
优化船舶主机燃油喷射系统故障诊断的GA-Elman神经网络
2021-12-14 01:28章志浩林叶锦刘如磊
计算机应用与软件 2021年12期
章志浩 林叶锦 刘如磊
(大连海事大学轮机工程学院 辽宁 大连 116026)
0 引 言
主机(即柴油机)是船舶的心脏,是保障船舶安全航行的关键。船舶柴油机朝着大功率、高功率和智能化方向发展,柴油机故障诊断技术是船舶实现智能化的关键技术之一[1]。目前90%以上的海上航行船舶的动力装置为柴油机,其中远洋航行船舶中低速二冲程柴油机扮演着越来越重要的角色[2]。作为陆地上很少使用的大型中低速二冲程柴油机,与普通柴油机相比,船舶主机长期在海上运转,根据海况的不同,工况更加复杂,工作周期更长,导致故障率更高,维修保养相对困难。同时,因为重油(HFO)价格相对较低廉,目前船用柴油机大部分燃用重油,而在入港时通常切换成船用柴油[2]。重油分子量大、粘度高,易造成燃油喷射系统喷嘴堵塞等故障,使船用主机燃油喷射系统工作环境更加恶劣。研究发现,近70%的船舶主机故障由主机燃油喷射系统引起。所以,船舶离港时主机故障更需及时、准确发现并解决,这进一步提高了对主机燃油喷射系统故障诊断的要求。燃油喷射系统的故障体现在主机的各个方面,如缸套水温度、排气温度等。因此,根据主机相关的参数变化可以判别主机喷射系统相关故障。
故障诊断问题在本质上是一个模式识别问题,即将诊断对象的状态分成正常状态和异常状态,进而将异常状态分为各种故障状态[3]。神经网络长期以来一直用于分类目的[4],因此,本文引入了神经网络对船舶主机燃油喷射系统进行故障诊断。通用的诊断方法应用较多的是前馈型神经网络,但前馈型神经网络存在自身的局限性。Elman神经网络具有适应时变过程的能力,比前馈型神经网络更适合于在线辨识[5]。以目前较为先进的GA-RBF算法为例,RBF作为一种局部逼近网络,由于缺乏负反馈机制,节点间关联性不强,导致其应用于故障诊断时存在精度不高、易陷入局部极小等缺点。同时,RBF模型还对初始中心的选取十分敏感,并且容易受到异常值的影响[6]。在应用于船舶主机燃油喷射系统的故障诊断时,燃油喷射系统本身的复杂性以及船况的多变使其缺点尤为明显。Elman神经网络作为一种递归神经网络,引入了负反馈机制,它的局部负反馈机制加强了节点与节点间、各个神经网络层之间的关联性,与RBF网络相比,诊断效果明显提升。在自组织神经网络中,PSO-SOM算法是较为热门的算法之一,它的诊断精度较高、收敛速度较快,但是SOM神经网络没有期望输出层,无法准确判断聚类效果的优劣[7]。由于结构上相对不完整,这种算法只能将故障样本聚类,而聚类的结果无法与具体的故障类型相对应。Elman神经网络在结构上比SOM神经网络更加完整,在故障诊断方面比SOM神经网络更加直观、可靠。它既能够保证诊断结果的准确性,也能够将诊断结果与故障类型准确对应。近年来Elman神经网络越来越多地应用到了故障诊断领域,如任聪[8]对于中央空调系统的故障诊断研究,皮骏等[9]对于航空发动机的故障诊断。但在船舶主机燃油喷射系统故障诊断方面,目前了解到的相关文献尚未有改进的遗传算法与Elman神经网络相结合的相关论述。本文针对喷油器喷嘴堵塞、喷油器喷嘴磨损、喷油定时提前、喷油定时滞后四种故障模式进行了相关研究,数据来源于大连海事大学轮机模拟器,主机型号为MAN B&W 7S80ME-C9.2。对相关参数进行分析,以这些参数组成特征向量,利用MATLAB软件中的工具箱建立船舶主机燃油喷射系统故障诊断模型。经验证,本文模型的准确性高于RBF神经网络和普通Elman神经网络算法,是一种行之有效的诊断船舶主机喷射燃油系统故障的方法。
1 模型设计
1.1 Elman神经网络
Elman神经网络的基本模型如图1所示。

图1 Elman神经网络结构
Elman神经网络在结构上由输入层、隐含层、承接层和输出层组成,分为学习和验证两部分。在BP神经网络的学习过程中,相关数据由输入层输入,由隐含层处理之后将结果传向输出层。如果结果与实际不符合,则将误差逆向传播到隐含层,修改相应的权值和阈值。学习过程结束后,则进入验证阶段,将相关数据输入,根据神经网络得出的结果与实际情况比较。而Elman神经网络与它的区别是:除了普通的隐含层外,还有一个称为承接层(又称连接层)的特别隐含层。连接层将隐含层的输出值一步延时反馈到隐含层的输入端,使网络具有记忆功能,增强了网络的全局稳定性,能够适应时变输入过程而不产生泛化,适用于在线诊断[5]。
Elman神经网络空间表达式如下:
Y(k)=g(w3u(k))
(1)
u(k)=q(w1uck)+w2X(k-1)
(2)
uc(k)=u(k-1)
(3)
式中:X(k)是神经网络的外端输入;u(k)为隐含层输出;Y(k)为网络的输出;w1为承接层权值;w2为隐含层权值;w3为输出层权值;g(·)为输出层的传递函数;q(·)为隐含层的传递函数。图2为Elman神经网络流程。

图2 Elman神经网络流程
1.2 遗传算法模型及其改进
遗传算法(GA)模拟了生命进化机制,即自然选择和遗传进化中的繁殖、交配和突变。GA中最优解是通过任意初始化种群繁殖和进化得到的[10]。图3为遗传算法的具体流程。
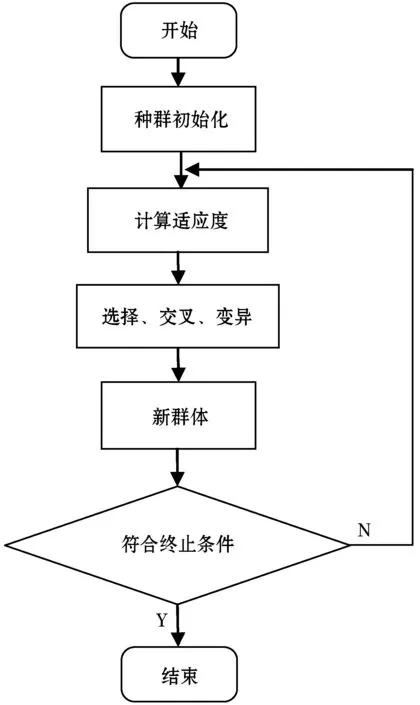
图3 遗传算法流程
传统遗传算法是一种通过模拟自然进化过程搜索最优解的方法,但是在处理一些较为复杂的优化问题时容易陷入到一些局部的极值点[11]。本文针对这种情况对遗传算法的算子进行了改进,提出一种自适应的遗传算法。
(1) 选择算子的改进。个体的选择直接决定了遗传算法的收敛速度和精度。通常选择算子采用随机遍历抽样法(sus),在sus中,各个个体被选择的概率与其适应度成正比,但是这种选择算子的方法存在收敛速度慢、易陷入局部最小值的缺点,最终会导致误差较大。为了使种群模式更加丰富,收敛速度更快,现对选择算子做如下改进。
假设种群中有m个个体,遗传代数为n,F(t)={F(n,1),F(n,2),…,F(n,m)},Pi在遗传算法的前期改进为:
(4)
Pi在遗传算法的中期及后期改进为:
(5)

在遗传算法的初期,进化代数增加的同时,适应度高于平均适应度的个体被选择的概率减小,低于平均适应度的被选择的概率增加。这样有效保证了遗传初期种群的丰富度,防止了过早收敛及陷入局部最小值的情况。在遗传算法的中期和后期,这个过程正好相反。这种算法的改进有效促进了种群的进化,大幅度提高了遗传算法的精度。
(2) 交叉算子的改进。在遗传算法的运行过程中,交叉概率同样是种群丰富度的重要保证。在遗传初期,为了保证丰富度,便于算法寻优,交叉概率较大;在算法运行过程中,为保证前期不收敛,交叉概率应适当减小,对交叉算子做如下改进:
(6)
式中:Pc和k3为0到1之间的常数;fmax为种群最大适应度;f′为较大适应度的个体。
(3) 变异算子的改进。变异算子是在进行交叉操作之后进行的,为确保后期算法不陷入局部最小值,对交叉算子作如下改进:
(7)
式中:P2及k4均为0到0.05之间的常数;fm为变异个体的适应度值。
1.3 改进GA-Elman神经网络模型
遗传算法和Elman神经网络结合的算法又称GA-Elman算法,它的流程如图4所示。

图4 改进GA-Elman神经网络流程
该模型包含3个部分,分别为Elman神经网络拓扑结构的确定、遗传算法对权值和阈值的优化和神经网络故障诊断3部分,基本步骤如下。
(1) 从轮机模拟器中采集相关数据及参数。
(2) 给定神经网络M组训练样本、N组测试样本,并将原始数据归一化。归一化公式为:
(8)
式中:y是矩阵中每个元素归一化后的数值;[ymin,ymax]为归一化区间,ymin通常取值为-1,ymax取值为1;x为归一化前的原始数据中的对应元素;xmax为每行元素最大值;xmin为每行元素最小值。
(3) 将Elman神经网络中的权值和阈值编码为二进制表示的个体,由隐含层权值、隐含层阈值、承接层权值、输出层权值、输出层阈值5部分组成。设定的神经网络输入层神经元数为8,隐含层神经元数为15,输出层神经元数为4,将所有权值和阈值编码,隐含层权值为120、阈值为15,承接层权值为225,输出层权值为60、阈值为4。
(4) 将误差的范数作为算法的适应度函数,公式如下:
(9)
式中:f为适应度函数;M为样本数;N为节点数;Pji和Zji分别为第i个节点的第j个神经元的理想输出和实际输出。
(5) 在GA-Elman神经网络中,利用改进的遗传算法优化Elman神经网络的权值和阈值,利用函数计算个体的适应度,通过交叉、变异等操作获得适应度更高的个体;将优化后的结果赋值给Elman神经网络部分,训练网络并输出诊断结果。
遗传算法的初始相关参数设定如下:种群大小为45,遗传代数为40,二进制位数为10,交叉概率为0.75,变异概率为0.02,代沟为0.95。
2 仿真研究
2.1 数据获取
通过仿真数据来产生数据集来训练算法是故障诊断领域的一种常用做法,因为在其他领域也难以获取标记数据,故本文采用仿真数据。样本取自大连海事大学轮机模拟器,船舶类型为VLCC,主机型号为MAN B&W 7S80ME-C9.2。轮机模拟器是通过数学模型在电脑上模拟机舱的装置,在主机系统中,基于主机系统的数学模型,仿真软件模拟了船舶主机的功能并设有多种故障状态,采用的数据取自实际船舶,数据真实性已经过验证。轮机模拟器的主机仿真模型为零维模型,将主机本体部分划分为增压器、中冷器、扫气箱等五个部分。在液压气缸单元中计算燃油泵柱塞下腔压力变化率、燃油泵柱塞上腔及高压油管内压力变化率、燃油泵柱塞运动方程、喷油器喷油油量,利用计算结果对燃油喷射系统进行建模[12]。同时,轮机模拟器的主机故障仿真系统采用了融合模型(MG),MG模型的输出参数耦合性强,具有非常好的故障表现能力[13]。
本文选取了主机的排气量(x1)、转速(x2)、排气温度(x3)、排气压力(x4)、缸套水温度(x5)、高压油管压力(x6)、功率(x7)、耗油量(x8)作为参数,将样本归一化后作为输入参数,所得值作为特征向量X=[x1x2x3x4x5x6x7x8]T。共选取52组故障数据,每种故障模式13组数据。其中:每种故障十组数据用作训练集,三组用作测试集。共40组数据组成训练集,12组数据组成测试集。由于故障数据较多,故选择展示部分原始数据见表1。经归一化后的Elman神经网络的船舶主机燃油喷射系统故障诊断部分输入样本数据见表2,部分测试样本见表3。

表1 原始数据

表2 部分输入样本数据

表3 部分测试样本数据

续表3
2.2 结果分析
分别建立Elman神经网络、GA-RBF神经网络、改进GA-Elman神经网络模型。Elman神经网络输入层、隐含层、输出层神经元个数分别为8、15、4。其中:输入层8个神经元分别对应8个故障特征值;输出层4个神经元分别对应4种故障模式,即油器喷嘴堵塞(T1)、喷油器喷嘴磨损(T2)、喷油定时提前(T3)、喷油定时滞后(T4),具体如表4所示。

表4 故障类型对应的期望输出
同时计算范数误差及均方误差。矩阵中各元素差的平方和的平均值的平方根称为均方误差,以此检测3个神经网络模型的优劣。遗传算法的优化结果见图5。均方误差的公式如下:
(10)
式中:Ti为测试集输出的第i个元素;Pi为测试集的第i个元素;n为测试集的样本中元素总数。

图5 改进后的GA与普通GA对比
可以看出,遗传算法在迭代过程中误差范数不断减小,表示网络的权值和阈值在不断地被优化。普通遗传算法在前5代的迭代过程中误差减小的速度最大,即优化的效率最高,但是很快便陷入了局部最小值,算法过早收敛,迭代至23代以后误差几乎不变。改进后的GA在前期保证了种群的丰富度、收敛速度较慢,避免了陷入局部最小值的问题。精度逐渐提高,在23代以后精度超过普通遗传算法。故改进后的遗传算法优于普通的遗传算法。
表5、图6、图7显示,Elman神经网络的训练样本范数误差及绝对误差较大,测试样本范数误差略低于GA-RBF神经网络且实际输出的隶属度较低,第11组数据明显陷入局部最小值,不易判断故障类型。由图6的曲线可知,GA-RBF神经网络比Elman神经网络隶属度有所提高,但是个别故障隶属度低于Elman神经网络。在图7中,GA-RBF神经网络曲线总体位于Elman神经网络曲线下方,绝对误差相对较小。改进GA-Elman神经网络诊断结果的隶属度基本位于图像最上方,除个别故障点外绝对误差最小且误差范数及均方误差最小,隶属度及精度最高。改进GA-Elman神经网络对测试样本的故障模式诊断只有第7组一处误判,准确率达到91.6%,仿真结果与测试组实际情况基本一致,如图8所示。

表5 3种神经网络诊断误差

图6 隶属度对比

图7 绝对误差百分数对比

图8 改进GA-Elman神经网络诊断结果
3 结 语
本文结合船舶主机燃油喷射系统工况复杂的特点,提出了优化船舶主机燃油喷射系统故障诊断的GA-Elman神经网络模型,并选取了4种典型的喷射系统故障情况。结果表明:
(1) 在相同的训练样本及测试样本下,对比Elman神经网络模型、GA-RBF神经网络模型、改进GA-Elman神经网络模型的故障诊断结果,证明了改进GA-Elman神经网络模型取得了更好的诊断效果。对于测试集的诊断在误差上大幅度减小,隶属度及诊断正确率更高。该模型对船舶主机燃油喷射系统的故障诊断提供了有效的保障,同时也为船舶其他系统的故障诊断提供了良好的借鉴。
(2) 通过对相关算子的改进,使改进后的遗传算法比普通遗传算法前期种群丰富度高、不易陷入局部最小值且精度更高。与Elman神经网络结合后,进一步提高了诊断的准确率。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
包装工程(2022年11期)2022-06-20
北京航空航天大学学报(2021年7期)2021-08-13
汽车工程(2021年12期)2021-03-08
科学家(2016年13期)2017-09-29
当代旅游(2016年10期)2017-04-17
科技视界(2016年1期)2016-03-30
物联网技术(2015年7期)2015-07-21
财经理论与实践(2015年2期)2015-04-16
