
基于OBE的移动机器人控制虚拟仿真实验建设
2021-12-15 08:33武晓莉周乐介婧刘薇
科教导刊 2021年32期
武晓莉 周乐 介婧 刘薇
摘 要 虚拟仿真实验是实验教学改革的有效途径。智能仓储移动机器人控制是智能控制的典型应用,在OBE理念指导下将其开发为虚拟仿真实验。该虚拟仿真实验包括6个实验模块,15个实验步骤。丰富的实验内容能激发学生的学习兴趣,有助于开展自主探究式学习。实验主题的选取契合行业发展需求,符合专业培养目标;实验内容的设计能有效支撑所属智能控制课程支持的毕业要求;实验实施过程强调了知识学习、能力培养、素质培养三位一体。
关键词 虚拟仿真实验;OBE;移动机器人;智能控制;智能仓储
中图分类号:TP242 文献标识码:A DOI:10.16400/j.cnki.kjdk.2021.32.009
Construction of Virtual Simulation Experiment of Mobile Robot
Control Based on OBE Concept
WU Xiaoli, ZHOU Le, JIE Jing, LIU Wei
(School of Automation and Electrical Engineering, Zhejiang University of Science and Technology,
Zhejiang, Hangzhou 310023)
Abstract Virtual simulation experiment is an effective way for the experimental teaching reform. Intelligent warehouse mobile robot control is a typical application of intelligent control, which is developed as a virtual simulation experiment under the guidance of the OBE concept. The virtual simulation experiment includes 6 modules and 15 steps. Abundant experimental content can stimulate students' interest, and is helpful for self-inquiry learning. The selection of the experiment theme meets the needs of the industry development and the educational objectives; the design of the experiment content can effectively support the graduation requirements supported by the intelligent control course; the experiment implementation process emphasizes the trinity of knowledge learning, ability training, and quality cultivation.
Keywords virtual simulation experiment; OBE; mobile robot; intelligent control; intelligent warehousing
引言
教育部《关于2017-2020年开展示范性虚拟仿真实验教学项目建设的通知》和2018年《关于开展国家虚拟仿真实验教学项目建设工作的通知》,明確提出建设示范性虚拟仿真实验教学项目,推动高校积极探索线上线下教学相结合的实验教学新模式,重点解决真实实验项目条件不具备或实际运行困难、高成本、大型综合训练等问题。[1]2019年教育部《关于一流本科课程建设的实施意见》,提出实施一流本科课程“双万计划”,其中要认定的五类课程就包括虚拟仿真实验教学一流课程。[2]开展虚拟仿真实验教学项目建设,可以拓展实验教学内容广度和深度、延伸实验教学时间和空间、提升实验教学质量和水平,特别是对疫情期间“停课不停学”的线上实验教学可提供有效保障。
尽管自动化专业类的虚拟仿真实验教学项目2020年才在教育部的规划中被首次列入,我校自动化专业及早认识到虚拟仿真实验的重要意义,开展了相关建设工作,于2019年设计开发了智能仓储移动机器人控制虚拟仿真实验,并获批浙江省“十三五”高校虚拟仿真实验教学项目。该实验属于智能控制课程的课内实验。移动机器人,又称为AGV(Automated Guided Vehicle),其进行自主分拣投递货物的控制技术是目前智能仓储高效运行的核心技术内容,也是智能控制理论及方法的一个典型应用场景。本实验教学项目以菜鸟速递某管理区总部的智能仓储AGV分拣投递系统为模拟原型,结合专业培养发展方向,融合智能控制课程内容,面向学生开发了虚拟仿真实验。
在该虚拟仿真实验设计开发和持续建设过程中,始终秉承OBE(Outcome-based Education)的教学理念。OBE,即产出导向教育,亦称成果导向教育、目标导向教育、能力导向教育或需求导向教育,是工程教育专业认证的三大理念之一,指教学设计和教学实施都以学生通过教育过程所取得的学习成果为目标。[3]OBE遵循反向设计、正向实施的原则,以最终学习成果目标为导向,反向进行课程设计,开展教学活动。[4]智能仓储移动机器人控制虚拟仿真实验从实验主题选取、内容设计到教学实施都贯彻了OBE的理念。
1 虚拟仿真实验建设背景及必要性
1.1 背景需求
我校为应用型高校,地处物流业发达的地区。近年随着智能物流、智能仓储的大发展,国内移动机器人产业表现出高速增长态势,[5,6]人才需求量巨大。移动机器人控制技术已成为控制与人工智能学科交叉的研究前沿和应用热点。以需求为导向,在工程教育专业认证标准框架下,我校自动化专业修订了更符合学校定位、适应社会经济发展需要的培养目标,主要定位于为移动机器人、工业自动化等重要领域培养人才。
根据OBE的反向设计原则,依据培养目标设定毕业要求进而设置课程,需要课程体系涵盖控制理论、人工智能、机器人等领域知识。本虚拟仿真实验所属的智能控制课程,是自动化专业的一门重要专业课,其课程内容与人工智能学科知识交叉性强。在虚拟仿真实验建设之初,经过走访校友和机器人生产企业、进行调研和对比分析,最终选取了结合智能仓储分拣投递应用的移动机器人控制作为仿真对象,主要依据就是该主题内容依托的真实项目背景,体现了区域特色与产业优势,契合当下信息、物流和机器人产业发展的需求。实验主题的选取体现了OBE的理念。
1.2 虚拟仿真的必要性
智能仓储分拣投递系统的场地动辄上千平方米,几十甚至几百台AGV,不算辅助的大型设备,单每台AGV的价格就达万元。真实项目所需的场地大、设备多且贵。现场一般不对外开放,学生要进入现场进行学习会干扰系统工作,安全隐患大,因此只能远观,无法在现场进行各种实验验证。并且真实项目设备硬件固定,升级换代难,多用于观察认知,很难在其系统上调试各种智能控制方法。
在传统的智能控制课程教学中,实验环节一般采用MATLAB编程进行算法实现、调试和验证,形式较枯燥,实验题材有局限。受经费和场地等现实条件所限,对于移动机器人仅能提供少量实体用于认知学习,难以构建多AGV协同运行的应用场景及其所需的硬件设备,缺乏实物感和现场感。而虚拟仿真实验在三维虚拟空间完成场景搭建及设备建模,还原度高,再现性好,有利于更好地激发学生学习兴趣;开发好后可无限次重复实验,运行费用低;实验灵活度高,可设置不同模型及参数,获得不同仿真结果,便于深入理解和对比分析各种智能控制方法;软件扩展性好,可根据需求与时俱进更新实验内容。因此,建设虚拟仿真形式的新型智能控制实验势在必行。
2 虚拟仿真实验内容设计与开发
智能仓储环境下的移动机器人分拣投递是个大系统,在设计虚拟仿真实验内容时,可选的原始素材很多。如何对诸多素材进行精选取舍、加工创造,使实验展现丰富有特色的内容、满足课程需求、获得良好的教学效果,需要有正确的教学理念指引。根据OBE的反向设计原则,鉴于实验所属课程支撑的毕业要求指标点重点在于对自动化领域复杂工程问题进行分析和研究,因此实验内容的设计需要能呈现出依据工程科学原理进行问题分析、方法设计、数据解释及获得有效结论的过程。为此,将移动机器人控制所需的工程科学原理(即智能控制课程中的模糊控制、专家系统、智能优化等方法[7])与实验内容有机融合,并对实验步骤进行设计,突出了分析研究求解问题的过程。经过反复调整,最终设计了系统学习、AGV运动控制、AGV智能路径规划、多AGV协同调度、故障与处理、考核与评价六大实验模块,15个实验步骤,具体在下文展开介绍。
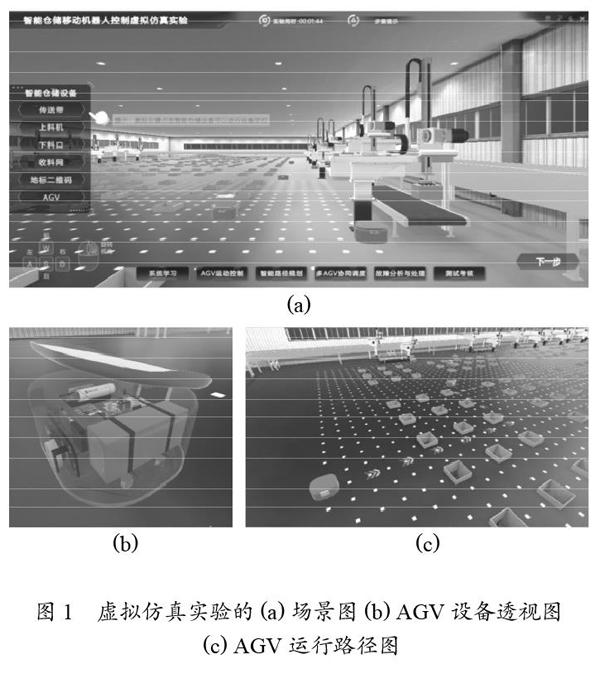
实验软件的开发环境是基于Unity 3D、Maya和Visual Studio平台,仿真软件为本校与第三方公司合作开发,由学校和公司共同提供上线服务和维护,学校具有完全自主知识产权。开发好的实验软件保存在云端,教师、学生无须安装任何插件就可以通过常规浏览器基于Web访问方式使用本实验项目。开发的虚拟仿真实验场景与AGV设备透视图和运行路径见图1。
2.1 系统学习模块
本模块包括智能仓储场景学习、AGV结构学习及装配、AGV功能演示三个步骤。
在场景学习中,实验者以3D场景漫游的方式,对实验中采用的智能物流分拣系统中的各项主要设备及功能进行快速了解,包括传送带、上料机、下料口、收料网、地标二维码、AGV。
在AGV结构装配中,实验者结合移动机器人实物,对实验中用到的设备内部结构和模块功能进行知识再现,并在3D场景中完成装配一台AGV。
在AGV功能演示中,实验者以3D方式观察和熟悉AGV的各项功能,包括行走转向、二维码导航、投递包裹、自动充电。
2.2 AGV运动控制模块
本模块包括AGV循迹模糊控制、避障运动控制两个步骤。
在循迹模糊控制中,实验者需要针对AGV运行中由于滚轮磨损失衡等常见原因造成的循迹偏移问题,设计模糊控制参数及规则,以完成AGV运行中自动纠偏,使其能按设定路径正常循迹运行。
在避障运动控制中,实验者需要针对AGV运行中常见的避让其他正常行驶的AGV现象,设计模糊控制参数及规则,以完成AGV运行中自动避障的功能。
2.3 AGV智能路径规划模块
本模块包括静态路径规划参数配置、路径规划算法对比分析、AGV实时路径规划三个步骤。
在静态路径规划参数配置中,實验者需要针对AGV及携带的包裹任务,自由设置不同上料机位和投料口,并自由选取两种路径规划算法中的一种进行路径规划,设置该算法的参数,包括距离公式选择、平滑度权重参数、AGV运行速度参数等。
在路径规划算法对比分析中,实验者需要采用第二种路径规划算法进行路径规划。设置该算法的参数。为保证算法可比性,默认第二种算法的各项参数选择与第一种算法相同。实验者需要对两种路径规划算法的效果进行比较和分析。
在AGV实时路径规划中,实验者需要针对AGV运行途中有可能遇到持久的障碍物,比如掉落的包裹等情况,自主设置持久障碍物出现的位置,以测试AGV在该情况下避障后重新进行自主路径规划的表现。
2.4 多AGV协同调度模块
本模块包括协同调度场景配置、多AGV协同运行、多AGV人工调度、多AGV智能调度四个步骤。
在协同调度场景配置中,实验者需要针对多个包裹任务、多AGV分拣投递协同工作的场景进行自由配置。配置参数包括:包裹的目标投放点坐标信息、上料机位选择、包裹分配数量、AGV分配方式。配置结果直接影响后续仿真运行结果。
在多AGV协同运行中,实验者需要针对前一步骤设置好的包裹分拣任务及设备配置,运行多AGV进行协同工作,考核指标为完成任务的时间代价性能指标。如果性能指标不理想,需要返回前述步骤进行重新参数配置,并再次观察运行效果。
在多AGV人工调度中,实验者需要针对同样的分拣任务及设备配置,进行运行中的人工调度,即人工自由选择重新安排和设置已完成当前上料机位任务的AGV的工作参数,使其去支援其他尚未完成任务的上料机位。实验者需要观察在当前人工调度策略下完成任务的时间代价性能指标的改善情况。如改善情况不理想,可以重新进行人工调度。
在多AGV智能调度中,实验者需要针对同样的分拣任务及设备配置,进行运行中的智能调度,即根据算法智能安排和设置已完成当前上料机位任务的AGV的参数,使其去支援其他没有完成任务的上料机位。并统计协同运行、人工调度、智能调度三种模式下的时间代价性能指标进行对比分析。
2.5 故障与处理模块
本模块中设计了智能仓储多AGV分拣系统中常见的几种故障,包括多台AGV锁死、行驶过程中电池报警、包裹丢失等,需要实验者对突发故障进行及时鉴别分析及处理,避免雪崩效应,保障系统流畅运行。
2.6 考核与评价
本模块包括测试考核、确认实验结果生成实验记录、成绩反馈及建议。设计有与本实验有关的智能控制算法知识测试,实验者完成测试,并确认之前的各项实验结果数据后点击提交,系统将自动生成实验记录。其中确认实验结果时,如认为之前某些步骤的实验结果不理想可返回重做。退出实验系统前设置有收集实验者的反馈建议环节。教师根据考核量规表和实验过程数据记录及学生的实验分析报告,给出考核成绩并反馈给学生,提示实验中的错误或可提升之处。
3 虚拟仿真实验教学实施
基于OBE理念的教学强调学生学到了什么而不是教师教了什么,为此在虚拟仿真实验正向教学实施中,构建了知识 能力 素质三位一体的教学模式,以保证实验教学能达成课程目标进而能支持毕业要求。
知识学习层面:通过虚拟仿真实验,学生可掌握智能仓储分拣系统以及自主移动机器人的设备、结构和功能等基本知识,并通过实验中多种智能控制方法在AGV运动控制、路径规划及协同工作中的运用,掌握各种相关智能控制方法的原理和应用。
能力培养层面:通过实验中对多种智能控制方法的不同参数及模型的自由设置和搭建,获得不同的仿真效果,这种多因素影响没有唯一解的复杂工程问题,可促使学生进行反复实验对比和分析,实现以学生为中心的自主探究式学习,使学生对智能控制的实际应用,从传统认知教学的“感”,上升到“悟”的阶段。实验过程能有效培养学生对实际问题进行抽象和求解、对数据进行整理和分析、对影响因素进行解释、优选设计方案并获得有效结论的能力。
素质培养层面:本虚拟仿真实验的开设,在前期学校所在地的知名机器人企业项目现场认知实习基础上进行,并结合AGV实物进行结构学习,虚实结合,双管齐下,深化学生对我国自动化工程领域趋势和热点特别是机器人产业的了解,强化学生對“中国智造”和“工匠精神”的认知,厚植爱国情怀,增强学生的社会责任感。
目前该虚拟仿真实验系统已实施运行两年,在教学过程中,通过内容丰富的虚拟仿真实验改变了传统单一的实验方式,激发了学生的自主学习兴趣,学生实验时间地点更自由,愿意花更多的时间进行探究式学习,能更充分地发掘学生的创造潜能;虚拟仿真实验与实物现场认识实习虚实结合相互补充,形成认识实习—理论课—虚拟仿真实验的学习链,有效助力培养学生运用理论知识分析和研究自动化领域复杂工程问题的能力。
4 结论
为改革实验教学,选取菜鸟速递某管理区总部的智能仓储移动机器人分拣投递系统开发为虚拟仿真实验。以三维仿真的方式,模拟实际现场环境和设备运行状态,提供模型及控制参数选择,供学生对此智能控制典型应用场景展开问题分析、方法设计和方案研究。OBE理念贯穿了虚拟仿真实验的建设过程,确保了虚拟仿真实验支撑课程目标毕业要求、符合专业培养方向定位。
通讯作者:武晓莉
基金项目:2019年浙江省“十三五”高校虚拟仿真实验教学项目:智能仓储移动机器人控制虚拟仿真实验教学项目;浙江省高等教育“十三五”第二批教学改革研究项目(JG20190310,JG20190315)
参考文献
[1] 熊宏齐.虚拟仿真实验教学助推理论教学与实验教学的融合改革与创新[J].实验技术与管理,2020,37(05):1-4+16.
[2] 教育部.教育部关于一流本科课程建设的实施意见[J].中华人民共和国国务院公报,2020,(05):57-62.
[3] 林峰,史恒.基于OBE理念的“无线网络规划与优化”课程改革与研究[J].科教导刊,2021,(05):55-56.
[4] 程海雨,李擎,李希胜,等.基于工程教育专业认证理念的招生-培养-就业联动机制探索与实践——以北京科技大学自动化学院为例[J].科教导刊,2021,(17):47-49.
[5] 马梦良.深化技术革新提升智能化整体水平[J].现代制造,2020,(09):7.
[6] 马荣.浙江省移动机器人发展现状问题及政策建议[J].科技创新导报,2020,17(18):246-247.
[7] 刘金琨.智能控制(第4版)[M].北京:电子工业出版社,2017.
猜你喜欢
设计(2020年24期)2020-01-25
现代职业教育·中职中专(2018年11期)2018-06-11
青春岁月(2017年3期)2017-03-31
电子技术与软件工程(2016年20期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
求知导刊(2016年30期)2016-12-03
电脑知识与技术(2016年25期)2016-11-16
商业会计(2016年17期)2016-11-09
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
