
多重相干分析法结合OTPA技术在汽车路噪主动控制中的应用
2021-12-14 07:46史晨路
重庆理工大学学报(自然科学) 2021年11期
郑 森,史晨路,吕 晓,高 坤,张 贤
(1.河北工业大学 机械工程学院, 天津 300401;2.中汽研(天津)汽车工程研究院有限公司, 天津 300300)
随着国内汽车行业的快速发展,汽车NVH(noise vibration harshness,NVH)性能已经成为评价汽车舒适性的重要指标,汽车路噪主动控制(active control of road noise,RANC)技术已成为目前汽车NVH行业的潮流方向。路面噪声是汽车噪声的主要来源之一,利用工况传递路径分析(operational transfer path analysis,OTPA)技术可离线排除干扰信号,分解出汽车路面结构噪声。国内外的诸多研究和应用证明汽车路面噪声是可控制的,韩国现代汽车的杰恩斯GV80已经将路噪主动控制技术应用在实车中,并提出参考信号必须和车内被控噪声信号是强相关的。如何在众多可能的参考点中寻优出最佳组合,是汽车路噪主动控制系统开发流程中的关键步骤。
李传兵等[1]对传统的传递路径方法进行改进,利用OTPA技术分析乘用车的车内噪声,计算了各个独立声源对总噪声的贡献率。杨洋等[2]采用优化的多重相干法对汽车被控噪声进行分解,计算出各个独立声源对被控噪声的贡献量。多重相干法主要采取设定阈值的方法对汽车被控噪声信号的自功率谱进行优化,计算出多重相干系数,并依据信号相干性的优劣对参考信号布置点进行分组。刘佳音等[3]结合Hankel矩阵和奇异值分解法对齿轮噪声信号进行降噪处理,主要原理是将噪声信号向量转化成Hankel矩阵,并结合不同的奇异值分解法对目标矩阵进行优化处理重新合成信号,可剔除干扰信号,达到最终消噪的目的。琚林锋等[4]提出了一种汽车路噪主动控制的参考信号的选取方法,该方法主要根据被控噪声的峰值处对应的频段计算参考信号与被控噪声的相干性,进而对参考点的位置和数量进行优化。综上所述:目前OTPA技术大多数应用在传统的被动降噪分析中,用来确定某结构所产生的特定频段噪声,然后进行结构优化以消除噪声;目前提出的参考信号优化方法选取的频段范围有限,并且被控噪声与参考信号的相干性计算不够准确,汽车RANC系统难以达到最佳的降噪效果。
鉴于此,提出一种基于奇异值中值法的OTPA技术结合多重相干理论寻优参考信号组合的方法,并将其应用在汽车RANC系统中。首先,利用基于奇异值中值法的OTPA技术对汽车噪声进行分解并消除干扰信号;其次,利用多重相干理论从车外振动参考信号中寻优出相干性高的参考信号通道组合;最后,建立基于滤波x最小均方算法(filtered-x least mean square algorithm,FxLMS)的多通道RANC系统模型并进行仿真,验证提出的优化方法在汽车路噪主动控制系统中选取参考信号方面的优越性。
1 工况传递路径分析(OTPA)技术
由于新能源汽车没有发动机噪声的掩蔽,且不断向轻量化、电子化方向发展,路面噪声问题变得更加突出。汽车路面噪声是指汽车在路面上行驶时,路面不平度对轮胎产生多点和多方向的随机振动激励,振动从轮胎传递到轴头,并通过轴头传递到车内悬架、车架等部件而产生的轰鸣声。产生汽车路面噪声的传递机理主要分为结构传递噪声和空气传递噪声。由结构传递的噪声主要分布在400 Hz以内,如在频带30~50 Hz中产生的“鼓噪”声,频带80~140 Hz中产生“隆隆”的“路噪”声,以及200 Hz左右的胎噪声。而由空气传递的噪声主要分布在400 Hz以上,如有“沙沙”声的轮胎花纹噪声,并且车内噪声的频带范围会随着车速的不同而发生改变[5-6]。OTPA技术可有效地对噪声信号进行路径识别和贡献量分析,确定出振动传递的关键路径,可应用在汽车噪声主动控制领域。
1.1 OTPA技术原理
OTPA技术是基于传递路径分析(transfer path analysis,TPA)技术衍生出的一种有限振动传递路径的测量方法,是一种线性传递函数的数值计算方法。相较于传统TPA技术,OTPA技术在识别路径和贡献量分析时不需要拆除汽车零部件,可直接利用工况数据计算出不同路径的传递函数[7-8]。因此该方法可直接应用到汽车噪声的分解中,能够解决结构噪声和空气噪声之前的串扰问题。原理公式如下:
(1)
式中:p表示车内m点的总响应,Fi和Qj分别表示激励源作用到车内机械系统的激励力和体积速度;Hni、Hnj分别表示力载荷和声载荷到目标响应点的传递函数。其中目标噪声响应点处的噪声是由结构声场和空气声场叠加而成,上述公式可简化为:
p=ak+βm
(2)
式中:ak表示力载荷,βm表示声载荷,目标总响应p为:
则可求得传递函数H为:
式中:n表示测试工况数;k、m分别表示振动参考点和声音参考点的个数;ank表示在第n个工况点第k个振动参考点的响应值;βnm表示在第n个工况点第m个声音参考点的响应值;Hak表示在第n个工况点第k个振动参考点到目标噪声响应点的传递函数;Hβm表示在第n个工况点第m个声音参考点到目标噪声响应点的传递函数。
根据上式求出的传递函数H,可确定某一特定工况下各路径对目标噪声响应点的贡献量,但是基于实际情况,载荷矩阵不一定是可逆方阵,并且在载荷矩阵中存在信号之间的串扰问题,所以需对载荷矩阵求伪逆矩阵和奇异值优化处理。
1.2 奇异值分解
OPTA技术的基本原理是利用逆矩阵法对载荷矩阵进行识别,在矩阵求逆的过程中,奇异值分解法(singularvaluedecomposition,SVD)可将矩阵转换为正交空间,不同的奇异值和奇异值向量代表了目标矩阵中线性无关的项,并按贡献量大小进行排序[9-10]。具体原理如下所示:
A=UΛVT
(3)
式中:A表示n×(k+m)的载荷矩阵,U表示n×(k+m)的左奇异矩阵,V表示(k+m)×(k+m)的右奇异矩阵,Λ表示(k+m)×(k+m)的奇异值对角矩阵。试验工况数n要大于参考点数(k+m),以保证载荷矩阵求逆有唯一解。奇异值矩阵Λ可表示为:
奇异值矩阵Λ中,对角矩阵的元素为从大到小的奇异值,也代表了主成分分析中贡献量的大小。贡献量较小的值对目标噪声响应点影响较小,大部分是测量误差或是信号间的串扰所导致的,所以对部分奇异值进行置零处理,从而提高载荷矩阵的准确度。结合式(3),求得载荷矩阵的伪逆矩阵:
A-1=(ATA)-1AT=VΛ-1UT
(4)
由此求得不同路径的传递函数:
H=(ATA)-1ATP=VΛ-1UTF
(5)
1.3 奇异值选取方法
根据上述理论,奇异值的置零处理对载荷矩阵有很大影响,如果置零处理的奇异值少,生成的目标矩阵仍会出现测量误差、串扰等现象;如果置零处理的奇异值多,生成的目标矩阵则不会体现主要的噪声特征。所以需要选择合适的奇异值选取方法对奇异值进行置零处理。奇异值的选取方法主要有能量差分谱法、均值法、中值法等。
1.3.1能量差分谱法
对载荷矩阵进行奇异值分解后,根据奇异值σ按大小顺序排序,并对其进行能量差分谱计算:
(6)
式(6)表示相邻2个奇异值σ对应的能量分布,如果相邻2个奇异值之间能量相差较大,在奇异值能量频谱图中会出现一段峰值,则说明第i个奇异值之后发生突变,该点是目标信号与串扰信号的分解点,因此将第i个之后的奇异值全部设定为零,并合成新的目标矩阵。
1.3.2均值法
对载荷矩阵分解出的奇异值,计算所有奇异值的平均值,并基于平均值对奇异值进行选择。
(7)
根据式(7),将小于平均值的奇异值设定为0,并合成目标矩阵。
1.3.3中值法
对载荷矩阵分解出的奇异值,计算所有奇异值的中值,并基于中值对奇异值进行选择。
(8)
根据式(8),将小于平均值的奇异值设定为0,并合成目标矩阵。
2 多重相干法
(9)
(10)
式中:Sxd(f)为目标信号d(n)与参考x(n)的互功率谱;Sdd(f)和Sxx(f)分别为目标信号d(n)和参考信号x(n)的自功率谱。若目标信号d(n)与参考信号x(n)互不相关,则Sdx(f)=0;反之,则Sdx(f)≠0,Sdx可表示每个频率点参考信号x(n)与目标信号d(n)的相干性。
(11)
最后,对该向量进行筛选,找到与目标点相干性最大的参考点,并基于该参考点寻求下个位置的参考点,逐步列出参考信号的最优组合。
3 结合OPTA技术的多重相干分析法
在选取汽车路噪主动控制系统参考信号的过程中,汽车的结构特性和运行工况会直接影响参考信号的选取。新能源汽车噪声没有发动机噪声的掩蔽,路噪、风噪及其他噪声会更加突出,若直接使用多重相干理论,选取的参考信号不能体现出目标信号特性——多重相干分析法无法在相干分析时区分其中的路面结构和空气噪声成分。为提高路噪主动控制系统中参考信号选取的准确性,因此采用OTPA技术对多重相干分析法进行优化调整[11-12]。
使用OTPA技术,可将车内目标位置中的路噪成分进行分解,分解后的残差信号中仅包含路面空气噪声与风噪成分[13]。利用多重相干理论对分解后的目标噪声在20~400 Hz频段内进行参考信号组合的寻优工作,参考信号组合寻优拓扑流程如图1所示。

图1 结合OTPA技术的多重相干法寻优参考信号流程框图
为了验证OTPA技术结合多重相干法的有效性,需要进行实车数据采集工作,采集的实车数据为某电动SUV汽车在城市沥青路面80、120 km/h匀速工况下的噪声和振动信号。
如图2所示,数据采集设备为HEADlab(便携式模块化多通道数据采集系统),设定采样时间为60 s、采样频率为16 000 Hz、采样点数为960 000,在后排一座椅头枕处放置2个麦克风,在其他3个座椅头枕处放置3个麦克风,在车内A、B、C柱处两侧放置6个麦克风,共11个声音通道,前2个通道用于采集后排乘客头枕处的2个被控噪声信号,后9个声音通道用于分析车内声场;为更好的体现汽车路噪噪声特性,在车外的汽车轴头附近和悬架上安置13个振动加速度传感器测量3个方向(X、Y、Z)的振动信号,共31个输入通道(其中部分加速度传感器仅使用部分方向的振动信号)。

图2 数据采集仪器及传感器布置示意图
利用OTPA技术对试验数据处理具体过程如下:
1) 计算各个测点的功率谱,建立传递路径计算网络,并建立480 000×1阶被控噪声信号和480 000×31阶载荷矩阵。
2) 对上述载荷矩阵进行SVD分解。对计算出的31个奇异值进行归一化处理,防止出现主成分错误衰减,结合奇异值选取方法对31个奇异值进行置零处理;计算输入端和被控噪声的传递函数。
3) 基于计算出的传递函数分解出480 000×1阶的路面结构噪声信号,并与原始噪声信号进行对比。
为验证采用不同奇异值选取方法的OTPA技术对原始噪声进行处理后的效果,采用信噪比和均方根误差作为评价信号质量的客观指标。
1) 信噪比SNR
(12)
式中:x和z分别表示原始信号和处理后信号的声压,n表示时域信号长度。
2) 均方根误差RMSE
(13)
式中:x、z分别表示原始信号和处理后信号的声压,n表示时域信号的长度。均方根误差RMSE表示原始信号与处理后信号之间的误差关系。其中,信噪比SNR的值越大,均方根误差RMSE的值越小,则处理后的信号越接近原始信号,得到的信号的质量也越好。基于3种不同奇异值选取方法的OTPA技术对车内噪声信号分解效果如表1和图3所示。

表1 不同奇异值选取方法优化效果指标
由表1和图3可知,基于3种奇异值选取方法的OTPA技术对原噪声的分解出的信号,均没有出现失真现象,其中奇异中值法的信噪比最高、均方根误差最小,并且基于奇异值中值法的OTPA技术分解的目标信号更好地保留了原噪声信号的主要特征。因此,基于奇异值中值法的OTPA技术分解的目标噪声的效果是最好的,选取上述采集的实车数据进行分解,得到的目标信号声压级频谱如图4和图5所示。

图3 时域图优化效果

图4 80 km/h工况下后排一座椅头枕处噪声频谱
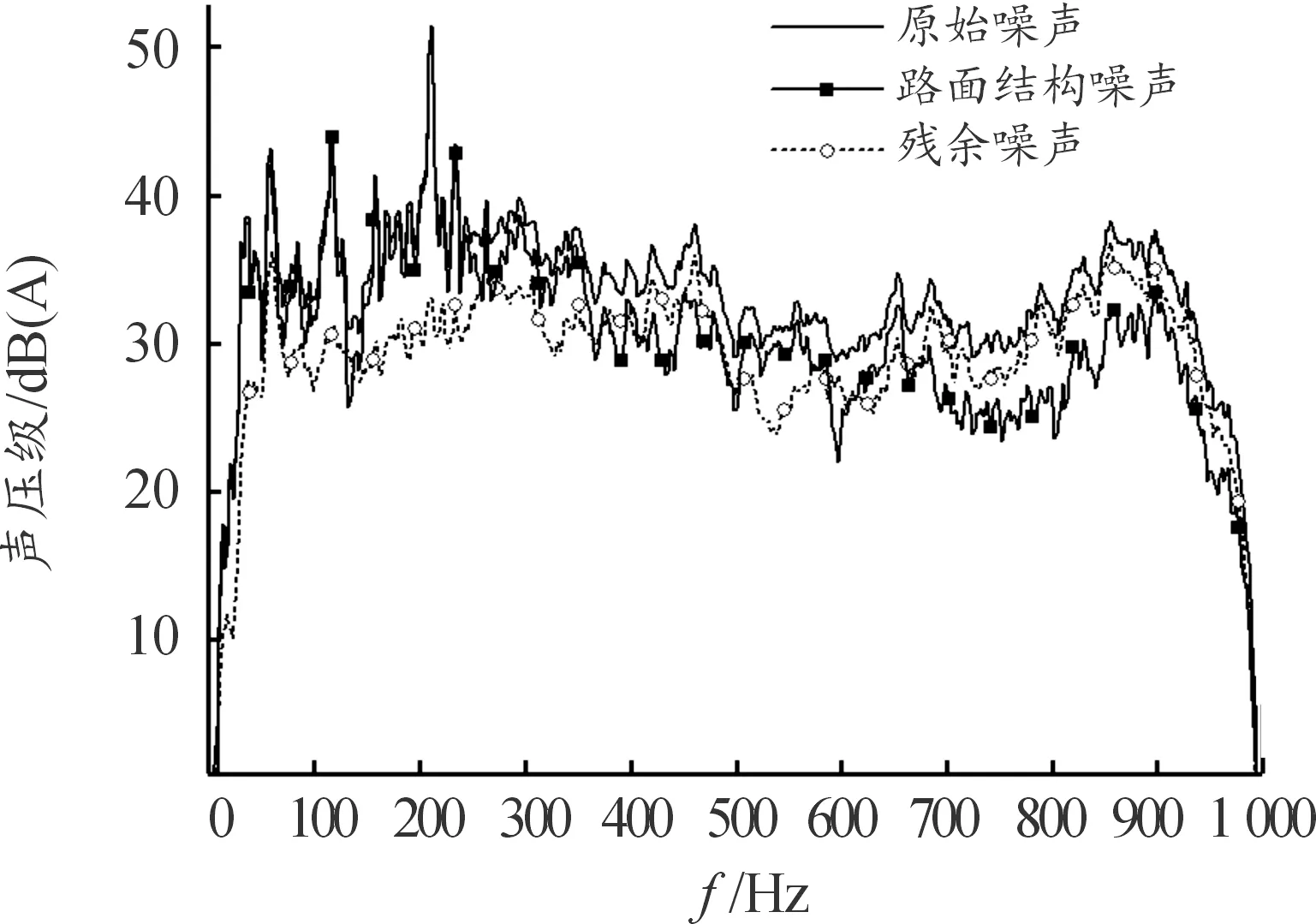
图5 120 km/h工况下后排一座椅头枕处噪声频谱
由频谱图可得,分解的路面结构噪声与原始噪声在频率20~400 Hz较吻合,而残余噪声与原始噪声在频率400~1 000 Hz较吻合,验证了该方法的正确性,并得出随着车速的提高,噪声的主要成分逐渐向高频方向偏移。
使用多重相干法对分解出的路面结构噪声进行参考信号组合寻优,对31个振动信号与2个被控噪声信号进行多重相干性计算,选取出8个强相干的参考信号通道。
多重相干法和优化多重相干法在80 km/h和100 km/h工况下对参考信号通道组合寻优的结果如表2和表3所示。
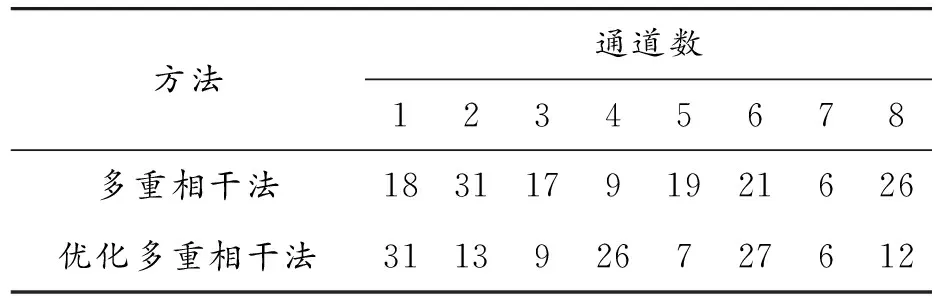
表2 80 km/h工况参考信号相干性寻优组合

表3 120 km/h工况参考信号相干性寻优组合
4 仿真分析和实车试验
基于FxLMS算法建立Matlab/simulink多通道RANC模型对车内路噪进行仿真分析,以验证不同方法寻优的参考信号组合对汽车RANC系统降噪效果的影响,仿真模型如图6所示。
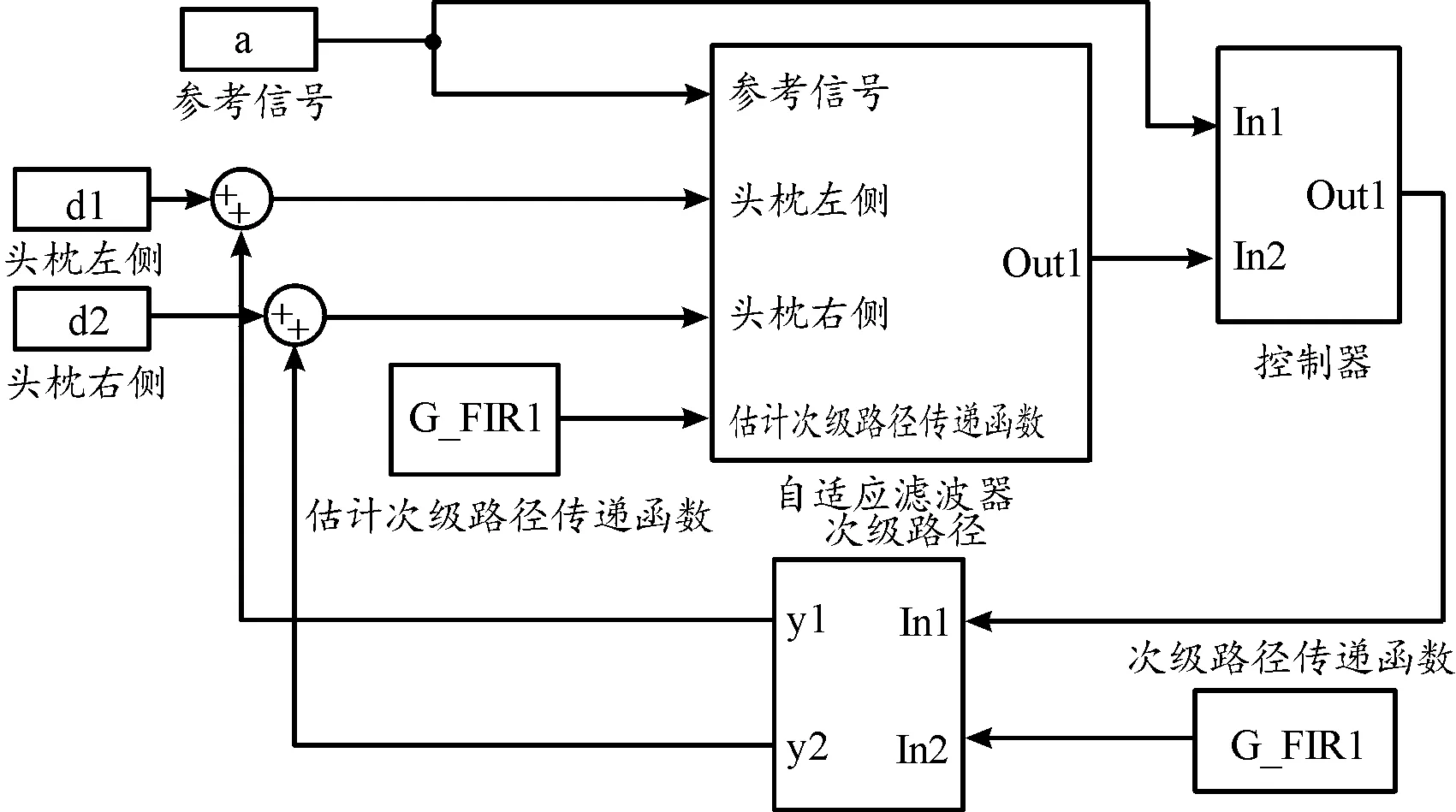
图6 汽车RANC系统仿真模型框图
在仿真过程中,将试验数据通过Matlab中的resample函数进行离线重采样,采样频率设定为2 000 Hz,采样点设定为120 000,设定仿真时间为60 s,其中,控制滤波器为128抽头数的FIR滤波器,仿真模型中输入信号为选取的振动参考信号和后排头枕处的被控噪声信号,输出是头枕处扬声器发出的次级信号。
选取20~400 Hz的频带范围计算多通道RANC系统的降噪量ΔdB以衡量降噪效果,计算公式如下:
(14)
式中:x和z分别表示多通道RANC系统降噪前后的声压级;n表示频带长度。
由图7、8可知,在80 km/h工况下的20~400 Hz频带范围内,使用原始多重相干法寻优出的参考信号组合,系统的平均降噪量为2.9 dB(A),在频率为210 Hz处的峰值降噪量为12 dB(A);在使用优化后的多重相干法寻优出的参考信号组合,系统的平均降噪量可达到3.7 dB(A),在频率为210 Hz处的峰值降噪量14.2 dB(A);在120 km/h工况下的20~400 Hz的频带范围内,使用原始多重相干法寻优出的参考信号组合,系统的平均降噪量为1.6 dB(A),而使用优化后的多重相干法寻优出的参考信号组合,系统的降噪量可达到2.7 dB(A),降噪效果明显提高。由此验证了使用结合OTPA技术的多重相干法寻优出的参考信号组合要比原方法更加准确,达到了更好的降噪效果。

图7 80 km/h工况下后排头枕处降噪效果

图8 120 km/h工况下后排头枕处降噪效果
5 结论
1) 阐述了OTPA技术原理和消除干扰信号的方法,创建了源-路径-贡献模型,在计算输入输出信号的功率谱后,采用中值奇异值选取法对载荷矩阵进行置零处理,并求得不同路径的传递函数,分解出路面结构噪声信号和残余噪声信号。
2) 阐述了多重相干的基本原理,在OTPA技术对原始噪声信号分解的基础上,计算参考信号与被控噪声信号的多重相干系数,进而寻优出与被控噪声相干性较好的参考信号组合。
3) 结合OTPA技术的多重相干法比原多重相干法寻优出的参考信号组合要更加准确,可使路噪主动控制系统的降噪效果更好,平均降噪量约可达3 dB(A),局部频段可达8~15 dB(A),为汽车路噪主动控制的参考信号选取提供了一种可参考的优化方法。
猜你喜欢
水上消防(2022年2期)2022-07-22
中南大学学报(自然科学版)(2022年5期)2022-06-26
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
北京航空航天大学学报(2020年3期)2021-01-14
环球时报(2020-08-11)2020-08-11
劳动保护(2019年3期)2019-05-16
饮食科学(2016年7期)2016-07-27
现代电子技术(2009年13期)2009-08-31
