模糊PID在柔性手指控制系统中的应用
2021-12-29 07:02高宇轩陈东华李梦洁
机电元件 2021年6期
高宇轩,陈东华,李梦洁
(1.哈尔滨商业大学轻工学院,黑龙江哈尔滨,150028;2.内蒙古电力(集团)有限责任公司,内蒙古锡林郭勒,027300)
1 前言
柔性手指系统由于气体的可压缩性、硅胶材料的非线性等,是一个高度非线性、强耦合的时变系统,通过数学理论和几何分析得到的数学模型不是十分精确[1]。在控制方法选择上面,使用最多最简单的线性控制方法对该系统的控制效果不能达到预期[2]。所以选择使用模糊PID控制方法对柔性手指进行的弯曲角度进行控制,使用模糊控制调节PID控制器参数,来实现PID参数随手指弯曲角度值与期望值之间的误差进行调节,提高对柔性手指弯曲角度的控制精度[3]。
针对气动柔性手指系统,设计了一种模糊PID控制器,并利用COMSOL和Simulink进行联合仿真,将模糊PID控制器与传统PID控制器控制效果进行对比,对仿真结果进行分析。
2 模糊PID控制
传统PID控制器是线性控制器,应用领域广泛,但对于复杂非线性系统来说,PID控制器的控制效果不尽如人意。如果PID的控制参数可以根据系统的变化进行动态调整,选择对于系统当前情况来说最优的控制器参数,那么系统的响应就会一直保持在良好的状态,达到预期的控制效果[4]。模糊PID就是通过模糊控制实时对PID参数进行调整,实现参数的自整定,来使系统响应达到最佳[5]。
3 模糊PID控制设计
模糊PID控制器设计过程为:首先,将系统输出与期望值的偏差e和偏差变化率ec进行模糊化;其次,将人对被控对象的控制经验输入给计算机,设计模糊规则,再根据模糊规则得到输入所对应的输出;最后,将模糊输出反模糊化转换为精确值。具体步骤如下:
(1)定义语言变量
模糊PID控制器的输入变量为偏差e和偏差变化率ec,偏差e是手指弯曲角度与设定值之差,偏差变化率ec是偏差e对时间的一阶导数;控制器的输出变量为PID参数的变化值Δkp、Δki、Δkd。
确定输入e和ec的论域为[-6,6],输出Δkp的实际变化论域为为[-6,6],Δki的实际变化论域为为[-0.6,0.6],Δkd的实际变化论域为为[-0.6,0.6]。输入输出均选择7个语言变量作为模糊子集:{NB、NM、NS、Z、PS、PM、PB}。
(2)选择隶属度函数
隶属度函数的作用是连接精确值与模糊值的桥梁,用来描述模糊语言变量的定量,是模糊集合的特征函数。根据隶属度函数的选择原则,确定各输入输出变量的隶属度函数均为:左右两端为高斯型函数,中间为三角形函数。以输入变量e和ec为例,其隶属度函数如图1所示。
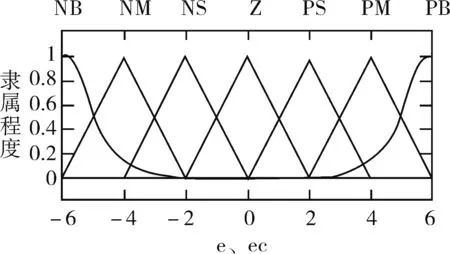
图1 输入变量e、ec的隶属函数曲线
(3)设计模糊规则
模糊控制规则是根据人对被控对象的控制经验所设计的,整个控制系统性能的好坏完全由模糊规则所决定。在偏差e很大时,将kp设为较大值来提高系统的响应速度,尽快减小误差,将ki、kd设置为较小值,抑制系统超调量提高系统稳定性。在偏差e较小时,将kp设为较小值来降低系统的响应速度,增大ki、kd值,提高系统稳定性和动态性能。建立规则表如表1所示。
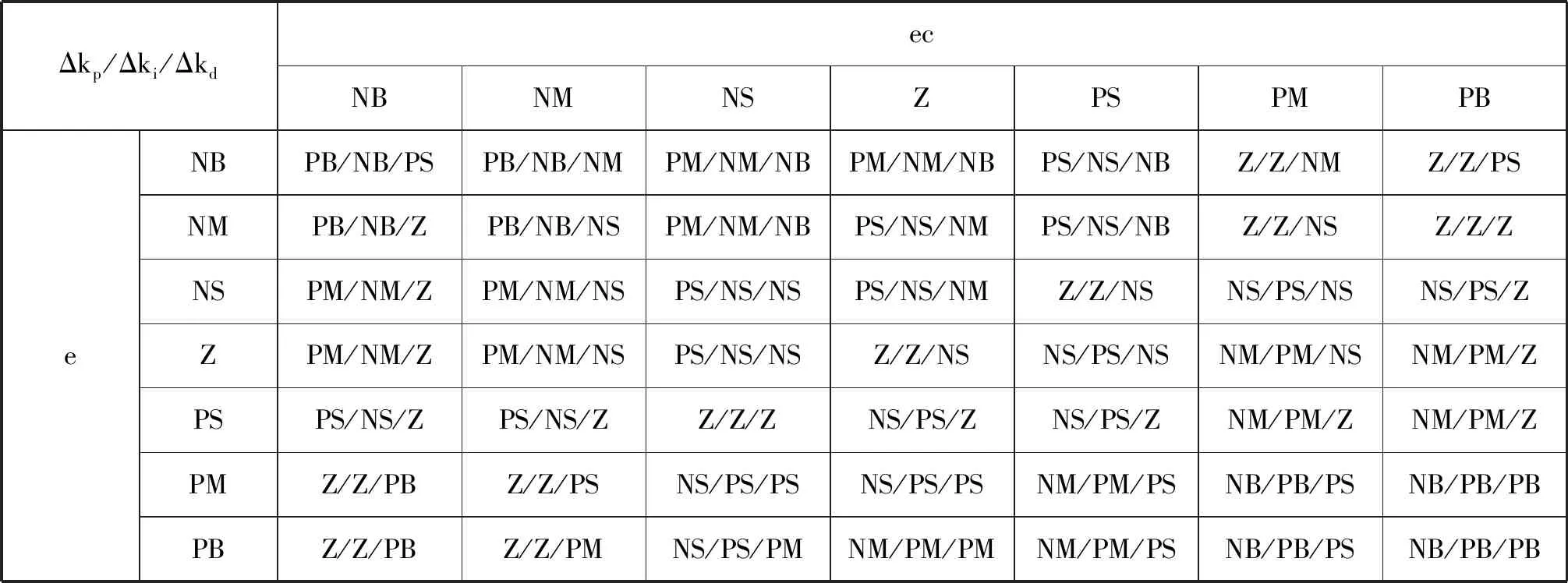
表1 Δkp、Δki、Δkd模糊规则控制表
(4)模糊推理
模糊推理是计算机模拟人的控制方法去控制被控对象的过程,即计算机根据所设计的模糊规则和系统目前的响应来得到控制器输出的过程。采用Mamdani法对模糊集合进行计算。可以得到Δkp、Δki、Δkd的量化输出值。
(5)反模糊化
由于模糊控制器只能得到模糊输出量,无法直接输出给被控对象,需要将模糊输出量变成可以被被控对象所识别的准确数值,这就是反模糊化。采用最大隶属度法对模糊输出进行反模糊化。
4 联合仿真
在COMSOL中建立柔性手指的几何部分模型,在Simulink中建立控制系统模型,通过COMSOL with simulink接口对所设计的模糊PID控制器进行联合仿真,分析控制系统性能。
将手指弯曲的目标角度设置为阶跃信号,手指由初始状态0°弯曲到目标角度,选取100°、180°两个角度即1.75rad、3.14rad作为系统输入,仿真结果如图2、3所示。
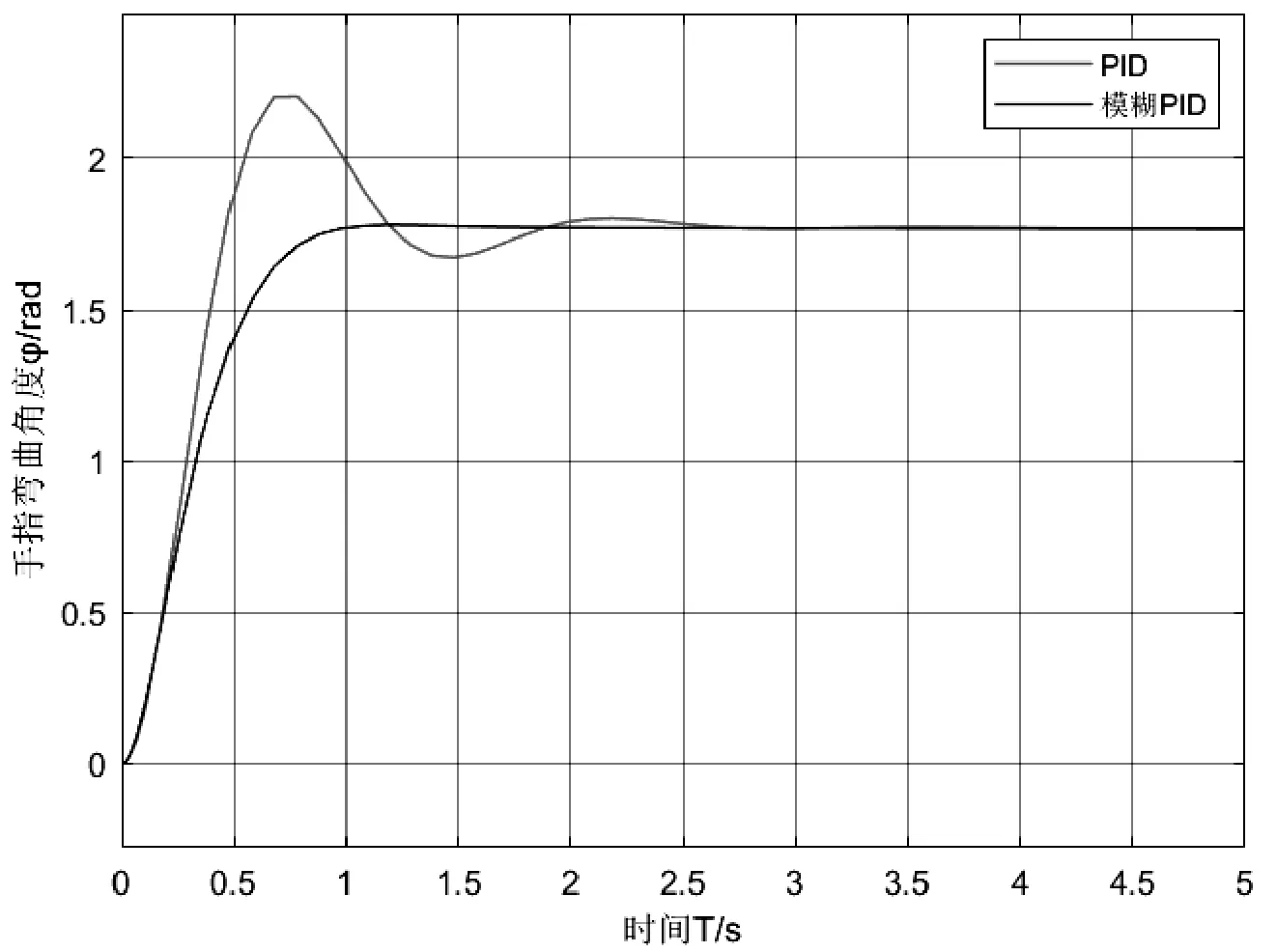
图2 φ=1.75rad
当手指弯曲角度设置为100°(1.75rad)时,PID控制系统到达稳态的响应时间为2.53s,系统超调量25.9%;模糊PID控制的响应时间为0.88s,系统响应无超调,且无静差。当手指弯曲角度设置为180°(3.14rad)时,PID控制系统到达稳态的响应时间为2.65s,系统超调量26.3%;模糊PID控制的响应时间为0.95s,系统响应无超调,且无静差。
对于柔性手指系统来说,模糊PID与传统PID相比,模糊PID提高了系统响应速度,降低系统超调,增加了系统的稳态性能,控制性能优于传统PID。
5 结论
针对气动柔性手指系统的特点和模糊控制理论,通过设计步骤设计出了模糊PID控制器,利用Simulink和COMSOL对柔性手指系统进行联合仿真分析,仿真结果显示,模糊PID控制的响应时间比PID控制提高了一倍,降低了系统超调量,系统响应无静差,验证了设计的模糊PID控制器的控制效果。
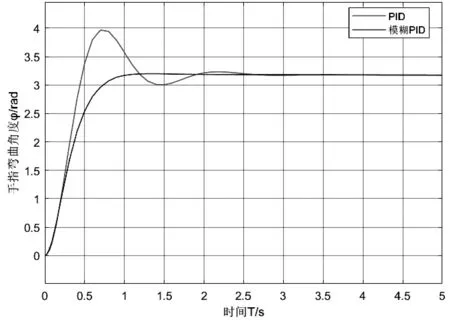
图3 φ=3.14rad
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
实用手外科杂志(2022年2期)2022-08-31
厦门大学学报(自然科学版)(2022年4期)2022-07-15
石油沥青(2021年5期)2021-12-02
小聪仔(婴儿版)(2020年12期)2021-01-26
文化创新比较研究(2020年7期)2021-01-13
现代装饰(2020年7期)2020-07-27
运筹与管理(2019年10期)2019-12-17
少年科学(2015年8期)2015-08-13
小学生·新读写(2006年5期)2006-05-10