混联式混合动力汽车电液复合控制系统研究
2021-12-27 06:49桂林李强军
机械制造与自动化 2021年6期
桂林,李强军
(1.河南工业职业技术学院,河南 南阳 473009;2.河南大学,河南 开封 475001)
0 引言
随着全世界对环境能源等方面的极度重视和关注,众多国家都加入对能源、环境可持续发展的研究中,尤其是我国对能源、环境的关注,使研究工作得到巨大的支撑。混合动力汽车即燃料(汽油,柴油)与电能的混合,电动机作为燃油发动机的辅助动力驱动汽车。混合动力属于一种优势互补的技术,不仅为汽车在正常行驶中产生强大而平稳的动力,而且在起步、加速时降低油耗、节约能源、减小排放。
为了适应国家对能源、环境的大力支持,同时获得综合性能优良的混合动力汽车,国内外众多学者对混合动力汽车控制方法进行了研究分析。孙宝文[1]以插电式混合动力汽车为研究对象,对混合动力汽车电驱动系统高压总线过压问题,采用最优Bang-Bang控制策略来抑制高压总线上的峰值电压,有效地抑制高压总线过压的问题,从而保证混合动力汽车的行驶安全;张怡然等[2]以混合动力汽车为研究对象,运用多目标参数解耦优化方法对混合动力汽车能量管理策略与动力总成参数高度耦合特性进行研究;张权让[3]以四驱插电式混合动力汽车电液复合制动系统为研究对象,为保证制动过程中的电机制动力和液压制动力的协调控制,设计了一套合理、有效的电液复合制动系统和制动系统配套的控制策略,实现了电机制动力和液压制动力的压力协调,确保车辆制动安全可靠和制动平顺性;邓涛等[4]基于灰色预测的方法对混合动力系统ECMS能量管理策略进行分析,研究了等效燃油消耗最小策略ECMS如何提高电池使用寿命;何小路等[5]对现有混合动力车辆控制策略进行总结和归纳,研究了再生制动优化、模糊逻辑优化、动力系统参数优化和动态协调等优化策略的现状,为未来混合动力车辆控制策略研究指明了发展方向;鹿静[6]基于ADVISOR的纯电动汽车电-液复合制动协调控制策略研究;许笑月[7]基于ADVISOR建立电液混合动力汽车永磁同步电机的空间矢量模型以及液压制动系统模型,对再生制动的电-液复合制动协调控制策略进行仿真分析;薛刘朋等[8]建立混合动力汽车电气层拓扑结构模型,分析电气系统干扰的来源和类别,确定控制目标,采用基于干扰观测器控制(disturbance observer based control,DOBC)和有限时间干扰观测器控制(finite time disturbance observer based control,FTDOBC)的方法对燃料电池与超级电容器混合动力汽车能量存储系统的电气层进行研究;刘永刚等[9]基于工况识别以燃油消耗最小为控制目标,采用模拟退火粒子群算法对各类工况下能量管理策略中的关键参数进行离线优化,对混合动力汽车能量管理策略进行优化控制;ZHANG H T等[10]对新型集成式电液制动系统液压控制单元进行设计,同时研究和分析了液压单元的控制特性;韩云武等[11]以混合动力汽车为研究对象,对混合动力汽车在下坡辅助控制过程中的电液制动控制方法进行了研究和分析。众多学者对混合动力汽车动力系统、能量系统及单一系统等方面的控制方法及控制形式进行研究和分析,为混合动力汽车动力系统及其他系统的精确控制、动力性和经济性提高等方面提供了有意义的借鉴,但是对混合动力汽车动力转向系统、制动系统、悬挂系统等多系统的电液复合控制等方面的研究较少。基于此,本研究以某型混联式混合动力汽车为研究对象,对混联式混合动力汽车中的动力转向、制动系统及悬挂系统中的电液控制系统进行研究,为混联式混合动力汽车整车精确控制及电液系统稳定可靠运行提供重要的参考。
1 混联式混合动力汽车动力系统组成
本文研究的混联式混合动力汽车采用后轮驱动形式,整车动力系统主要由蓄电池、变压器、发电机、发动机、电动机、动力传动系统、差速器、车轮等组成。其主要动力传动系统结构图如图1所示。
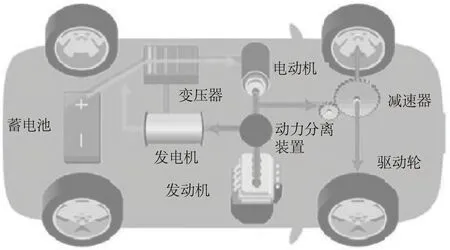
图1 混联式混合动力汽车动力系统组成
由图1可知,混联式混合动力主要靠电机、发动机为辅助,电动机和发动机都能单独驱动汽车。由于系统中配置有独立发电机,因而系统输出的最大动力等于发动机、电动机以及充当电动机(部分情况)的发电机的输出动力之和。混联式系统结构复杂,但动力性能和燃油经济型都相当出色。
混联式与并联式的区别与并联式混合动力一样,这种模式也有两套驱动系统,但不同的是,混联式有两个电机。一个电动机仅用于直接驱动车轮,还有一个电机具有双重角色:当需要极限性能的时候,充当电动机直接驱动车轮,整车功率就是发动机、两个电机的功率之和;当电力不足的时候,就充当发电机,给电池充电。
2 混联式混合动力汽车电液复合控制建模
电液复合控制是综合性的技术,既有液压系统出力大、体积小、质量轻、响应快的特点,又具有电子技术的信号检测、放大、传输及处理和控制灵活性方面的优势,使得电液复合控制具有控制精度高、响应迅速、动态性能好、跟踪误差较小等优良特点,在新能源汽车等新兴领域中得到了广泛的应用。在本研究的混联式混合动力汽车中主要有动力转向系统、制动系统、悬挂系统3个主要系统需要电液复合控制。基于专业电液复合控制仿真软件AMESim联合MATLAB对动力转向系统、制动系统、悬挂系统电液复合控制进行仿真分析。
2.1 动力转向系统电液复合控制建模
参照混联式混合动力动力转向系统结构特性,建立动力转向系统电液复合控制仿真模型如图2所示。
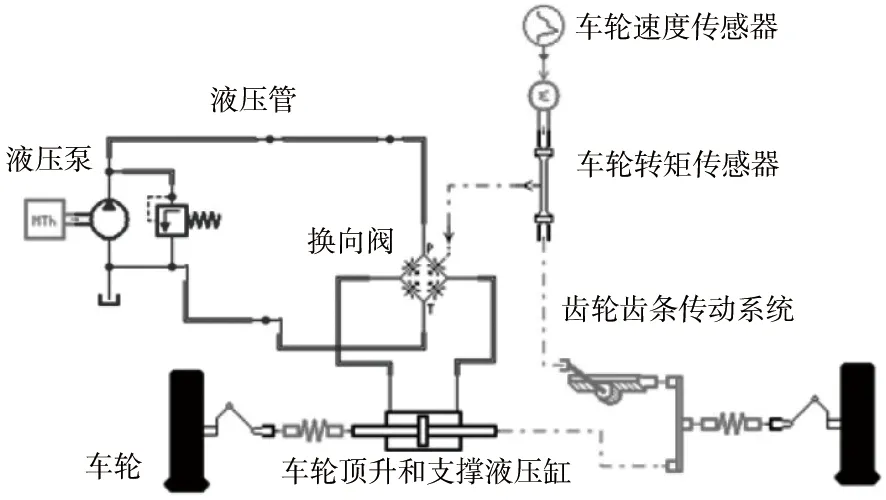
图2 动力转向系统电液复合控制仿真模型
2.2 制动系统电液复合控制建模
参照混联式混合动力动力转向系统结构特性,建立制动系统电液复合控制仿真模型如图3所示。
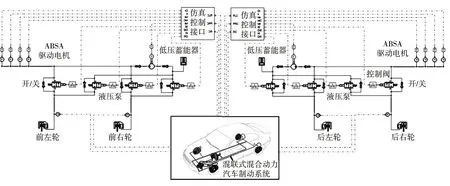
图3 制动系统电液复合控制仿真模型
2.3 悬挂系统电液复合控制建模
参照混联式混合动力动力转向系统结构特性,建立悬挂系统电液复合控制仿真模型如图4所示。
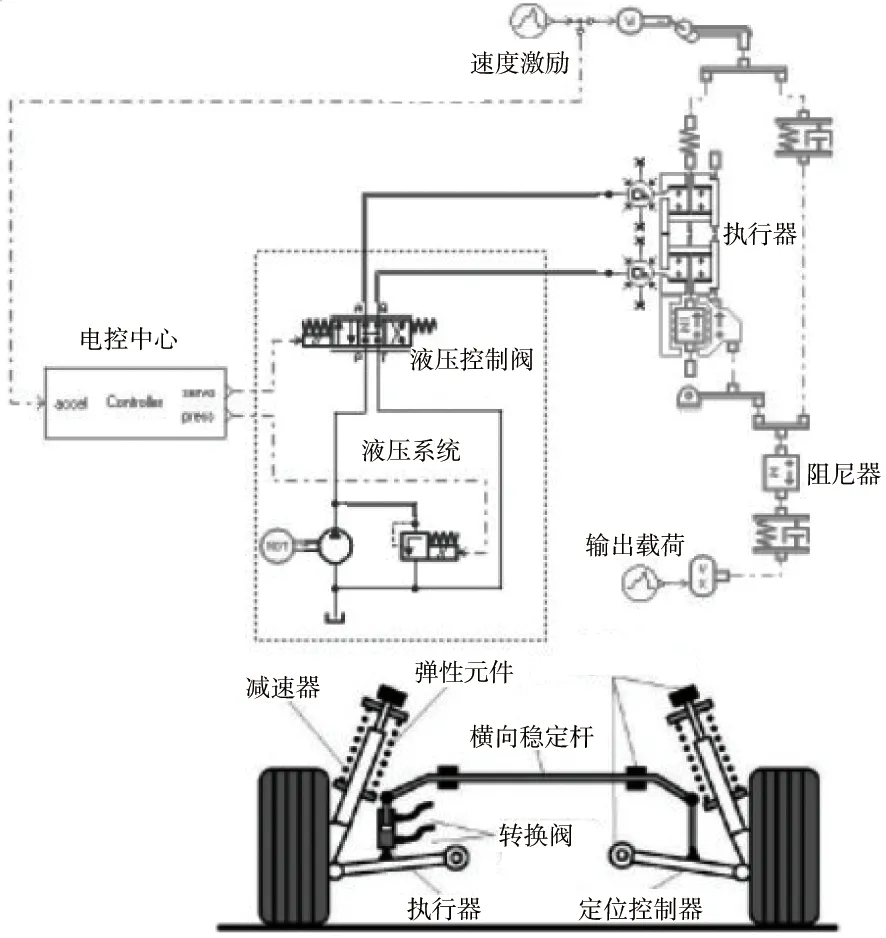
图4 悬挂系统电液复合控制仿真模型
3 仿真结果与分析
根据上文建立的仿真模型,混联式混合动力汽车主要关键参数如表1所示。
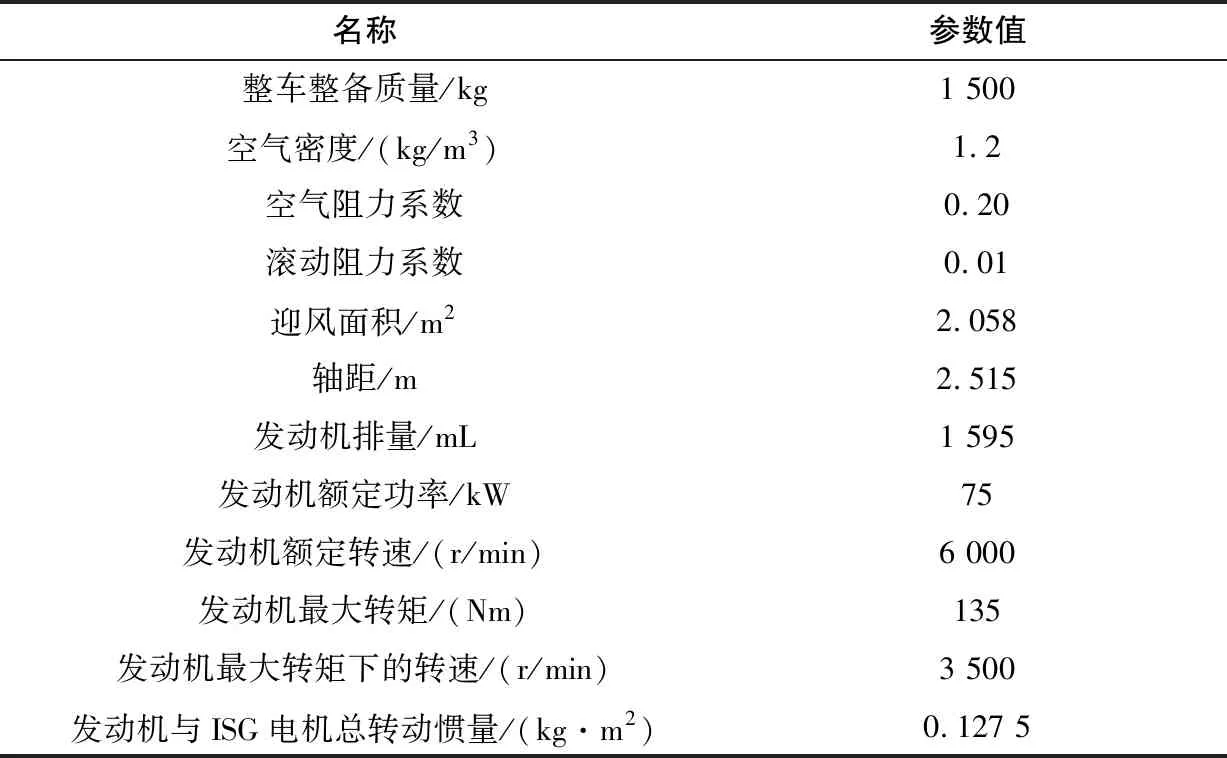
表1 混联式混合动力汽车主要关键参数
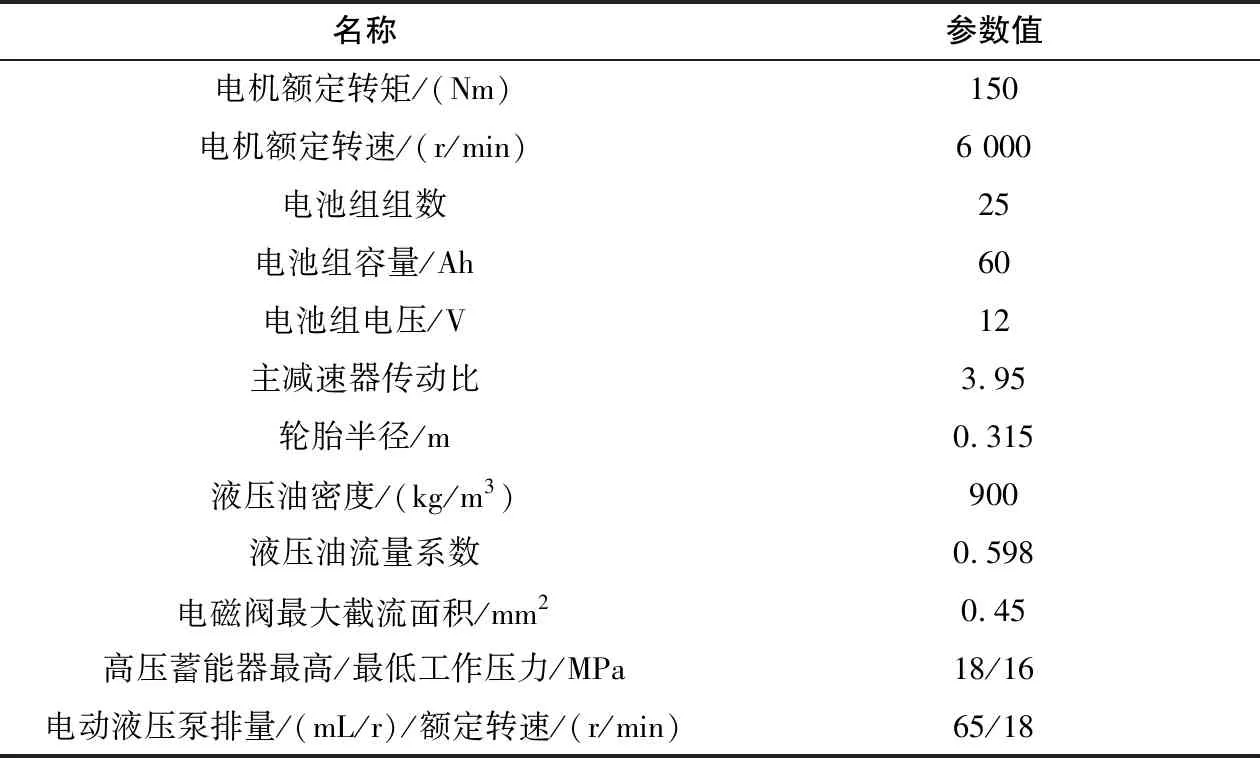
续表1
结合表1中混联式混合动力汽车主要关键参数,设定速度为0~144 km/h,设定工况为加速-减速-加速行驶。对上文中仿真模型进行数值计算,得到动力转向系统、制动系统、悬挂系统电液复合控制仿真结果如下文所述。
3.1 动力转向系统电液复合控制仿真
仿真计算得到动力转向系统中液压油压力及动力转向力矩分布分别如图5、图6所示。
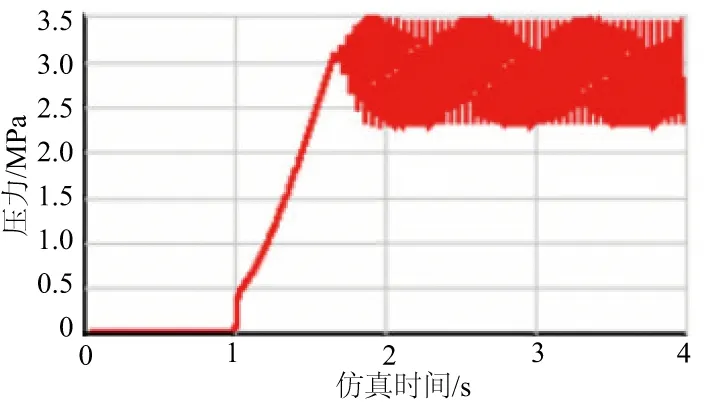
图5 动力转向系统中液压系统压力
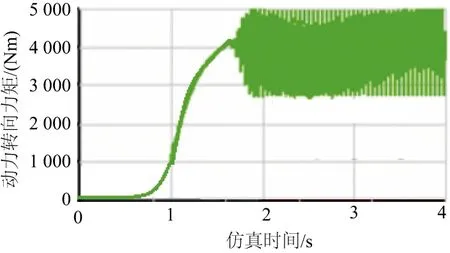
图6 动力转向系统中动力转向力矩分布
由图5可知,混联式混合动力汽车在设定速度和设定工况下,动力转向系统中液压系统压力呈现先增加后在3.0 MPa上下波动的情况,且在振动频率为20 Hz时,液压系统压力达到最大峰值。为了避免液压系统压力波动较大,设计过程中尽量避免上述共振频率。
由图6可知,混联式混合动力汽车在设定速度和设定工况下,动力转向系统中动力转向器输出力矩也呈现先增加后在4 000 Nm上下波动的情况。
3.2 制动系统电液复合控制仿真
仿真计算得到混联式混合动力汽车在加速-减速-加速过程中制动系统车速及制动力分布如图7、图8所示。

图7 制动系统车速分布

图8 制动力分布
由图7可知,混联式混合动力汽车在设定速度和设定工况下,在减速制动过程中实际控制下车速与理论车速存在一定的差异,且在制动初始阶段差异较大,然后逐渐减小直至无差异。
由图8可知,混联式混合动力汽车在设定速度和设定工况下,在减速制动过程中实际控制下制动力小于理论制动力,也存在一定的差异,且在制动初始阶段差异较大,然后逐渐减小直至无差异。
3.3 悬挂系统电液复合控制仿真
仿真计算得到悬挂系统中无、有半主动控制悬挂力-速度曲线分别如图9、图10所示。
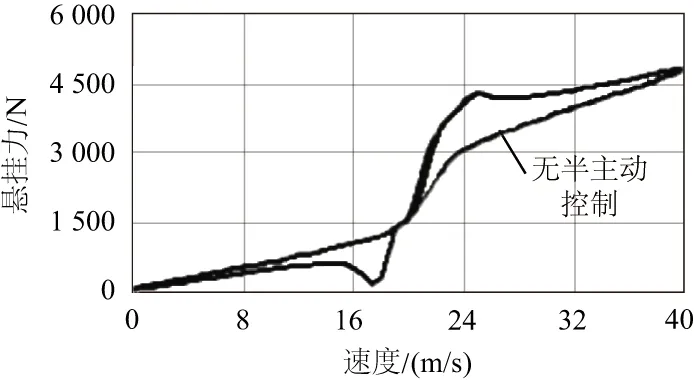
图9 无半主动控制悬挂力-速度曲线
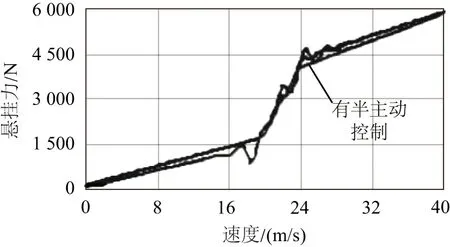
图10 有半主动控制悬挂力-速度曲线
由图9、图10可知,混联式混合动力汽车在设定速度和设定工况下,在不同控制方式、不同速度下悬挂力不同,但悬挂力随速度变化的趋势基本一致。对比图9和图10可知,有半主动控制下在同一速度下悬挂力前后差值小于无半主动控制,说明在混联式混合动力汽车悬挂系统中电液复合控制系统中增加半主动控制时控制效果更优。
4 试验验证
基于上文仿真分析,选择混联式混合动力汽车中最易获得试验数据的制动系统进行试验。依托某专业第三方检测机构,对混联式混合动力汽车进行道路试验,混联式混合动力汽车制动试验场景如图11所示。

图11 混联式混合动力汽车制动试验场景
根据图11所示的混联式混合动力汽车制动试验场景,进行加速-减速-加速速度为0~144 km/h行驶工况,制动试验与对应仿真计算对比结果如表2所示。
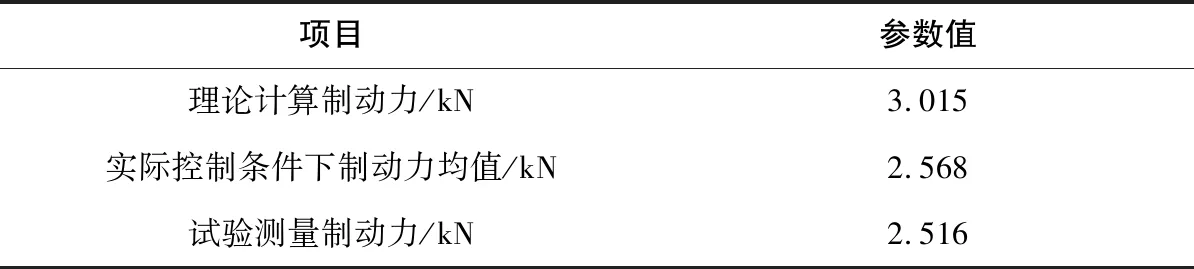
表2 混联式混合动力汽车制动试验与对应
由表2可知,混联式混合动力汽车制动力理论计算值为3.015 kN,实际控制条件下制动力均值为2.568 kN,试验测量制动力为2.459 kN,实际控制条件下制动力相对于试验测量制动力相对误差4.23%,相对误差较小,验证了仿真分析的正确性。由于理论计算模型中未考虑车辆在实际运行中环境、天气温度和湿度、车轮气压、路面情况等因素,从而导致理论计算值偏大。
5 结语
1)仿真结果表明:混联式混合动力汽车动力转向系统中电液复合控制条件下液压油及转向力矩存在一定的波动;制动系统中电液复合控制下车速及制动力也存在一定的波动;悬挂系统中引入半主动控制电液复合控制效果更优。
2)软件仿真可以较准确地对混联式混合动力汽车动力转向系统、制动系统、悬挂系统电液复合控制趋势进行预测,但是与实际测量值还是存在差异,需要根据后续试验参数不断调整、修正,以得到最优控制方式。
3)以混联式混合动力汽车为主要目标的新能源汽车及以电液复合控制条件下的智能化控制在未来是众多研究者着重关注和深入研究的方向。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
遥测遥控(2022年1期)2022-02-11
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
故事作文·高年级(2017年10期)2017-10-19
小学阅读指南·低年级版(2016年1期)2016-09-10
专用汽车(2016年4期)2016-03-01
电测与仪表(2015年21期)2015-04-09
组合机床与自动化加工技术(2014年10期)2014-03-01