
工业机器人用柔性电缆技术要求研究
2021-12-21 05:54王会永包大勇李浩天何晓腾
电线电缆 2021年6期
王会永, 包大勇, 李 娜, 李 瑞, 邢 力, 李浩天, 何晓腾
(1.青岛海关技术中心,青岛 266002; 2.上海国缆检测中心有限公司,上海200444)
0 引 言
工业机器人是综合机械、电子、控制、计算机、传感器、人工智能、控制技术等多种学科的先进技术于一体的复杂智能机器[1]。 1962 年,世界上第一台工业机器人由美国AMF 公司研发,随后日本、德国、英国和瑞典等国家先后开始工业机器人的研究,20 世纪70 年代初我国的工业机器人开始研究[2-4],经过几十年的发展,工业机器人已在各个领域得到广泛应用,不仅可以提高劳动效率、保证产品质量,而且能够有效缩短生产周期,取得了重大的经济效益和社会效益,需求量不断攀升[5-6]。 我国工业机器人保有量占全球的四分之一,已成为全球最大的工业机器人市场[7]。
工业机器人用柔性电缆作为传递动力和控制信号的重要部件,必须具有与工业机器人工作相适应的性能才能满足使用要求。 工业机器人用柔性电缆的技术要求不同普通软电缆,是由于工业机器人的使用环境、特殊运动方式及工作强度等因素决定的。目前,工业机器人用柔性电缆包括拖链布线电缆和机器人本体内电缆。
1 工业机器人用柔性电缆性能要求分析
工业机器人按照臂部的运动形式可以分为直角坐标型、圆柱坐标型、球坐标型和关节型机器人等[8]。 目前,关节型机器人使用较多,基本都带有拖链系统。 以6 轴工业机器人为例,分析柔性电缆在机器人工作中的工作状态。 6 轴工业机器人示意图见图1。
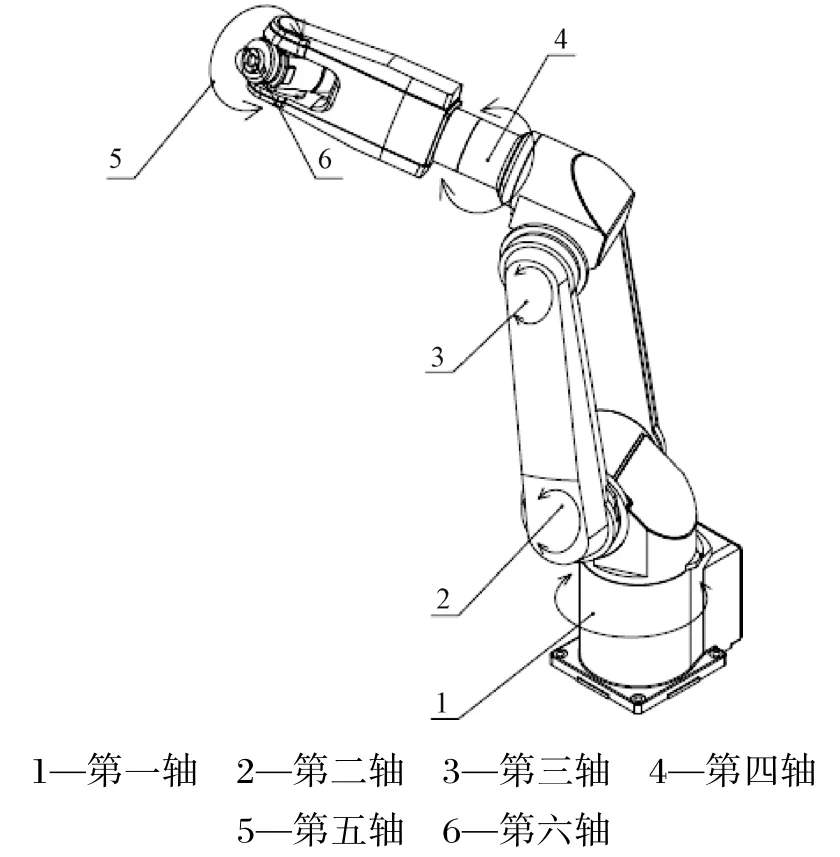
图1 6 轴工业机器人示意图
由图1 可知:6 轴工业机器人本体的主要组成部分[9]包括手部、腕部、上臂、下臂、腰部和基部。图1 中的第一轴相当于腰关节,主要实现回转运动(旋转);第二轴相当于肩关节,主要实现俯仰运动(升降);第三轴相当于肘关节,主要实现俯仰和回转运动;第四轴、第五轴和第六轴相当于腕部关节,主要实现回转、侧摆和翻滚运动。
可以发现,机器人的运动主要包括回转、俯仰、摆动和翻滚等运动方式。 在实际工作中,机器人的运动可以有多种运动形式的组合,例如:回转加升降、回转加仰俯,以及升降加仰俯等运动。 柔性电缆“附着”在机器人上跟随机器人运动,主要承受扭转力、弯折力和往复力等作用。
结合功能需求,工业机器人用柔性电缆具有以下性能特点:
(1)稳定的动力传输性能
稳定的动力传输性能是对柔性电缆最基本的要求,要确保工业机器人持续稳定工作,就必须在运动过程中保持电力传输的稳定性。
(2)精确的信号传输性能
工业机器人工作主要是依据计算机发出的指令完成相应操作,而计算机指令的接收与传递主要通过柔性电缆作为载体进行传输,柔性电缆信号传输的精确性和传输效率将直接影响机器人对指令的接收,进而对机器人的动作产生影响。
(3)较长的机械使用寿命
在机器人的工作过程中,柔性电缆的弯折、扭转、往复运动,及各种磨擦是无法避免的。 在反复、长期的此类运动下容易造成导体断芯、线芯间短路及屏蔽层破损等机械损伤,因此,要求柔性电缆具有较长的机械使用寿命以确保机器人能够持续稳定工作。
(4)良好的环境适应性
工业机器人在制造业领域广泛应用,可能会面对高低温环境、水蒸气、油污及腐蚀性物质等复杂环境,同时柔性电缆也难以避免直接或间接接触机器人内部的油、液体、气体等。 因此,要求柔性电缆具有一定的耐油、防水、抗高温、耐低温,以及耐腐蚀等性能,才能确保机器人能够持续稳定工作。
2 工业机器人用柔性电缆技术要求
根据柔性电缆性能要求,与普通软电缆技术要求相比,柔性电缆要在导体结构、绝缘和护套、绞合结构、屏蔽结构和机械性能等方面提出更高的要求。
2.1 导体结构的设计
导体是电缆机械寿命的第一层保障,导体结构直接关系到电缆机械运动过程中的受力和断线情况,所以导体结构设计至关重要。 在运行速率及频率要求不高的使用条件下,柔性电缆可采用GB/T 3956—2008 中第五种铜导体或在第五种铜导体中增加加强丝;但在运行速率或频率要求较高的使用条件下,最好采用GB/T 3956—2008 中第六种铜导体或在第六种铜导体中增加加强丝。 以上两种情况,也可以采用铜皮软线或直接采用铜合金导体。若采用铜合金导体,由于铜合金材质的导电率要比纯铜的导电率低,所以相同截面积的铜合金导体电阻可能会比纯铜导体的直流电阻大,电缆设计时应考虑直流电阻带来的影响。
影响导体性能的因素除了导体材质外,还应注意绞合应力的影响。 导体为多根绞合或多股复绞合,绞合过程中每根丝受到的应力应均匀一致。
2.2 绝缘材料的选择
绝缘材料是电缆重要的组成部分之一。 绝缘材料的选择不仅直接关系到柔性电缆的介电性能,还与电缆的运行温度、工作环境及耐弯曲、耐扭转和往复运动等有关系。
绝缘材料的厚度是电缆的技术要求之一。 根据不同材料的介电性能确定挤包绝缘材料的厚度,控制挤出绝缘材料的最薄处的厚度以保证其性能。 对于动力电缆,电压等级较高,绝缘材料的厚度相对厚一些,但如果在工业机器人导轨内或本体内使用,须对柔性电缆的外径进行适当限制,而且要控制绝缘材料的厚度以减小电缆的外形尺寸。
在柔性电缆的长期运动过程中,电缆各绞合线芯之间的移动会引起线芯之间的摩擦,特别是对于高速运行的编码器电缆等信号传输电缆,须选择机械强度高、表面光滑、摩擦因数小的绝缘材料,以防止线芯之间因磨擦造成的破损引起短路或击穿。
2.3 成缆绞合结构的设计
成品电缆的机械性能与电缆的绞合有直接的关系,绞合成缆的基本要求是缆芯圆整度。 绞合结构要考虑在运行过程中各线芯受力均匀,因此,应避免绞合成缆的中心部位绞合线芯,采用加强挤出填充的方式,以防止线芯在整线受拉过程中的受力。 对于多芯电缆的绞合,可采用先形成绞合单元,再复绞成缆的结构设计,在受力过程中给予电缆每根线芯更多的活动空间,不易断线。 另外,还应注意电缆绞合节距的控制。
2.4 屏蔽结构的选择
屏蔽作为电缆信号抗干扰常用的一种方法,主要功能是保证信号传输的抗干扰能力。 一般采用铜丝编织或镀锡铜丝编织的形式,有高柔性要求时也可采用铜皮软线作为编织材料,同时应考虑编织工艺对电缆柔软度的影响。
2.5 护套材料的选择
电缆护套是直接接触外部环境的部件,是保护电缆的第一道屏障,护套材料性能的优劣直接影响柔性电缆的介电性能、机械性能及使用寿命等。
护套厚度是电缆的重要要求之一。 根据不同材料的介电性能确定护套的厚度要求,控制护套的最薄处厚度以保证其性能。 对于在工业机器人导轨内或本体内使用的柔性电缆,不仅要对柔性电缆的外径适当限制,还应控制护套厚度以减小电缆的外形尺寸。
护套材料的选择不仅要满足耐磨和耐机械应力要求,还要考虑护套材料柔软度对柔性电缆的影响。此外,柔性电缆在使用过程中还可能会接触油类介质以及受到紫外线等环境因素的影响,因此,护套材料的选择还应考虑环境因素及工作条件。
3 结 语
工业机器人用柔性电缆作为新型特种用途电缆,与普通软电缆相比,具有特殊的使用要求。 目前,全球著名的四大工业机器人制造商[10]生产的机器人本体上很少使用我国品牌的柔性电缆。 研究和分析工业机器人用柔性电缆的技术要求,制定相关的行业标准,有利于促进国内工业机器人用柔性电缆的发展,同时能够提高工业机器人用柔性电缆的质量水平。
猜你喜欢
电力设备管理(2022年13期)2023-01-04
大学物理(2022年12期)2022-02-18
电力设备管理(2021年12期)2021-03-27
新乡学院学报(2016年6期)2016-12-01
橡胶工业(2015年5期)2015-08-29
橡塑技术与装备(2015年7期)2015-07-03
橡胶工业(2015年7期)2015-02-25
橡胶工业(2015年5期)2015-02-24
哈尔滨理工大学学报(2014年4期)2015-01-04
电线电缆(2014年1期)2014-09-28
