
基于模型预测控制的汽车自适应巡航分层控制
2021-12-17 15:24苑风霞张华陈丰司志远
淮北师范大学学报(自然科学版) 2021年4期
苑风霞,张华,陈丰,司志远
(安徽科技学院 机械工程学院,安徽 凤阳 233100)
0 引言
纵向运动控制是现代汽车运动控制的核心组成部分,其最主要的应用之一是汽车的巡航系统[1],由于巡航系统涉及到汽车不同系统之间的协调工作,比如驱动系统、制动系统等,要获得良好的巡航性能,必须设计具备良好性能的巡航控制器或控制方法.
针对汽车的巡航控制问题,国内外进行大量的研究,并且设计多种汽车巡航控制器或控制方法,Pradhan等[2]基于伯德最优传递函数设计PID自适应巡航控制器,在保证控制器鲁棒性的基础上,将巡航控制转化成最优控制问题.Kim等[3]设计一种具有时变参数的自适应控制器用于汽车节气门和制动器的控制,实现汽车速度跟踪控制.Naranjo等[4]基于模糊理论,设计一种具备停走功能的自适应巡航控制器.Kim等[5]设计一种模型参考自适应巡航控制器,并结合学习算法减少车辆参数的不确定性对控制器的影响.Ganji等[6]利用滑模控制方法,为混合动力汽车设计一种自适应巡航控制器.郭景华等[7]采用模糊多滑模控制策略控制油门和制动,实现无人驾驶车辆车速跟踪控制.李亚勇等[8]利用新型人工势场理论,设计一种考虑前后方车辆行驶状态的自适应巡航控制方法,提高拥挤工况下车辆的通行效率和道路利用率.Luo等[9]基于模型预测控制理论设计一种多目标自适应巡航控制系统.Jiang等[10]和刘西等[11]基于模型预测控制理论研究车辆自适应巡航控制系统的分层控制方法.张亮修等[12]应用模型匹配控制理论和线性二次最优控制理论设计车辆自适应巡航系统的分层控制器.
本文以电动汽车为研究对象,设计一种电动汽车自适应巡航分层控制器[13],其中上层控制器为模型预测控制器,下层控制器通过驱动/制动切换逻辑确定起作用的车辆系统(驱动系统(轮毂电机)/制动系统),并根据车辆逆纵向动力学模型计算所需的驱动/制动力,通过等速+等加速+等减速和等速+变加速+变减速2种工况的仿真验证所设计控制器的有效性.
1 系统模型
1.1 车辆巡航系统模型
图1为车辆巡航示意图,vr、ar分别表示巡航车辆的速度和加速度,vf、af分别表示目标车辆的速度和加速度,Δxr为两车之间的实际车距,Δxd表示两车之间的目标车距,e表示实际车距和目标车距之间的偏差,vrelative表示两车的相对速度.

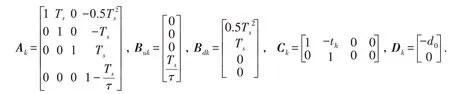
考虑下层控制器的延时τ,根据一阶自适应巡航控制模型[14],可得离散时间的巡航车辆加速度控制表达式

式中,u(k)为上层控制器的输入;Ts为采样时间.

式中,
1.2 车辆纵向动力学模型
忽略轮胎滑移率的影响,车辆纵向动力学模型[15]为

式中:δ为车辆旋转质量换算系数;m为车辆质量;ax为车辆的加速度;Tw为驱动轮的输出转矩;R为驱动轮的滚动半径,α为道路的坡度;f1和f2为车辆的滚动阻力系数;vx为车辆的纵向速度;Cd为车辆的空气阻力系数;A为车辆的迎风面积;ρ为空气的密度.
1.3 车辆驱动系统-轮毂电机模型
电动汽车采用轮毂电机驱动模式,根据其工作原理,其三相绕组的电压平衡方程式、电机的转矩以及机械运动方程式[16]可表示为:

式中,U为电枢电压;I为电枢电流;R为电枢电阻;L电枢电感;E为电机的反电动势;kE为电压常数;Te为电机电磁转矩;Jm电机转动惯量;θm为电机转角;TL电机输出转矩.
1.4 车辆制动系统模型
电动汽车普遍采用液压-钳盘式制动系统,其模型主要包括液压传动系统和钳盘式制动器2部分[17],如式(7)所示.式(7a)是液压传动系统的传递函数,式(7b)为制动器模型.

式中,kp为增益系数,σ为时间常数,Tb为制动器力矩,Kf为制动器的制动因数,P为制动压力.
2 控制器设计
2.1 上层控制器设计
上层控制器的作用是根据巡航车辆和目标车辆的车速及其变化情况以及两者之间的相对距离、相对速度,同时在考虑安全的基础上,计算对巡航车辆的加速/减速需求,并将其输出给下层控制器.设定ε(k+1)=[x(k),u(k-1)]T,得到新的车辆巡航控制状态方程[18-19],

式中:

假设系统的模型预测控制器的预测时域为Np,控制时域为Nc,当前时间设为k,则预测时域内的状态量和系统的输出量可依次表示为

式中:
系统的输出为

式中:

由于系统模型的时变性,目标函数定义为

将式(10)转化成二次规划问题

式中,Q和R为权重系数矩阵.
约束条件:
控制量输入约束:

加速度输入约束:

速度约束:

安全距离约束:

2.2 下层控制器设计
下层控制器的作用是接受上层控制器计算的需求加/减速度,确定起作用的车辆系统(驱动系统(轮毂电机)/制动系统),并根据车辆逆纵向动力学模型计算所需的驱动/制动力,然后传给车辆的驱动系统(轮毂电机)/制动系统,使其产生所需的驱动/制动力,从而改变巡航车辆的行驶状态.下层控制器根据上层控制器输出的需求加速/减速度确定车辆系统的工作原理:
(1)根据数值的正负来区分是加速度或减速度需求;
(2)如果是加速度需求,则确定车辆的驱动系统(轮毂电机)工作-增大驱动转矩;
(3)如果是减速度需求,则计算当前车速下的车辆滑行减速度,并判断需求减速度与车辆滑行减速度的(绝对值)大小关系;
(4)如果需求减速度小于车辆滑行减速度,则确定车辆的驱动系统(轮毂电机)工作-减小驱动转矩;
(5)如果需求减速度大于车辆滑行减速度,则确定车辆的制动系统工作-产生制动力.
2.3 车辆驱动系统(轮毂电机)控制器
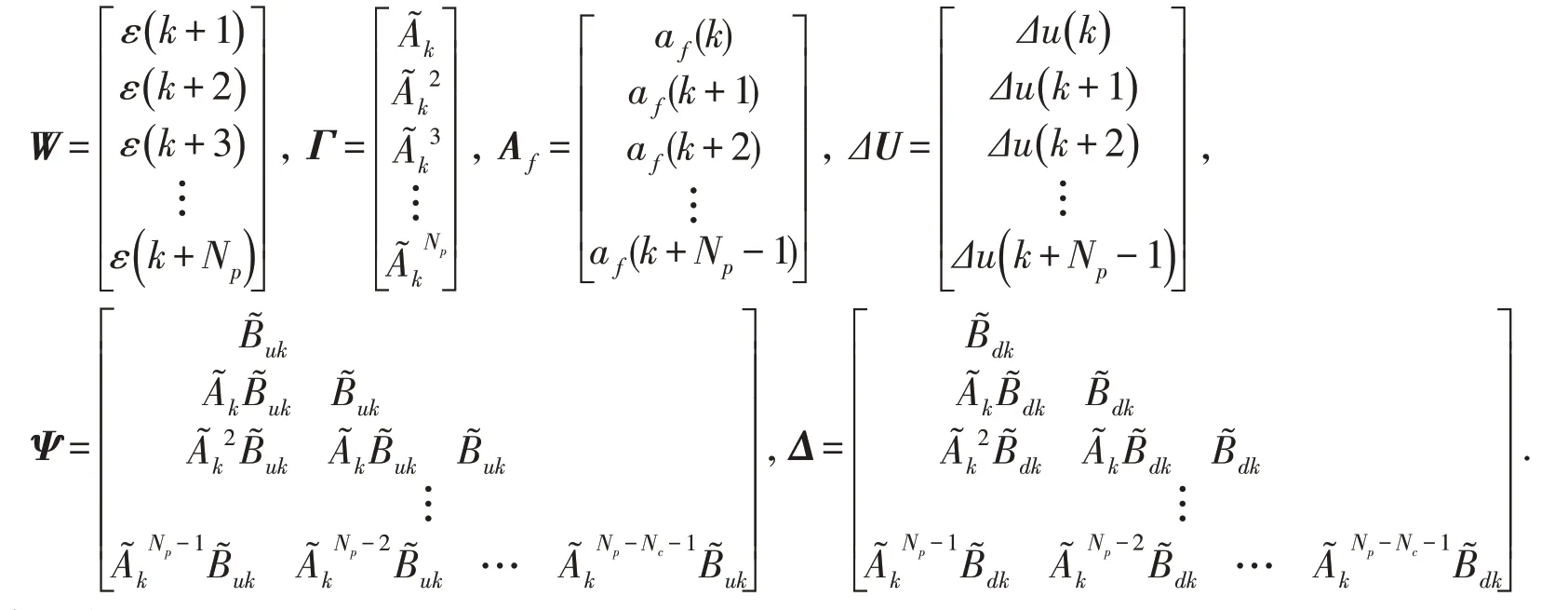
车辆驱动系统(轮毂电机)控制器的作用是根据下层控制器的要求,控制车辆驱动系统(轮毂电机)输出驱动转矩,使车辆产生所需的加速/减速度.图2所示为车辆驱动系统(轮毂电机)控制器,该控制器包括转矩控制器和电流控制器,且都为PID控制器.图2中ki为电流反馈系数,ka为转矩(车辆加速度)反馈系数,kω为车轮中心速度与角速度转化系数.
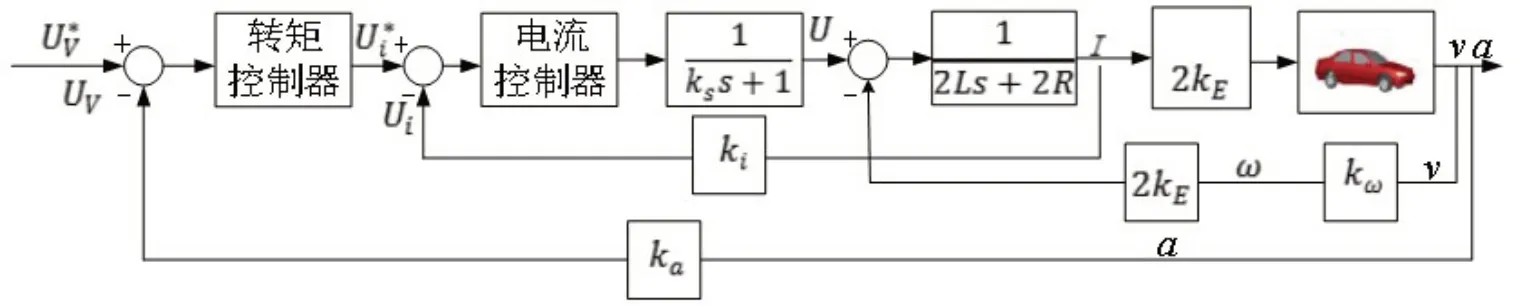
图2 车辆驱动系统(轮毂电机)控制器
2.4 车辆制动系统控制器
车辆制动系统控制器的作用是根据下层控制器的要求,控制制动系统输出制动力,使车辆产生所需的减速度.对于液压制动系统,其制动力控制是通过控制液压管路的压力,从而改变制动压力实现的.为简化模型,本文通过建立制动压力(主缸)和制动减速度之间的关系实现对车辆制动系统的控制.

式中:a为车辆的减速度,P为制动压力(主缸),k1、k2、k3均为常数.
3 车辆巡航系统仿真
3.1 仿真模型的建立
为验证所设计的自适应巡航分层控制器的控制效果,结合MATLAB/Simulink[20]和Carsim[21]软件建立车辆巡航系统仿真模型,具体是在MATLAB/Simulink中建立自适应巡航分层控制器及驱动/制动系统控制器(执行器控制器),并且将Carsim软件中的车辆模型导入MATLAB/Simulink,图3所示为车辆巡航系统仿真模型.
图3 车辆巡航系统仿真模型
3.2 仿真工况及结果
针对所建立的车辆巡航系统仿真模型,设置2种仿真工况:(1)等速+等加速+等减速工况;(2)等速+变加速+变减速工况,根据仿真结果分析自适应巡航分层控制器的性能.
等速+等加速+等减速工况由8个等速阶段、3个等加速阶段和4个等减速阶段组成:等速阶段的车速分别为40 km/h(4个阶段)、50 km/h(1个阶段)、60 km/h(2个阶段)和70 km/h(1个阶段);等加速阶段的加速度分别为2.33 m/s2、1.657 m/s2和1.195 m/s2;等减速阶段的减速度分别为-1.86 m/s2、-1.808 m/s2、-1.165 m/s2和-1.812 m/s2.巡航车辆的初速为40 km/h,距离目标车辆10 m.图4、图5分别为等速+等加速+等减速工况下,巡航车辆和目标车辆车速、相对距离随时间的变化情况.从图4可以看出,在巡航开始阶段,巡航车辆先从40 km/h迅速减速到31 km/h,然后再加速到40 km/h,并且在这个加速过程中,加速度逐渐减小.结合图5所示结果,在巡航开始阶段,巡航车辆减速是因为目标车辆和巡航车辆相对距离(10 m)小于该车速下的目标车距(16.67 m),通过较大减速度使两车距离快速达到目标车距,然后通过加速度逐渐减小的加速过程更精确地达到目标车辆的车速.经过巡航初始阶段后,巡航车辆能够准确地跟踪目标车辆的车速——两车车速最大相差3.25 km/h,相对值为4.56%,并且保持两车之间的目标车距——两车实际车距与目标车距相差最大值1.65 m,相对值为5.55%.图6所示为等速+等加速+等减速工况下巡航车辆的加减速度、制动压力(主缸)和驱动转矩(轮毂电机)以及目标车辆加减速度随时间的变化情况,虚线框外为驱动系统工作(驱动转矩不为零),制动系统不工作(制动压力为零)的情况,虚线框内为驱动系统与制动系统之间切换的情况,反映下层控制器的有效性,同时从整体看巡航车辆的巡航控制器、驱动系统及制动系统均能够对目标车辆的加速度变化作出准确快速的响应,以保证巡航车辆能够准确地跟踪目标车辆.总之,在等速+等加速+等减速工况下,巡航车辆能够准确地跟踪目标车辆,表明所设计自适应巡航分层控制器是有效的.

图4 等速+等加速+等减速工况下, 巡航车辆和目标车辆车速随时间的 变化情况
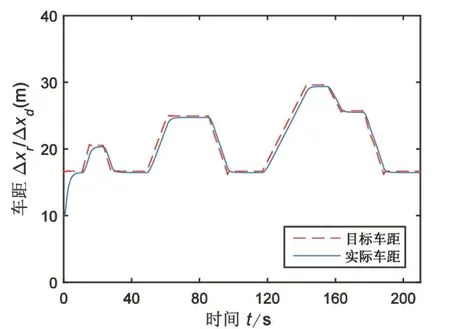
图5 等速+等加速+等减速工况下, 巡航车辆和目标车辆相对距离随时间的 变化情况
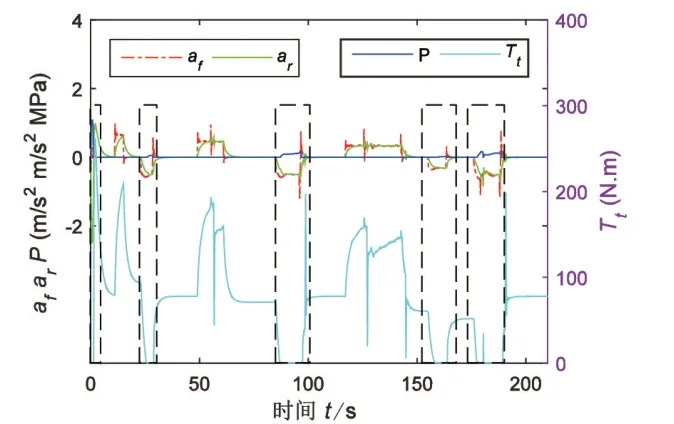
图6 等速+等加速+等减速工况下, 巡航车辆的加减速度、制动压力(主缸) 和驱动转矩(轮毂电机)以及目标车辆加减速度随时间的变化情况
等速+变加速+变减速工况由2个等速阶段和1个变加速+变减速综合阶段组成,等速阶段的车速为50 km/h;变加速+变减速综合阶段的车速为vf=50+30 sin(0.031 4t).巡航车辆的初始状态设定:(1)初速为40 km/h,距离目标车辆10 m;(2)初速为40 km/h,距离目标车辆20 m;(3)初速为30 km/h,距离目标车辆10 m.图7和图8分别为等速+变加速+变减速工况下,不同初始状态下巡航车辆和目标车辆车速、相对距离随时间的变化情况,从整体看,不同的初始车速和车间距离只影响巡航开始阶段,对巡航车辆跟踪上目标车辆后的车速和车间距离没有影响.从图7可以看出,在巡航开始阶段,初始状态(1)(初速40 km/h,车间距离10 m)的巡航车辆的车速先从40 km/h迅速下降到35.41 km/h,然后再加速到52.99 km/h,最后减速到50 km/h;初始状态(2)(初速40 km/h,车间距离20 m)的巡航车辆的车速先从40 km/h上升到55.73 km/h,然后减速到50 km/h,比初始状态(1)少1个减速环节;初始状态(3)(初速30 km/h,车间距离10 m)巡航车辆的车速先从30 km/h加速到60.15 km/h,最后减速到50 km/h;比初始状态(1)少1个减速环节.从图7可以看出,在巡航开始阶段,相比目标车距,巡航车辆的3种初始状态的车距超调量分别为6.71%(1.39 m)、16.90%(3.52 m)、39.68%(8.27 m),相比初始状态(2)和(3),初始状态1的车距超调量最小,说明增加减速环节有助于减小车距超调量.经过巡航初始阶段后,巡航车辆能够准确地跟踪目标车辆的车速——两车车速最大相差1.69 km/h,相对值为2.21%,并且保持两车之间的目标车距——两车实际车距与目标车距相差最大值0.94 m,相对值为2.82%.图9所示为等速+变加速+变减速工况下,巡航车辆(初始状态(1))的加减速度、制动压力(主缸)和驱动转矩(轮毂电机)以及目标车辆加减速度随时间的变化情况.从图9可以得出,等速+变加速+变减速工况与等速+等加速+等减速工况(图6)类似的结论.总之,在等速+变加速+变减速工况下,巡航车辆能够准确地跟踪目标车辆,表明所设计自适应巡航分层控制器是有效的.

图7 等速+变加速+变减速工况下, 巡航车辆和目标车辆车速随时间的 变化情况

图8 等速+变加速+变减速工况下, 巡航车辆和目标车辆相对距离随时间的 变化情况

图9 等速+变加速+变减速工况下, 巡航车辆的加减速度、制动压力(主缸) 和驱动转矩(轮毂电机)以及目标车辆加减速度随时间的变化情况
4 结论
本文以模型预测控制方法为基础,设计一种电动汽车自适应巡航分层控制器.通过MATLAB/Simulink和Carsim软件的联合仿真,在等速+等加速+等减速和等速+变加速+变减速2种工况下研究所设计的自适应巡航分层控制器的性能.以目标车辆车速和目标车距为标准,2种工况下的巡航车辆的车速相对误差小于5%,车距相对误差小于6%,仿真结果表明,所设计的自适应巡航分层控制器能够使巡航车辆准确地跟踪目标车辆.
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
煤气与热力(2021年12期)2022-01-19
电子制作(2019年13期)2020-01-14
莫愁·时代人物(2018年7期)2018-09-12
莫愁(2018年20期)2018-07-19
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
汽车维护与修理(2015年5期)2015-02-28
汽车技术(2014年8期)2014-07-18
筑路机械与施工机械化(2014年4期)2014-03-01
