
基于六旋翼无人机平台的GNSS 干扰源测向与定位系统设计与实现
2021-12-14 08:32孙兴信甄卫民张发祥
全球定位系统 2021年5期
孙兴信,甄卫民,张发祥
( 中国电波传播研究所,山东 青岛 266107 )
0 引 言
本文设计了一种基于六旋翼无人机平台的全球卫星导航系统(GNSS)干扰源测向与定位系统,该系统主要由无人飞行器、空中监测测向载荷、地面控制站三部分组成,无人飞行器选用现阶段技术成熟的六旋翼无人机平台. 此飞行平台已被广泛应用于航拍、植保、电力巡检等行业. 空中监测测向载荷是基于双通道采样的超外差接收机[2],技术较为成熟,文章方案进行了小型化、轻量化的设计,能够满足六旋翼无人机平台的载重要求. 地面站采用了大功率图传设备,能满足长距离数据传输的时效性要求. 图1 为该系统的实物图,作者研究团队在某飞行场区进行了干扰源定位精度的测试,证明此技术路线是切实可行的.

图1 基于六旋翼无人机平台的GNSS 干扰源测向与定位系统
六旋翼无人机提供干扰监测测向设备的搭载平台,可以装载监测测向设备. 机身和起落架之间预留足够的空间,可挂载体积较大的吊舱和云台,搭载的设备使用无人机电源进行供电.
空中监测测向载荷主要包括监测测向主机、监测测向天线、电子罗盘等,主要完成对干扰信号的监测、测向. 在查找干扰源的过程中,相机对干扰环境进行拍照,数传发射设备和图传发射设备分别将监测数据和图像信息实时回传地面控制站.
地面控制站一方面完成对无人机飞行器的控制和飞行路线的显示;另一方面完成干扰监测信号的实时接收、处理、显示,以及参数设置等. 地面控制站硬件设备组成主要包括:数传设备、图传设备、飞控设备、监控终端(含监控计算机1 台、数据处理计算机1 台)等,软件包括地面无人机飞行显控软件和干扰源监测与定位软件.
1 六旋翼无人机平台
基于六旋翼无人机平台的GNSS 干扰源测向与定位系统采用定制的六旋翼无人机系统,该系统主要用于执行城市、丛林、山地等复杂地形环境下的侦察、监视、跟踪、识别地形和道路通行情况观察,以及侦察校射等任务.
如图2 所示,六旋翼无人机系统由飞行器子系统、测控子系统、综合保障子系统、任务载荷子系统组成.
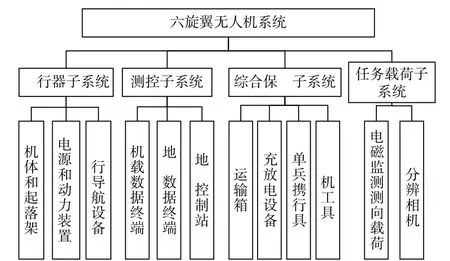
图2 六旋翼无人机系统组成图
2 空中监测测向载荷
空中监测测向载荷主要由测向天线阵(含切换开关)、射频模块、中频模块、电子罗盘、电源控制模块组成. 其中测向定位所需的GPS 数据由无人机平台实时提供,空中监测测向载荷架构组成图如图3所示.
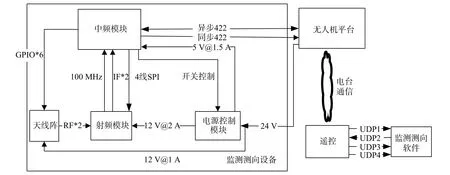
图3 空中监测测向载荷架构组成图
无人机测向天线由1 000~3 000 MHz 天线阵、射频开关矩阵、结构件等几部分组成. 无人机测向天线的外形示意图如图4 所示,高度约0.2 m,总重量小于1.2 kg.
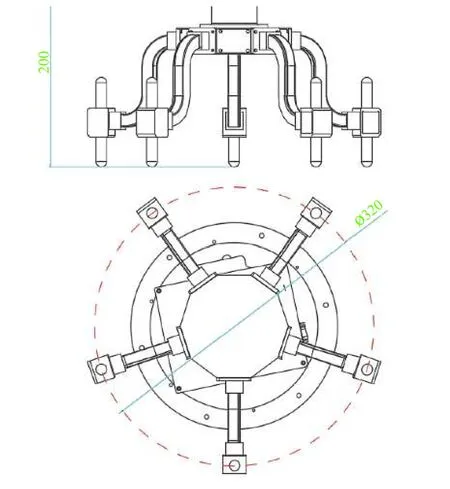
图4 天线示意图
测向天线阵采用五振元天线阵,频率覆盖方位1 000~3 000 MHz. 测向定位天线包括天线阵元、电子罗盘和射频开关. 天线阵元接收空间中的电磁信号,经由天线阵控制器中的RF 信号模块处理后,输出可用于无线电测向的RF 信号,以便后续进行测向定位算法. 电子罗盘提供磁北方向,开关矩阵选择两个天线阵元接到两路输出通道上. 测向天线阵原理图如图5 所示.
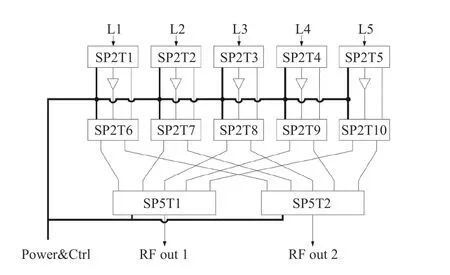
图5 测向天线阵原理图
空中监测测向接收机采用超外差式数字接收机技术研制[3-5],结合固态微波及嵌入式软件技术,将来自天线的1 000~3 000 MHz 射频信号下变频成76.8 MHz 中频输出到AD,经带通采样后,转换成数字信号[6].
3 地面站
地面控制站一方面完成对无人机飞行器的控制和飞行路线的显示;另一方面完成干扰监测信号的实时接收、处理、显示以及参数设置等.
地面控制站硬件设备组成主要包括地面数传终端、图传终端、地面飞控便携计算机(便携式工业地面站)、数据处理终端等.
六旋翼无人机系统地面站软件包括地面无人机飞行显控软件和干扰源监测与定位软件. 两款软件可以将结果融合处理显示,根据无线电监测管理软件定位结果,可通过飞控软件设置无人飞行器自动飞行,逐步逼近发射源. 在飞机遥控范围边缘报警、返回.
4 工作流程
基于六旋翼无人机平台的GNSS 干扰源测向与定位系统的工作流程主要是先发现干扰源,再提取干扰源参数信息,然后对干扰源进行测向,最后进行交汇定位,找到干扰源位置. 具体流程如图6 所示.
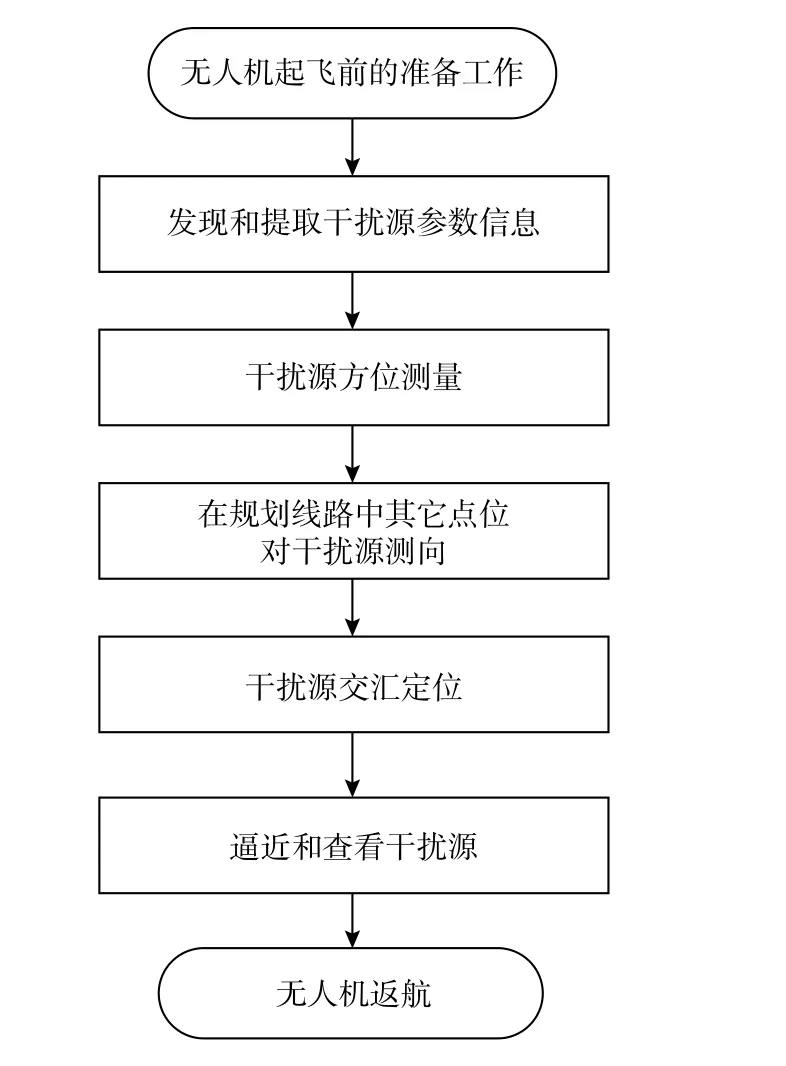
图6 系统工作流程图
a) 无人机升空前准备工作:规划好飞行路线(用于查找干扰源位置,飞行轨迹一般采用“L”形状,即L型航迹规划),给整套设备加电启动,检查设备和通信链路是否正常.
b) 发现和提取干扰源参数信息:无人机垂直升空到指定高度后原地驻留,电磁监测测向载荷开启频率扫描监测模式,发现和提取干扰源参数信息,对干扰源信号参数信息进行本地存储,同时将结果上报.
c) 干扰源方位测量:获取干扰源信息参数后,在该驻留点位对该干扰源进行测向,结果在本地存储并同时将结果上报.
d) 规划其他点位对干扰源测向:第一个驻留点位测向完毕,按规划的其它点位,对该干扰源进行测向,结果在本地存储并同时将结果上报;无人机空中测试完成,返回地面.
e) 干扰源定位:通过每个驻留点位的干扰源参数提取和方位测量的结果,对干扰源交汇定位.
f) 逼近查看干扰源:干扰源定位后,评估干扰源在无人机飞行范围内,无人机可逼近干扰源位置,通过相机载荷,对干扰源进行监视.
5 试验验证
试验验证平台由待测设备、模拟信号源、发射天线和测试软件等组成,如图7 所示. 试验验证平台一般架设于空旷无遮挡、电磁环境好的标准场地,按照工作流程放飞无人机,并调整工作模式;选定某一地点架设干扰系统,利用干扰源发射连续波、调频、调幅等多种干扰.
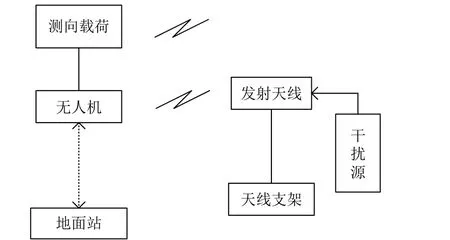
图7 试验验证平台
通过以上论述,作者研究团队在河南省安阳市六寺小学附近进行了一次针对基于六旋翼无人机平台的GNSS 干扰源测向与定位系统的验证试验,飞行图如图8 所示.

图8 试验验证飞行照片
起飞后,在某一地点架设干扰系统,利用干扰源发射连续波、调频、调幅等多种干扰. 干扰源测向与定位系统开始工作,首先监测北斗卫星导航系统(BDS)/GNSS 频段附近有无干扰,如果有干扰,则选定第一个地点对干扰源进行测向,如图9 所示. 测向结束后,保存数据,执行L 型航迹规划指令,无人机自动飞到第二个合适的地点,同样对该干扰进行测向,并联合第一次的测向结果进行交叉定位,如图10 所示.

图9 选定第一个地点对干扰源进行测向

图10 飞行L 型轨迹后的第二个地点对干扰源进行测向并交叉定位
通过此次试验验证,干扰源系统选取BDS/GNSS主要频点(f1,f2,···,fn),发射连续波、调幅、调频等多种窄带、宽带干扰源,并通过干扰源测向与定位系统对干扰源进行检测、定位,从以下测试表格中得到检测时间、检测概率、干扰源测向精度、定位精度.
此次试验共发射了6 种干扰类型,即F1 连续波干扰、F1 调频干扰、F1 调幅干扰、F2 连续波干扰、F2 调频干扰、F2 调幅干扰(F1 指干扰频点1,F2 指干扰频点2,在此次试验中F1 选取1 268 MHz,F2 选取1 575 MHz). 每种干扰类型进行了20 次飞行试验,统计每次试验的成功率(10 min 内定位出干扰源位置即为成功)即为检测概率[1]. 从开始飞行到定位到干扰源位置的时间间隔为检测时间. 测向精度为每一次测向结果与真实方向值(真实方向值通过试验前的GPS 打点值计算得出)的方向差. 干扰源定位精度的计算为:首先计算测得干扰源位置与真实干扰源位置的距离,然后计算两次测向过程中第一次测向点位与真实干扰源位置的距离,最后得到二者的比值,即为得到的干扰精度. 统计每次干扰精度值,取平均值填入表1.
测试表格如表1 所示,数值均为每种干扰类型下得到的数值平均值.
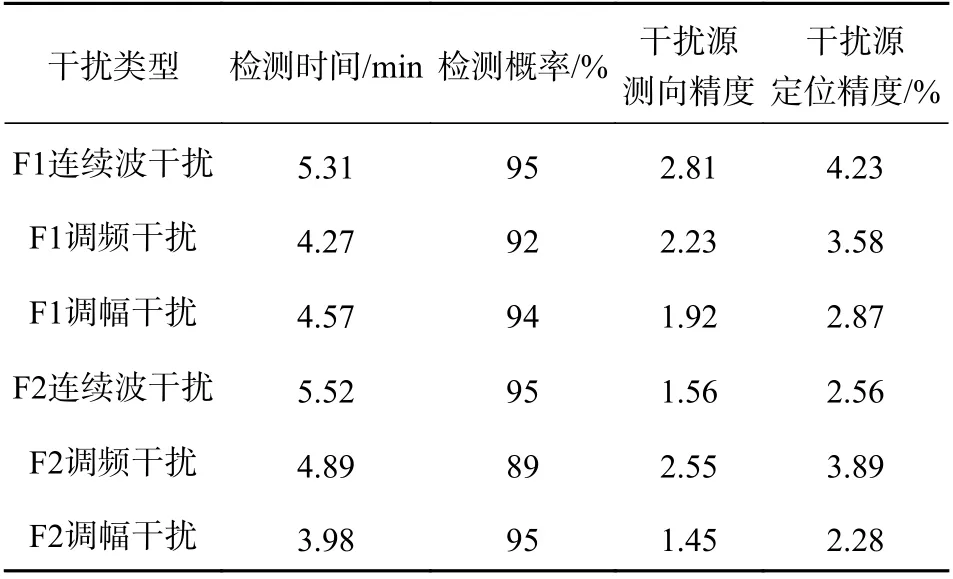
表1 测试表格
通过此次试验,可以该系统的研制方案切实可行,可以对特定类型的干扰源进行有效的查找与定位,解决了某些不利地形情景下查找干扰源的难点.通过统计[7]. 可以看到,以R为测量半径,该系统的测向精度在3°以内,定位精度在5%.
6 结 论
无论是车载还是手持式干扰源查找设备,查找过程受地面环境影响较大,有时存在遮挡、或不易逼近干扰源等情况发生. 为探索干扰源定位新方式的可能性,作者研究团队打破了基于无人飞行器的导航干扰源探测方面主要集中在理论研究与仿真实现阶段的束缚,试制一套基于六旋翼无人机平台的GNSS 干扰源测向与定位系统,可以实现对特定类型的干扰源进行有效的查找与定位,解决了某些不利地形情景下查找干扰源的难点.
猜你喜欢
水上消防(2022年2期)2022-07-22
计算机仿真(2021年2期)2021-11-17
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年6期)2021-07-20
舰船科学技术(2021年12期)2021-03-29
科技创新导报(2016年30期)2017-03-15
科教导刊·电子版(2016年15期)2016-06-25
数字技术与应用(2014年12期)2015-05-04
