一种双向三端口车载充电机拓扑的调制及仿真
2021-12-21 01:34贾民立
电源学报 2021年6期
贾民立,孙 浩
(台达电子企业管理(上海)有限公司,上海 201209)
车载充电机OBC(on-board charger),低压输出直流变换器LVDC(low voltage DC converter)和电机驱动器TI(traction inverter)是电动汽车的3 个主要能量变换单元,常见功率等级范围分别是3.3~22.0 kW、2.0~3.6 kW 和90~150 kW。针对三者的集成化设计,学者们先后提出了不同的实现方式[1],实际应用中,由于OBC 和LVDC 功率等级相近且有分时工作的特点,两者更容易进行集成化设计,实现形式上可分为物理集成和磁集成,其中磁集成在提高功率密度,减小体积和降低成本上更有优势,近年来深受大家的青睐。
双向三端口拓扑是从基本两端口双向DC/DC推演而来。双有源桥DAB(dual-active bridge)[2]和谐振型CLLC 拓扑是两类典型的代表并各具特点。DAB 是定频脉宽调制PWM(pulse width modulation)型控制,应用简单灵活,但软开关范围有限,尽管可以采用多重移相技术来扩展其软开关范围[3],但实现相对复杂;CLLC 是谐振型变频控制,零电压开关ZVS(zero voltage switching)开通,输出效率高,宽输出电压范围时有2 种常见实现方式:一种是通过扩展母线电压范围的方法来实现宽电压的输出,但需要选用高耐压电容,成本增加;另一种是采用对称LLC 的设计思路[4],但只能保证单方向的增益最优设计。结合以上两类电路的工作特点,文献[5]给出一种LC 串联谐振加Delay-Time(延时)控制的方法,特点是在变频控制的基础上,通过对副边开关引入延时控制形成部分短路状态,对谐振电感进行储能来提高输出电压的增益,进而实现宽范围的电压输出,特点是易于控制,非常适合车载充电应用场合应用。
三端口拓扑按照构成同样可分为PWM 定频控制型和谐振型变频控制,其解耦方法包括控制算法解耦和拓扑解耦,其中控制算法解耦[6-9]是一种常见的三端口控制方法。文献[6]在传统三端口的基础上提出一种新的控制策略来进行解耦控制,输出的动态响应得到提高,但对模型的准确度要求较高;文献[7]针对运行时出现的闲置端口提出一种虚拟控制的方法,闲置端口的工作电压得到了控制,但要引入额外的无功,增加了损耗,降低了输出效率;文献[8]采用定频的双谐振控制,同时结合移相策略来调节电压的输出,仅适用于固定电压输出的工况。文献[9]采用LCLC 多谐振结构设计,有3 个谐振频率,由于具有基频和三倍频2 个串联谐振频率,因此可以对变换器中的基频和三倍频能量进行传递,对参数设计的精度要求较高,宽输出电压范围的调节能力有待验证。拓扑解耦是一种直接的解耦[10-12]方法。文献[10-11]通过在LVDC 输出端增加不控整流+Buck 调压实现输出解耦,但不能避免OBC 在充放电模态时DAB 工作软开关范围有限的缺陷。文献[12]虽然提出采用准谐振型的方式来改善软开关的条件,但OBC 和LVDC 输出均要增加一级Buck调压电路,增加了成本和控制的复杂度。
本文基于延时控制的双向DC/DC 工作原理,通过在LVDC 增加不控整流及BUCK 调压的架构来实现三个端口的解耦,分析了该三端口OBC 拓扑在不同工作模态的控制实现方法和工作原理,特别对LVDC 独立运行时,提出一种防止BUS 电容的过压的控制方法,并对其工作原理进行了分析,最后基于实际的工况参数,对系统在边界条件下的运行进行了仿真,验证了本文所述控制方法的可行性。
1 拓扑结构及运行模态
图1 所示为双向三端口OBC 拓扑架构。图中,S1~S4为Bus 侧的开关,S5~S8为高压电池侧的开关,SR1和SR2为LVDC 侧的同步整流开关,S 和SRD 构成Buck 调压电路。Lr和Cr组成OBC 谐振网络,CB为隔直电容,NP、NS及Ns1、Ns2分别为变压器原边、变压器副边高压侧及变压器副边低压侧绕组。Bus 侧和高压侧均是可控的全桥结构拓扑,能量可以进行双向流动,LVDC 侧是不控整流+Buck 的调压模式。该架构通过拓扑解耦可以灵活实现3 个端口的功率控制。
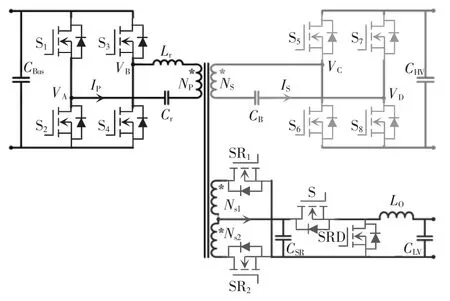
图1 双向三端口拓扑架构Fig.1 Architecture of bidirectional three-port topology
根据车辆运行工况,集成双向三端口OBC 可分为3 种运行模态,如图2 所示。图2(a)和(b)分别是车辆停止运行时的充电和放电状态,系统控制由OBC 来主导,此时LVDC 输出功率将控制在1 kW以下,其工作频率与OBC 相同;图2(c)是车辆运行时的工作状态,该状态下高压电池向低压电池供电,LVDC 是独立工作模态,最大连续输出功率为3 kW,工作于固定开关频率的PWM 控制模式。
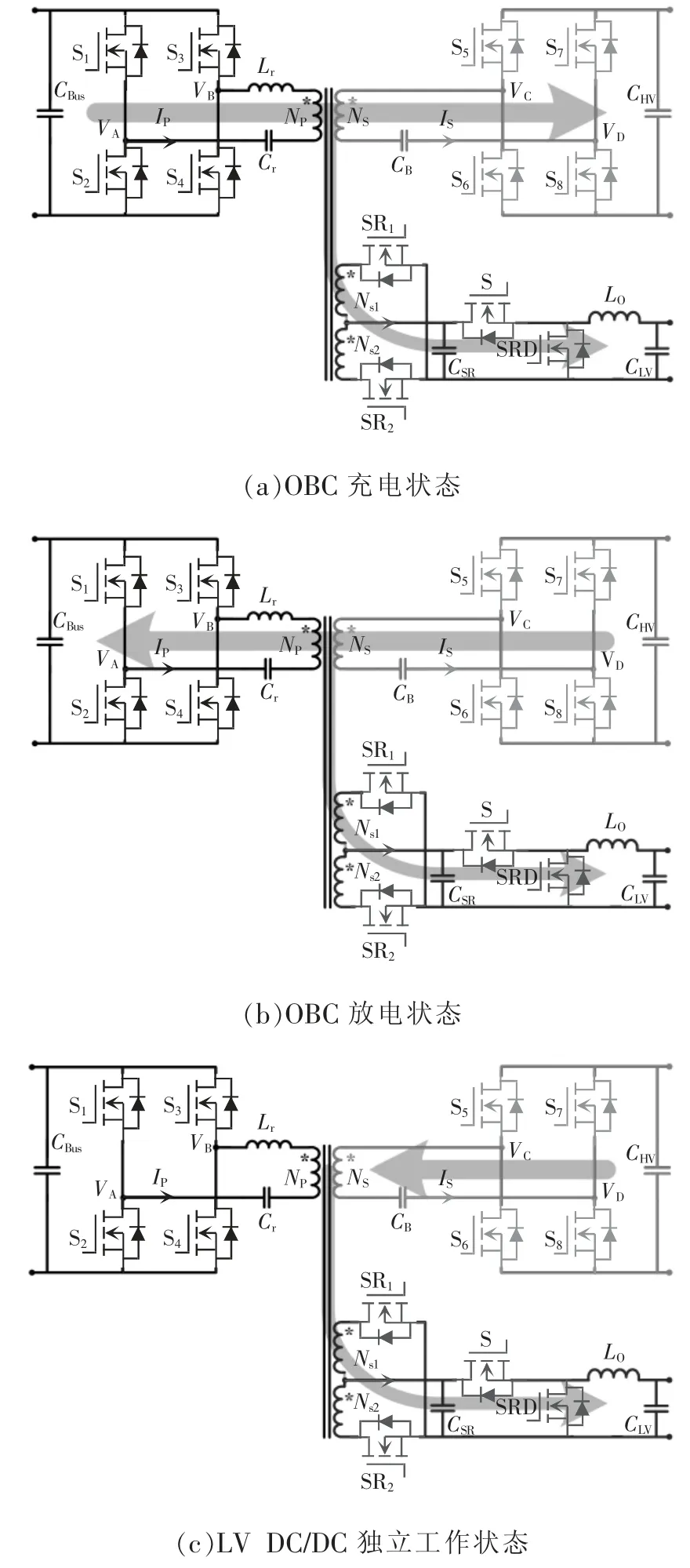
图2 双向三端口拓扑的运行模态Fig.2 Working modes of bidirectional three-port topology
2 充、放电模态的工作原理分析及设计
定义OBC 变压器的原、副边匝比为N=Ns/Np,Bus侧和高压电池侧的电压分别为VBus和VHVO,则OBC在充电状态时的增益GCH可描述为

放电时的增益GDCH为充电时GCH的倒数。为了缩小输出增益的调节范围,提升输出效率,设计采用变Bus 电压的控制策略。图3 分别给出了充电和放电时的增益调节关系曲线,可以看到,Bus 电压VBus的可调范围设定在380~420 V 时,Bus 电容耐压选用450 V 即可。
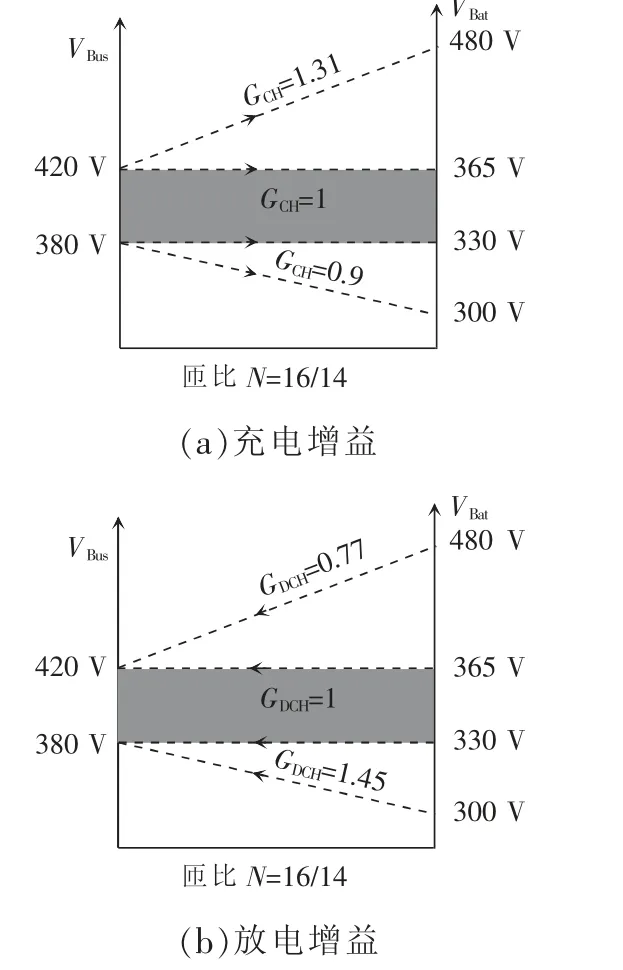
图3 双向DC/DC 拓扑充、放电增益Fig.3 Charging and discharging gains of bidirectional DC/DC topology
基于OBC 双向DC/DC 拓扑结构和工作的对称性,本文仅以充电状态为例进行相应的分析和设计说明,放电状态不再赘述。
2.1 工作原理及模态分析
结合图3 的增益曲线,当系统GCH≤1 时OBC的双向DC/DC 拓扑是传统的LC 串联谐振型,输出调节增益不大于1,通常采用变频控制。LVDC 侧的SR1和SR2跟随谐振电流进行同步整流,对电容CSR进行充电,BUCK 电路的主动开关S 根据输出能量需求进行PWM 控制。详细的控制时序如图4(a)所示,该工作模态OBC 的工作可以看作是延时控制的一个特例(延时为0),不单独阐述。
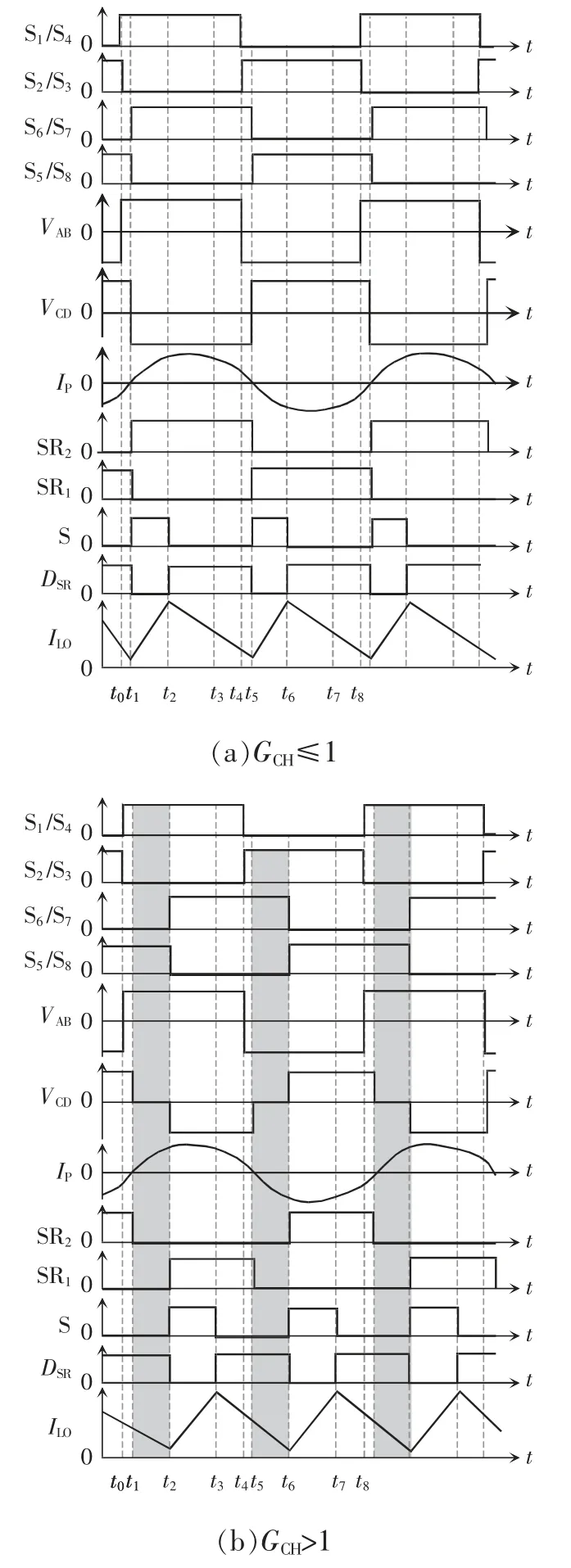
图4 双向三端口OBC 充电状态时的开关时序Fig.4 Switching timing of bidirectional three-port OBC in charging mode
当输出GCH>1 时,OBC 的双向DC/DC 采用延时控制策略,LVDC 采用BUCK 进行调压。图4(b)给出了详细的开关时序波形,忽略死区的条件下,一个开关周期内有8 个工作状态。方便起见,定义OBC 副边同步整流的桥臂为为无源桥臂,参与延时控的桥臂为有源桥臂。本文中S5/S6为无源桥臂,S7/S8为有源桥臂。基于一个开关周期内前、后半周工作的对称性,选取前半周期的4 个工作状态进行分析,各对应开关模态如图5 所示。
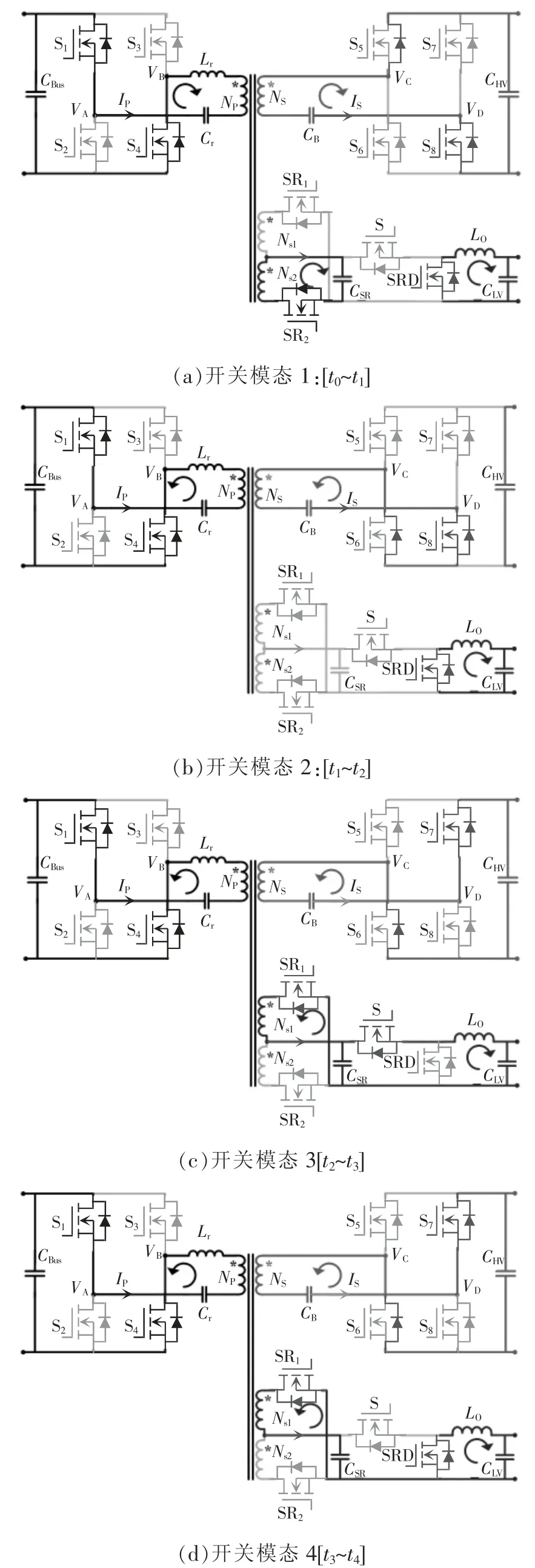
图5 三端口电路充电状态时半个开关周期的工作状态Fig.5 Working states in half switching cycle when three-port circuit is in charging mode
(1)开关状态1[t0~t1]:t0时刻,原边开关S1和S4流过负向电流,ZVS 开通。该时段,原边处于馈能阶段,副边高压侧通过开关S5的体二极管及S8进行整流输出;副边低压侧一方面通过SR2进行同步整流对电容CSR进行充电,另一方面,由于BUCK 主开关S 处于关断状态,输出电感LO中的电流通过SRD 进行续流。
(2)开关状态2[t1~t2]:t1时刻,谐振电流由负变正。该时段,开关S5的体二极管截止,S6的体二极管导通,副边谐振电流通过S6和S8短路,VCD的电压为0,VAB作为激励源对LC 组成的谐振腔进行储能,该时间定义为延时控制时间,显然该时间越长储能越多,输出增益就越高。副边低压侧绕组由于受到高压输出侧绕组电压的嵌位绕组电压为0,BUCK 电路输出电感LO上的电流持续通过SRD 进行续流。
(3)开关状态3[t2~t3]:t2时刻,开关S8关断,S7实现ZVS 开通,同时开关S 开通进行BUCK 调压控制。该时段,OBC 通过开关S6的体二极管和S7进行整流输出;副边低压输出侧绕组通过SR1进行同步整流,通过控制开关S 的导通时间来调节LVDC的输出电压。
(4)开关状态4[t3~t4]:t3时刻,BUCK 主开关S关断,OBC 输出持续对高压电池进行充电,低压侧绕组通过SR1对CSR进行充电,电感LO的电流通过开关SRD 进行续流。
2.2 等效电路分析及设计
理想状况下,忽略变压器的漏感和耦合电容,线路杂散电感及隔直电容CB 等参数的影响,充、放电模式时解耦前后的等效电路如图6 所示,其中VCD’及VLV’分别为通过匝比关系折算到原边的值。由图6(a)可知,LVDC 的输入电压直接和HVDC 的电压相关,解耦后的等效电路如图6(b)所示,可以分解成两个完全独立的的电路,可以分别进行设计。
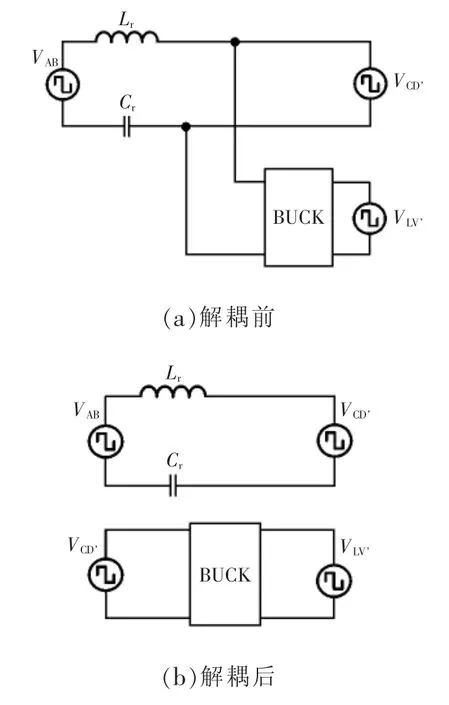
图6 充、放电模态时解耦前后的等效电路Fig.6 Equivalent circuits before and after decoupling in charging and discharging modes
解耦后的OBC 等效电路主要由激励源VAB和VCD’及谐振电感和电容构成,如何确定电感和电容值是设计的重点,通常遵循的原则是:谐振频率一定时,在保证谐振电容耐压足够的条件下,尽可能地增大谐振电感。原因是感量越大开关频率的变化范围越小,效率越高。
实际控制时,通常将延时时间转换成移相角度,表示为

式中:Ts为OBC 开关周期;tdelay为OBC 原、副边的延时控制时间。
图7 给出开关频率fs、移相角度θ 随输出电压VHVO变化的典型曲线。可以看出,开关频率呈“V”字型变化。在增益小于1 的区间,移相角度为0;增益大于1 的区间,移相角度随输出电压的升高而增大。实际控制中移相角采用开环控制,通过查表的方法来实现,频率调节通过闭环控制来实现。
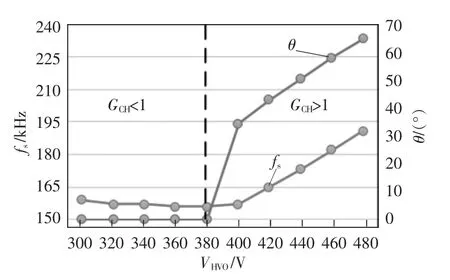
图7 fs 和移相角度θ 与输出电压VHVO 的关系Fig.7 Relationship among fs,phase shift angle θ and VHVO
LVDC 侧输入电压通过变压器耦合被高压侧的桥臂的中点电压VCD嵌位,LVDC 不控整流输出可等效为一电压源,考虑延时控制带来的占空比丢失,同步BUCK 电路的输入电容CSR的电压表达式为

LVDC 的输出电压范围通常是9~16 V。显然,若不通过BUCK 电路进行变换,LV 侧的电压是不受控制的,三端口工作是非解耦的。若定义BUCK 控制的占空比是D,则最终LVDC 的输出电压VLV为

3 车辆运行模式下的工作原理及设计
3.1 工作原理及模态分析
图2(c)为车辆运行中,通过能量转换将高压电池的能量传送给车内的低压电池及其他供电设备,此时OBC 停止工作。该模态下,需要解决的主要问题是:要避免原边出现过电压,防止Bus 电容及开关器件的损坏。基于此,本文提出短路原边的控制策略,实现上可以有多种形式,比如保持S1和S3常通,或者S2和S4常通,或者S1~S4常通等形式,这里仅以控制S2和S4保持常通状态为例进行说明。
当原边的桥臂中点A 和B 短路后,此时L 和C组成的串联谐振腔和变压器原边绕组并联,为了保证谐振腔成感性,开关频率设定在谐振频率的2 倍以上,LVDC 的输出电压通过高压HV 侧的移相来控制,BUCK 电路不工作,图8 为该模态下的开关控制时序。同样只对半个开关周期的开关动作进行分析,开关模态如图9 所示。
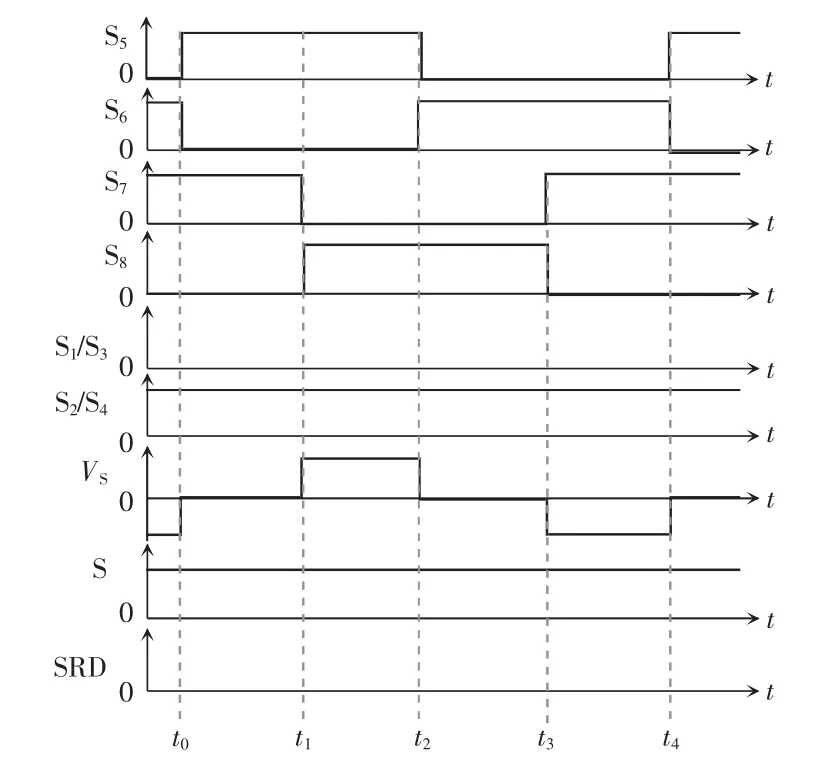
图8 LVDC 独立运行时的开关时序Fig.8 Switching timing when LVDC runs independently
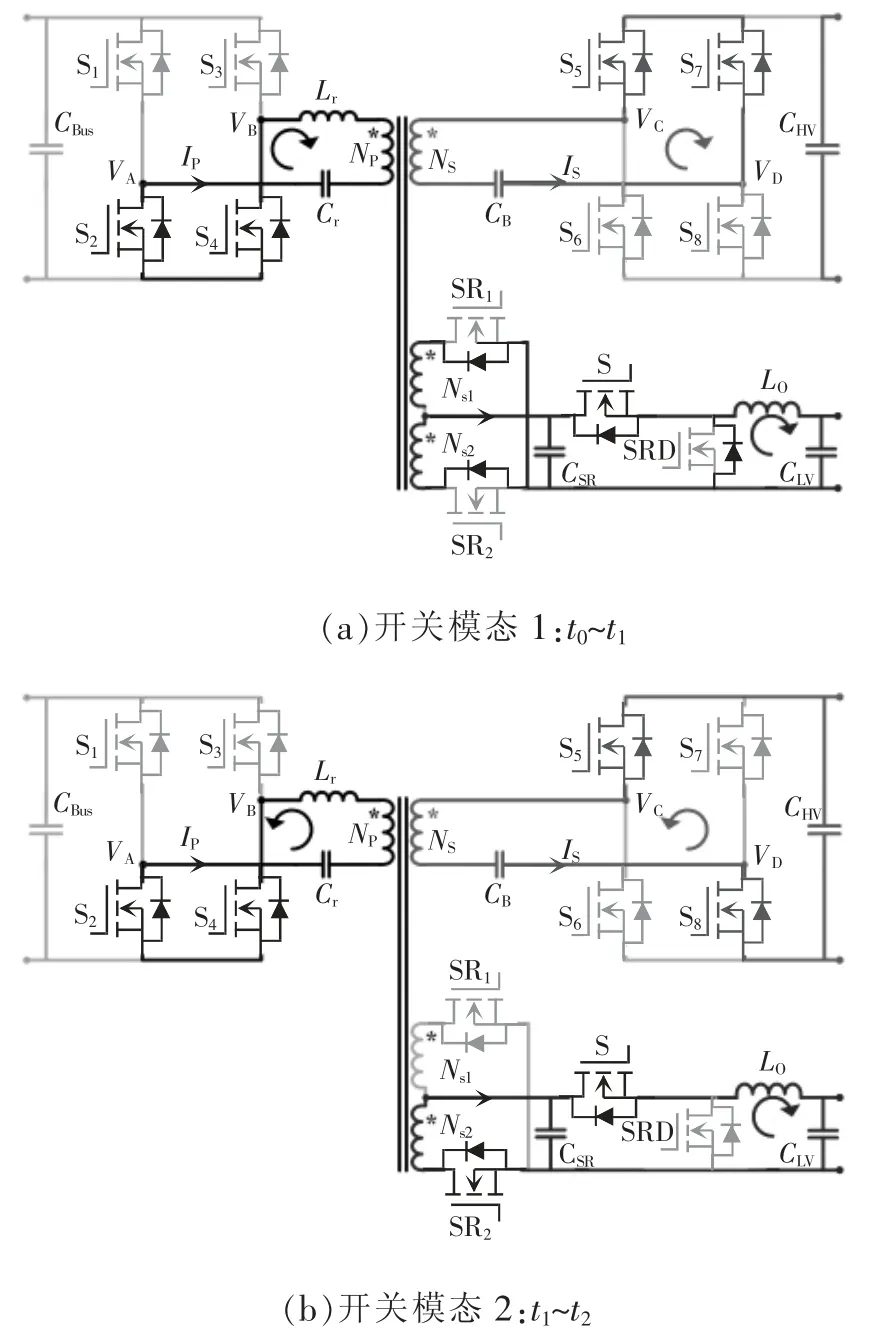
图9 LVDC 独立运行时半个开关周期的工作状态Fig.9 Working state in half switching cycle when LVDC runs independently
(1)开关状态1[t0~t1]:t0时刻,开关S5实现ZVS开通。原边通过控制开关S2和S4常通形成短路状态,避免了CBus的过充电。副边高压侧由于电流的滞后性通过S5和S7进行续流,低压侧的开关S 处于常通状态,开关SR1和SR2处于关断状态,由于绕组电压VCD是0,LV 侧变压器绕组电流将根据需要自由流动。
(2)开关状态2[t1~t2],t1时刻开关S7关断,S8开通,VCD电压为高压侧电池电压,LV 侧开关SR1开通进行同步整流,整个输出电压的调节通过高压侧的移相控制来实现,BUCK 电路不起作用。
3.2 等效电路分析及设计
该工作状态下的等效电路如图10 所示。与前面谐振型线路分析不同,这里考虑变压器的漏感为Lk(通常在μH 级),原边谐振参数折算到副边高压侧时满足关系:,两者与变压器副边的励磁电感Lm并联(图10(b)),通常情况下,谐振电感和变压器本身的励磁电感满足Lm>>可以忽略Lm的影响。又因为和形成的谐振回路,阻抗表达式为

其中,谐振频率fr=,显然当开关频率fs>fr时,LC 谐振电路呈感性。实际设计时,当开关频率fs≥2fr时,可以基本忽略谐振电容的影响,此时的和励磁电感Lm是直接并联关系,如图10(c)所示等效电路。由文献[13]的分析可知,采用移相控制时,为软开关的实现提供条件。
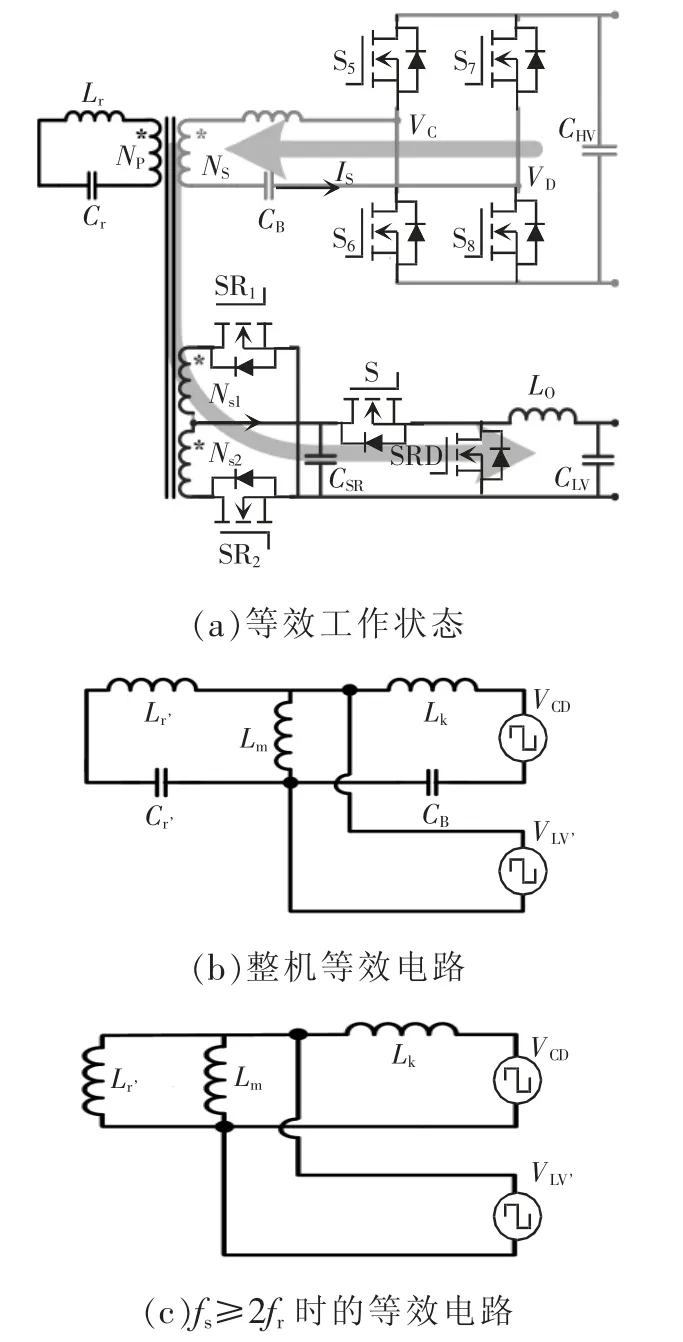
图10 LVDC 独立工作时的等效电路Fig.10 Equivalent circuits when LVDC runs independently
4 仿真分析及设计
为了验证本文所提控制策略的可行性,依据表1所示系统仿真参数,采用SIMetrix/SIMPLIS Pro Ver-sion 8.30b 进行了系统仿真验证,仿真结果分析如下。
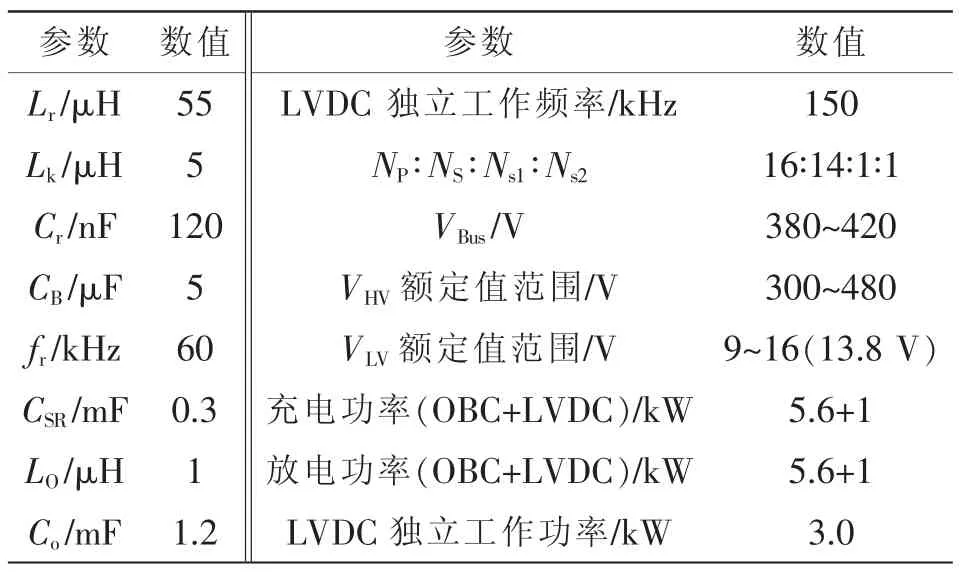
表1 系统主要仿真参数Tab.1 Main simulation parameters of system
(1)OBC 和LVDC 的输出功率分别为POBC=5.6 kW 和PLVDC=1 kW。为了验证BUCK 电路的电压输出调节能力,固定LVDC 的输出电压是16 V 条件下,Bus 电压380 V 和420 V 时,分别对应OBC 输出300 V 和480 V 工况进行仿真。图11 为三端口OBC在充电状态时的仿真波形。结果显示OBC 所有开关均可实现ZVS 动作,开关频率都在谐振频率之上,480V 输出时由于引入了延时控制,可以看到VCD的电压有明显的维持为零的状态,该时段为电感储能,实现高增益输出。
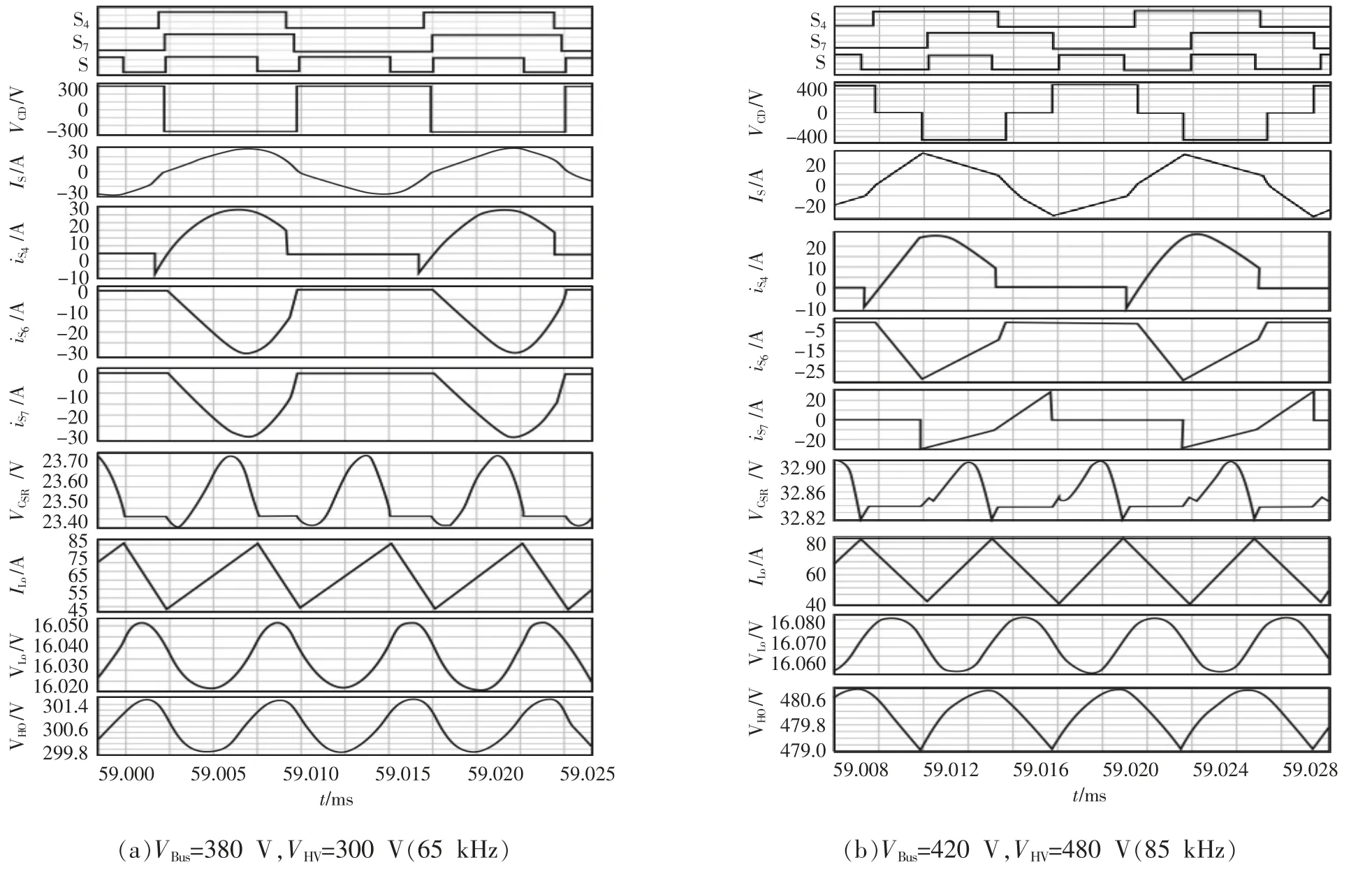
图11 POBC=5.6 kW,PLVDC=1 kW 时充电状态仿真波形Fig.11 Simulation waveforms in charging mode when POBC=5.6 kW and PLVDC=1 kW
(2)OBC 和LVDC 功率分别是5.6 kW 和1 kW。同样固定LVDC 为16 V,高压电池侧电压300 V和480 V 时,分别对应OBC 的Bus 侧380 V 和420 V 的工况进行了仿真。图12 是三端口OBC 放电模式时的仿真波形。电池电压为300 V 输入时引入延时控制,以提高输出增益。
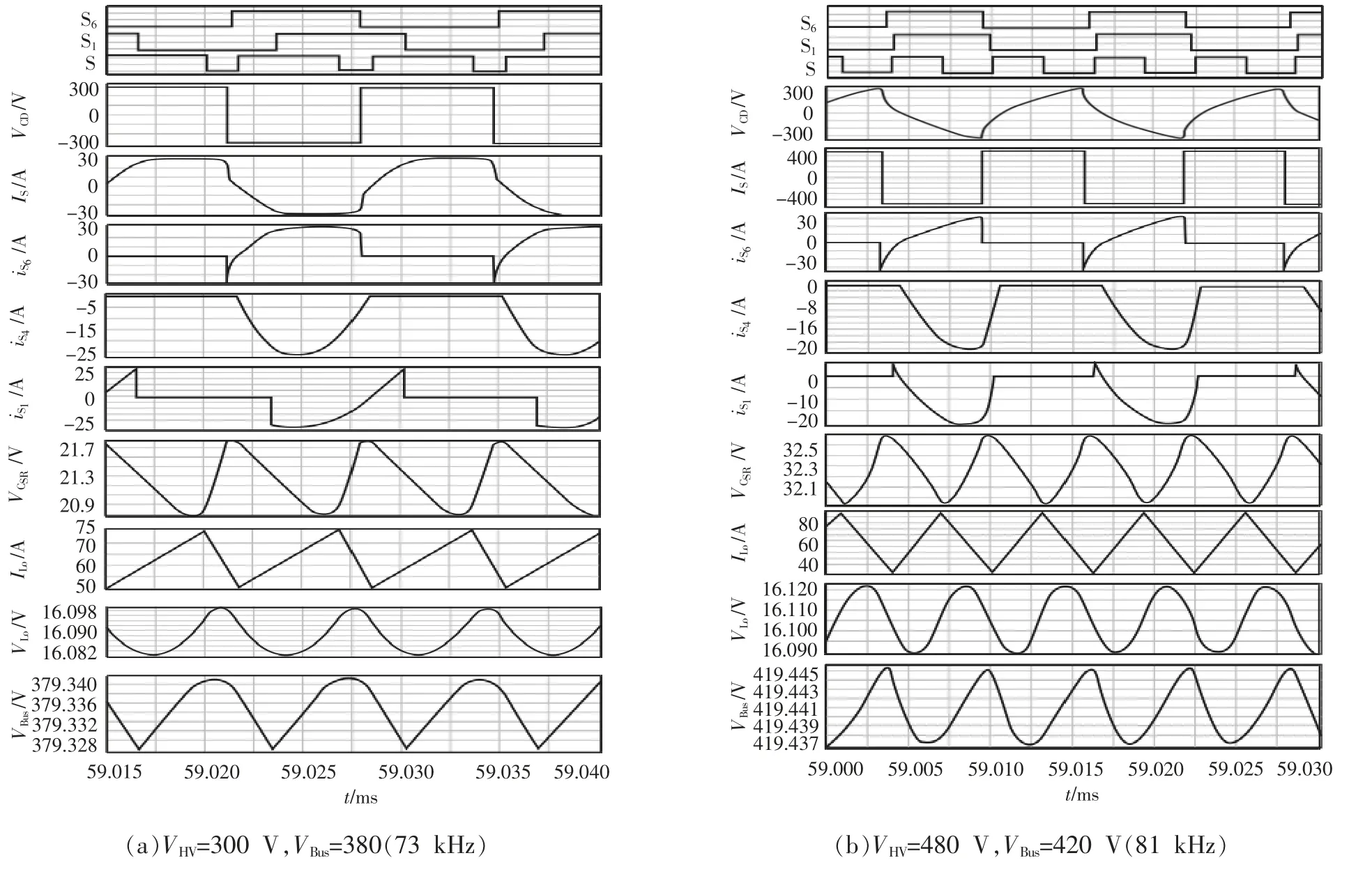
图12 POBC=5.6 kW,PLVDC=1 kW 时放电状态仿真波形Fig.12 Simulation waveforms in discharging mode when POBC=5.6 kW and PLVDC=1 kW
图13 为LVDC 独立工作时,10%负载条件下输入分别是300 V 和480 V 时的仿真波形;图14 为LVDC 独立工作时,100%负载条件下输入分别是300 V 和480 V 时的仿真波形。为了达到考察其输出电压调节能力的目的,固定低压输出是16 V。由于采用移相全桥控制,原边的谐振电感作为励磁电感,并产生励磁电流,保证了LVDC 轻载和满载时都能实现ZVS 动作。当然,由于励磁电流的存在,系统会存在一定的无功损耗,但可以通过提高开关频率来进行调节,实际设计时可以进行折中考虑。
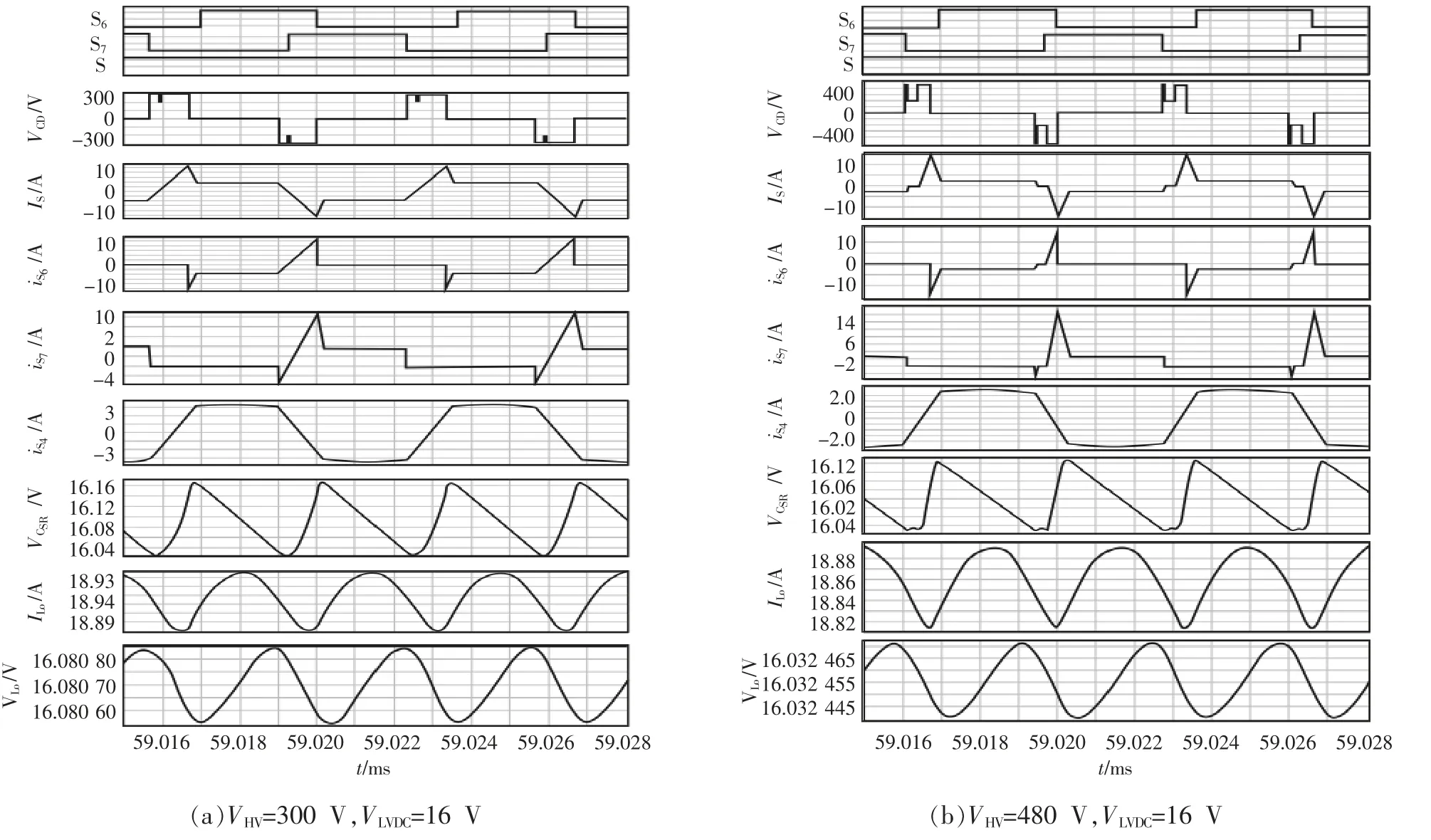
图13 PLVDC=0.3 kW 时LVDC 独立工作波形Fig.13 Operation of LVDC in independent working mode when PLVDC=0.3 kW

图14 PLVDC=3 kW 时LVDC 独立工作波形Fig.14 Operation waveforms of LVDC in independent working mode when PLVDC=3 kW
5 结语
本文基于拓扑解耦的三端口架构进行分析及设计。当OBC 充、放电模态时,高压输出采用LC 串联谐振加延时控制的方法,具有开关ZVS 动作、输出效率高、电压调节范围宽等优点;此时,低压输出LVDC 侧采用不控整流加BUCK 调压的方法实现与OBC 的解耦,提高了端口输出控制的自由度。当LVDC 独立运行时,一方面为了为了避免原边Bus电容过电压的风险,提出原边桥臂中点短路的控制策略;另一方面通过配置开关频率,将谐振电感等效为励磁电感,同时结合移相控制来对LVDC 输出电压进行调节,实现了开关ZVS 动作,提高了变换效率。最后,通过对不同工况下的仿真分析验证了所述三端口控制方法的可行性
猜你喜欢
电工技术学报(2022年20期)2022-10-29
心理学报(2022年10期)2022-10-12
快乐作文(1.2年级)(2022年5期)2022-05-31
湖北大学学报(自然科学版)(2021年5期)2021-08-20
北京航空航天大学学报(2021年6期)2021-07-20
三悦文摘·教育学刊(2021年52期)2021-04-27
电子制作(2019年7期)2019-04-25
西江文艺(2017年15期)2017-09-10
卷宗(2017年1期)2017-03-17
软件导刊(2016年7期)2016-05-14