
北斗导航在农机物联网系统中的应用研究
2021-12-14 13:26程广河周胜国郝慧娟郝凤琦孟庆龙尹亚南
现代电子技术 2021年23期
程广河,周胜国,郝慧娟,郝凤琦,孟庆龙,尹亚南
(齐鲁工业大学(山东省科学院)山东省计算中心(国家超级计算济南中心)山东省计算机网络重点实验室,山东 济南 250014)
0 引言
农业机械耕种在整个农业生产中是至关重要的。普通的人工耕种需要大量劳动力,造成经济成本、时间成本的浪费,而且耕种上还存在一定的人为误差;在半自动化耕种中,特别是播种时,播种间距、播种数量不好把控,致使长出的秧苗间距、秧苗密度不均匀,还需要人为进行干预调整。为实现高效、便捷、准确的精耕细作,降低劳动力成本、时间成本,实时地监控工作过程,需要设计一套全自动化的农机耕种系统和农机物联网平台,此系统中,比较重要的就是需要一种移动终端和农机物联网平台进行实时通信、相对稳定的通信方式,一种精度相对较高的定位方法。本系统基于以上原因,采用卡尔曼滤波算法和H_∞滤波算法相结合,对农机终端实现更精确的定位;采用JT/T808 协议使农机终端与物联网平台进行实时通信,通过比较不同的通信方式,最终使系统达到最优化、更可靠。
1 通信系统结构
农机物联网系统主要由信息采集终端、农机定位控制器、农机终端、物联网云平台组成,其中,农机物联网系统总体结构设计框架如图1所示。一方面,北斗卫星的定位数据在农机定位控制器中进行卡尔曼滤波和H_∞滤波处理,基于JT/T808 协议,通过GPRS 网络发送给物联网云平台;另一方面,农机终端逻辑控制器S7⁃200 SMART 对农机进行逻辑控制,将农机反馈的信息通过RS 485 串口经GPRS 无线网络发送到物联网云平台,这样两个处理器分工合作,各自完成自身擅长的工作。物联网云平台接收到两个终端传来的信息,对信息集中处理、显示、反馈,为用户提供更加全面的信息展示,用户能更精确、实时地监控农机终端的运行。
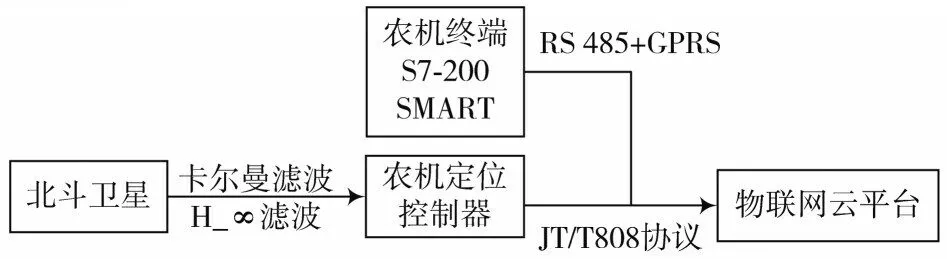
图1 农机物联网系统总体结构设计框架
本系统以播种机农机终端为例进行研究。
在系统中,需要进行研究的第一个是将卡尔曼滤波和H_∞滤波处理的北斗定位数据应用到农机移动终端,使其更精确、更平滑、更可靠,使定位数据更趋近于实际运行轨迹[1]。第二个是采用我国交通运输部2013年1 月发布的《道路运输车辆卫星定位系统北斗兼容车载终端通讯协议技术规范》(下文简称“JT/T808 协议—2013”)[2⁃3],该通讯协议有别于美国GSP 通讯的北斗定位通讯协议,是具有完全自主知识产权的协议,这有利于保障技术的创新和独立,不受限于外国技术,保障信息安全。基于本协议,农机终端的注册、鉴权、位置上报和通信应答等报文都可由农机定位控制器拼装处理,然后与物联网平台进行通信。第三个是农机终端报文上传到服务器采用的通信方式。其中设计了两种通信方式:第一种方式是采用农机终端的以太网通信端口TCP+HINET 智能网关的通信方式;第二种方式是采用农机终端的串口通信端口RS 485+USR⁃GPRS DTU。这两种方式都有其各自的特点,在不同的情况根据工程需要选择合适的方式。
下面针对这三个研究点分开进行论述。
2 采用卡尔曼滤波和H_∞滤波算法的北斗伪距单点定位
北斗导航的工作原理如图2 所示。北斗卫星接收机农机终端接收导航和观测文件,然后进行坐标时间的转换,计算校正卫星位置,然后进行滤波得到精确的定位位置的经纬、高程、速度[4]。

图2 北斗导航工作原理图
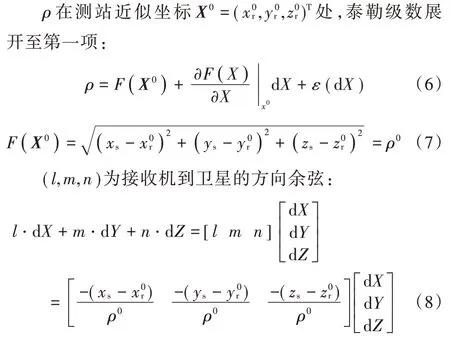
2.1 北斗伪距单点定位[5]
伪距测量基本思路:

式中ρ为卫星到观测站的几何距离。
相关系数如下:

式中:τ为延迟时间;Δt为卫星发送测距码到接收机的时间;u为测距码;u′为复制码;ΔT为测距码周期。
根据伪距单点定位原理,则伪距观测方程为:

式中:P为伪距观测值 ;,ρ为卫星与接收机之间的实际距离;c 为光速;dtr为接收机钟差;dts为卫星钟差。
卫星钟和接收机钟之间有时差,而且信号不是完全在真空中传播,所以存在大气传播延迟[6]。因此,北斗伪距单点定位观测方程精确如下:

式中:I为电离层延迟改正;T为对流层延迟改正;ε是伪

距的观测噪声和各路径延迟的影响。线性化后式(4)为:式中:ρ0为测站到卫星的距离初值;(dX,dY,dZ)为测站坐标的修正数,即接收机运动速度和卫星运动速度之差。
利用伪距观测方程进行卡尔曼滤波,即可求出测站坐标和接收机钟差。
2.2 卡尔曼滤波
滤波技术最主要的是将噪声、干扰去除,得到真实有效数据加以处理应用。卡尔曼滤波是通过将观测数据处理得到方差,利用线性系统状态方程得到动态系统状态最优估计。
卡尔曼滤波技术可以运用到GPS 的位置定位、速度和时间计算中,在北斗伪距单点定位中也可以使用该技术[7]。假设接收机(农机)低速运动(农机运动适用于该条件),所以农机运动可按照常速模型表示为式(8),即历元间接收机速度不变。

式中:k为历元号;X表示接收机状态向量;Φ表示状态转移矩阵;W为过程噪声向量。
运动模型表达式为:
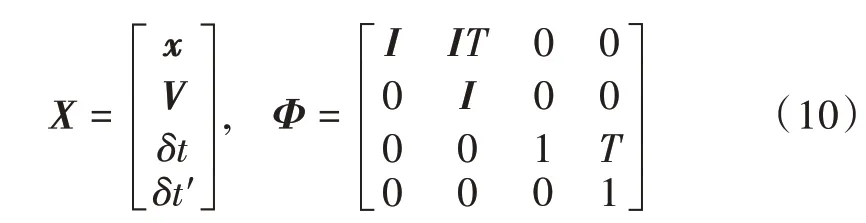
式中:T为采样时间间隔;x=分别表示接收机的位置和速度分量;δt和δt′分别为接收机钟差和频漂;I表示3×3 单位阵。
根据伪距单点定位原理和多普勒的观测方程,则:

式中:Z=为观测向量,P和D为伪距和多普勒观测值,λ为载波相位的波长;H=为观测向量与状态向量的关系矩阵;v表示接收机的运动速度。
根据运动方程和观测方程就可以组成卡尔曼滤波系统,进而能推出各个时间的状态向量和协方差矩阵[8]。其中:

2.3 H_∞滤波算法
农机播种定位精度要求相对较高,在实际应用中发现,使用卡尔曼滤波处理动态数据时,由于加速度等干扰因素的影响,造成观测值和真实值之间误差较大,因而为了在实际应用中减小模型误差和观测误差,采用H_∞滤波算法处理北斗定位动态数据,这样不但易于理解、实现,还大大减小了计算量[9]。
农机系统中只加入卡尔曼滤波处理动态数据和静态数据时,速度假设为低速匀速运动,方便动态和静态数据对比。因此加入H_∞滤波算法后,卡尔曼滤波算法中的速度变量变为0,其他处理方法不变,这里就不多做赘述[9]。
北斗定位动态数学模型系统状态方程如下:
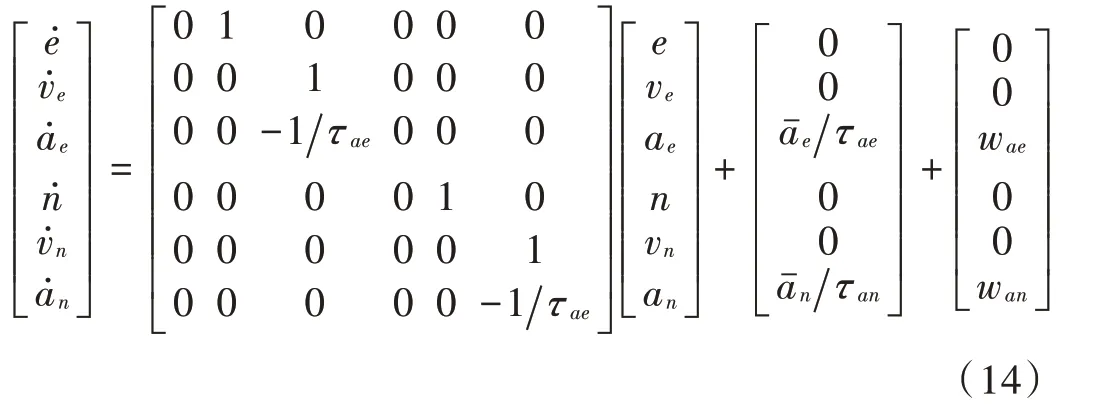
式中:Xk为系统状态n维状态向量;Yk为m维系统观测向量;W k为p维系统噪声向量;Vk为m维系统观测噪声向量;Φ k为n×n维系统状态转移矩阵;Hk为m×n维观测噪声序列;Γ k为n×p维系统噪声矩阵;Lk∈Rq×n,为给定的矩阵。
为了更接近真实状态,北斗观测信号设定为能量有限信号,不需要对干扰的特性做假设。
假设采样时间间隔为T,滤波器中L=H,进行离散化处理建立各离散滤波方程。
滤波后预测状态方程为:
3 JT/T808—2013 协议和通信方式
道路运输车辆卫星定位系统北斗兼容车载终端通讯协议技术规范(简称:JT/T808—2013 协议)规定了农机车载定位终端与农机物联网平台之间的通信协议和数据格式,包括协议基础、通信连接、消息处理、协议分类与说明及数据格式[10]。
农机物联网通信系统主要依托本协议,实现农机车载终端和农机管理云平台之间的通信。农机车载终端选用西门子S7⁃200 SMATR PLC,通过PLC 编程一方面实现农机的逻辑控制,另一方面,将卫星终端传来的数据发送到物联网平台。基于JT/T808—2013 协议,利用西门子S7⁃200 SMATR PLC 编程,主要实现注册、鉴权、位置上报等报文[11]。
图3 为通过各个终端传输后在服务器中显示的鉴权、位置等信息,而且实现了云平台对农机终端的实时监控,图4 为农机管理云平台对农机监控的实时数据显示。
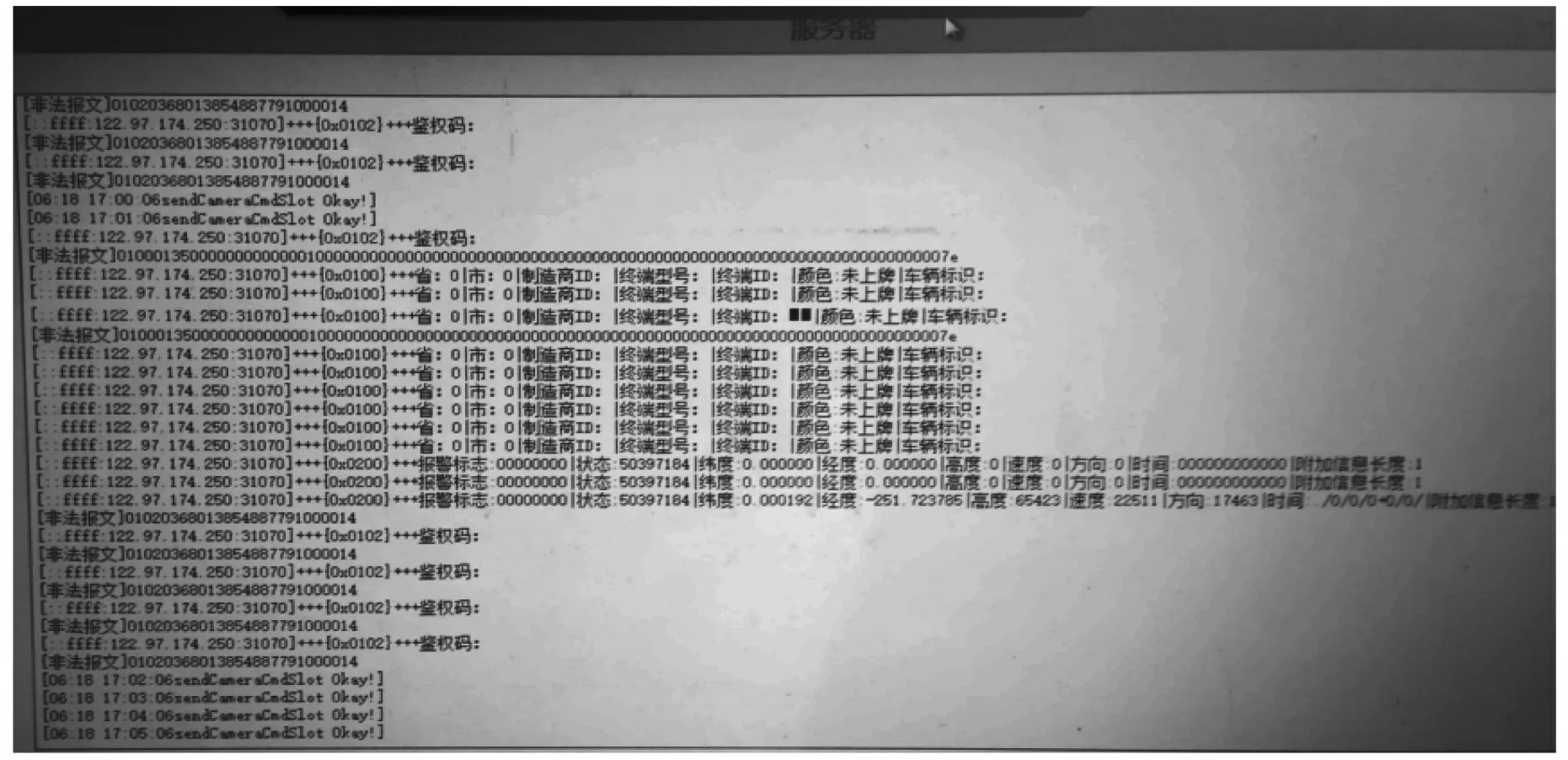
图3 物联网云平台中鉴权、位置信息接收

图4 农机管理云平台主界面
选定通信协议后,下面就是通信方式的问题。农机终端S7⁃200 SMART PLC 与农机管理云平台之间有两种通信方式,分别是RS 485 串口通信方式和TCP 通信方式[12]。其中,串口通信方式的RS 485 接口需要配合连接USR⁃GPRS DTU 模块实现与上位机的通信;TCP 通信方式网络传输部分选用HINET 智能网关。通过实验分析,RS 485 串口通信方式比TCP 通信方式结构简单、时效性强、延时更小,而且串口通信方式成本更低,所以综合分析选取串口通信方式。
4 工程测试
本研究依托山东省计算中心山东省农机管理云平台在济宁市兖州区大安镇小王庄村进行定位信息测试实验,采用山东省计算中心自主研发的山科智能SK2810NJ 农机控制器。经过测试,H_∞滤波算法和卡尔曼滤波算法相结合,使定位精度更加准确,达到了播种、深耕和收获的要求[13]。图5 为农机工作时,工作数据传输到云平台的轨迹图。

图5 济宁市兖州区大安镇小王庄村农机定位轨迹图
在只使用卡尔曼滤波算法或者最小二乘法处理北斗数据时,将农机定位控制器的测算结果与精确坐标对比计算均方根误差(RMSE),静态和动态对比结果如表1,表2 所示。
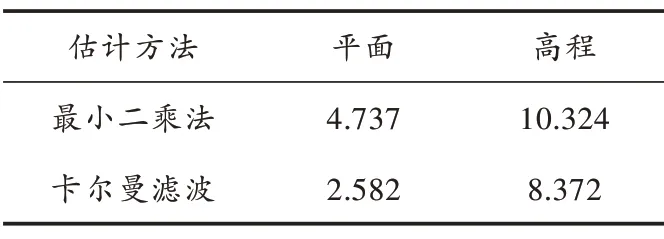
表1 静态定位RMSE 精度
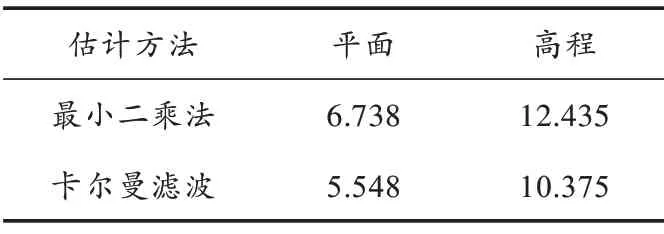
表2 动态定位RMSE 精度(一)
从表中可以看出,卡尔曼滤波算法相对于最小二乘法伪距单点定位的定位性能有提高,在平面方向上,静态定位提高45%,动态定位提高17%;高程上,静态定位提高19%,动态定位提高16%。总的来说,静态数据表现较好,不过农机工作状态是运动的,动态数据的精确度、可靠性需要进一步提高。
因此,动态数据方面,将H_∞滤波算法和卡尔曼滤波算法相结合之后的定位结果和已知的精确坐标进行处理计算,得到均方根误差(RMSE),并与单纯采用卡尔曼滤波进行比较,结果如表3 所示。

表3 动态定位RMSE 精度(二)
从表3 中可以看出,在动态数据处理方面,卡尔曼+H_∞滤波算法相对于只使用卡尔曼滤波算法的定位性能有提高,在平面方向上动态定位提高25%;高程上动态定位提高16%。总的来说,动态数据表现很好,定位可靠,之后可以进一步优化算法,提高定位性能。
5 结论
本研究内容建立在农机物联网的基础之上,将信息采集、处理、传输相互协调融合,使整个系统相互兼容,通过调试达到最优。由于农机物联网系统客观环境因素较多,对检测设备的精度要求比较高,特别是在精确播种方面,更是对北斗定位的要求比较高。利用卡尔曼滤波算法和H_∞滤波算法对信号进行处理,达到了精确播种的目的,不过在实际工程应用中,北斗信号会受到建筑物和高大树木等物体的遮挡,影响信号的传输而引起位置漂移,现初步根据位置、速度、时间进行简单的预测,在之后的研究中应找到更好的处理方法。同时,需要实现农机终端与农机物联网云平台的实时、稳定通信,达到精耕细种,甚至对每一粒种子实现定位监控,更精确实现选培育良种,这是以后农机播种技术需要发展的方向。
猜你喜欢
军事文摘(2023年20期)2023-10-31
小哥白尼(神奇星球)(2022年3期)2022-06-06
当代陕西(2019年18期)2019-10-17
北京航空航天大学学报(2017年9期)2017-12-18
测绘科学与工程(2017年3期)2017-08-16
测绘通报(2016年12期)2017-01-06
太空探索(2016年3期)2016-07-12
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
导航定位学报(2015年2期)2015-06-05
