
基于螺旋卷绕型人工肌肉驱动的机械手指设计及其运动分析1)
2021-12-31 07:48李梦天余河清刘大彪
力学与实践 2021年6期
甘 辩 李 骞 李梦天 余河清 刘 磊 刘大彪,
*(华中科技大学航空航天学院,武汉 430074)
†(工程结构分析与安全评定湖北省重点实验室,武汉 430074)
自工业革命以来,人类发明了内燃机、电机、气动或液压等动力装置,这些装置对人类文明的发展起到了至关重要的作用。哺乳动物则利用肌肉纤维达到驱动效果。以骨骼肌为例,其输出应力约0.3 MPa,输出应变约20%,功率密度可达300 W/kg[1]。人工肌肉是指用于模仿天然肌肉的新材料或驱动装置,其可感受外部刺激(如光、电、热、湿度等) 并在一个部件内收缩、膨胀或旋转,从而衍生出其他复杂类型的动作[2-3]。如何模拟动物肌肉,进而制备出先进的人工肌肉纤维,是科学家最近研究的热点问题[1,3-5]。2014 年,Haines 等[6]利用聚合物纤维制作出的螺旋卷绕型纤维基人工肌肉(twisted and coiled polymer, TCP) 具有如下的致动特性:当温度恒定时,肌肉相当于一个弹簧,外加载荷会导致肌肉的伸长;当温度升高时,肌肉会缩短。这种TCP 人工肌肉一般由高性能纤维螺旋卷绕而成,其成本低、迟滞小、寿命长、变形量大、能量密度高,在柔性驱动技术领域具有广阔的应用前景[1,3-4,7]。
人手能够完成各种复杂的操作,但机械末端结构机械手完成这些动作并非易事。模仿人手来研究具有多关节的多指机械手的物体抓取、把持等日常动作有着重要的意义。机械手指的设计和制造核心包括执行器材料的选取、驱动方式的选择、手指驱动模型的建立等[8-9]。近年来,随着各种驱动、传感和控制技术的进步,多自由度机械手的研究也取得了较大的发展[9-13],能够抓取各种物体。传统的机械手指多采用直流电动机、气动或液压驱动器,这些常规驱动器一般比较笨重或昂贵。目前研究人员已开始尝试采用纤维基人工肌肉驱动器、形状记忆合金等低轮廓驱动器。2016 年,Arjun 等[14]设计了一种采用TCP 人工肌肉驱动的假肢手。2017 年,Wu 等[9]提出了一种以TCP 人工肌肉为驱动的新型手指模型,通过对人工肌肉的热驱动实现手指两侧的任意偏转。他们研究了三个关节的相对偏转角θ1,θ2,θ3和肌肉收缩量之间的关系。随后关于这种手指实物模型的研究,大多采用Wu 等[9]的理论模型。但是,该模型存在的问题是模型两侧都仅采用一股人工肌肉驱动,即多个关节的偏转只对应于一个收缩量,因此,无法控制各个关节的独立转动。随后,Yip 等[15]在纤维基人工肌肉力与位置控制系统的基础上,通过多根人工肌肉的组合驱动,实现了仿生机械手的多指弯曲动作和手臂摆动动作。
本文旨在提出一种由TCP 人工肌肉驱动的灵巧、紧凑、低成本的机械手指新模型,实现机械手指在三个自由度上的独立驱动,使其更加符合人类手指的运动学规律。同时,基于Karami 等[16]的热驱动物理模型,通过数值模拟对所制备的纤维基人工肌肉的热致动效果以及手指模型的偏转效果进行预测,证明纤维基人工肌肉在仿生机械手应用中的有效性。
1 手指模型
1.1 机械手指模型
机械手指模型的结构如图1 所示,模型由三个关节和一个底座组成,关节和底座具有一沿竖直方向的限位板,关节末端用一铰链与相邻关节连接,初始时刻肌肉处于拉伸状态,随后通过电阻丝使肌肉升温,肌肉发生收缩,肌肉收缩量通过绳索传递到对应关节并转化为关节的偏转。
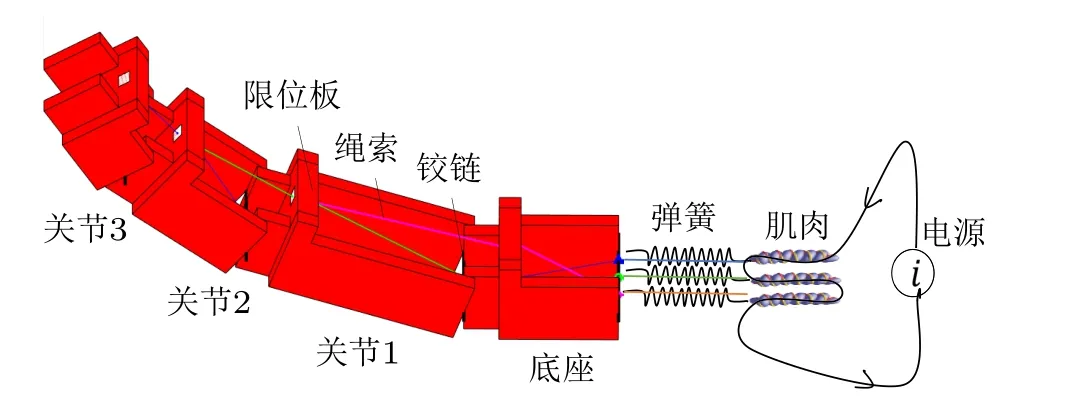
图1 螺旋卷绕型纤维基人工肌肉驱动的机械手指模型
首先分析单个关节的偏转,如图2 所示,关节长度为L,限位板高度为e,长度为d,两侧限位板距离链杆中心的长度分别为l1和l2,肌肉收缩带动关节发生偏转,肌肉收缩量为Δl,关节偏转后两限位板间的绳索长度为C,关节偏转角为θ,关节端点为P。由几何关系,得

由图2 知,偏转后两关节间的绳索长度

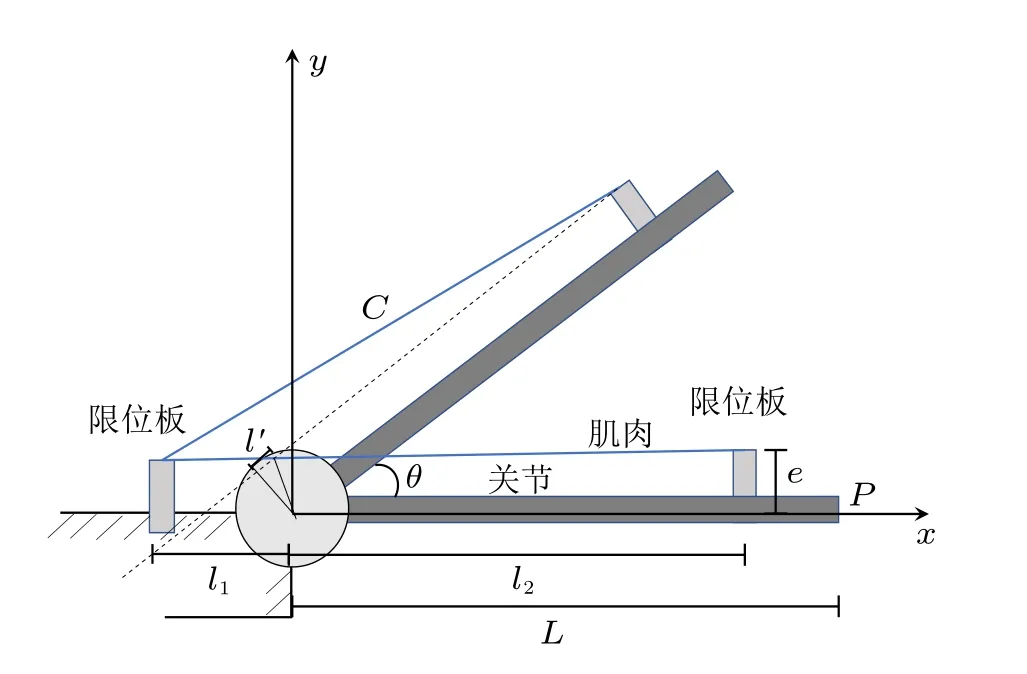
图2 单个关节偏转运动示意图
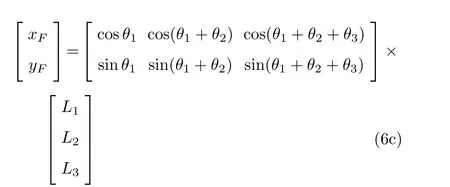
其中,l′=etan(θ/2)。偏转后,P点坐标为

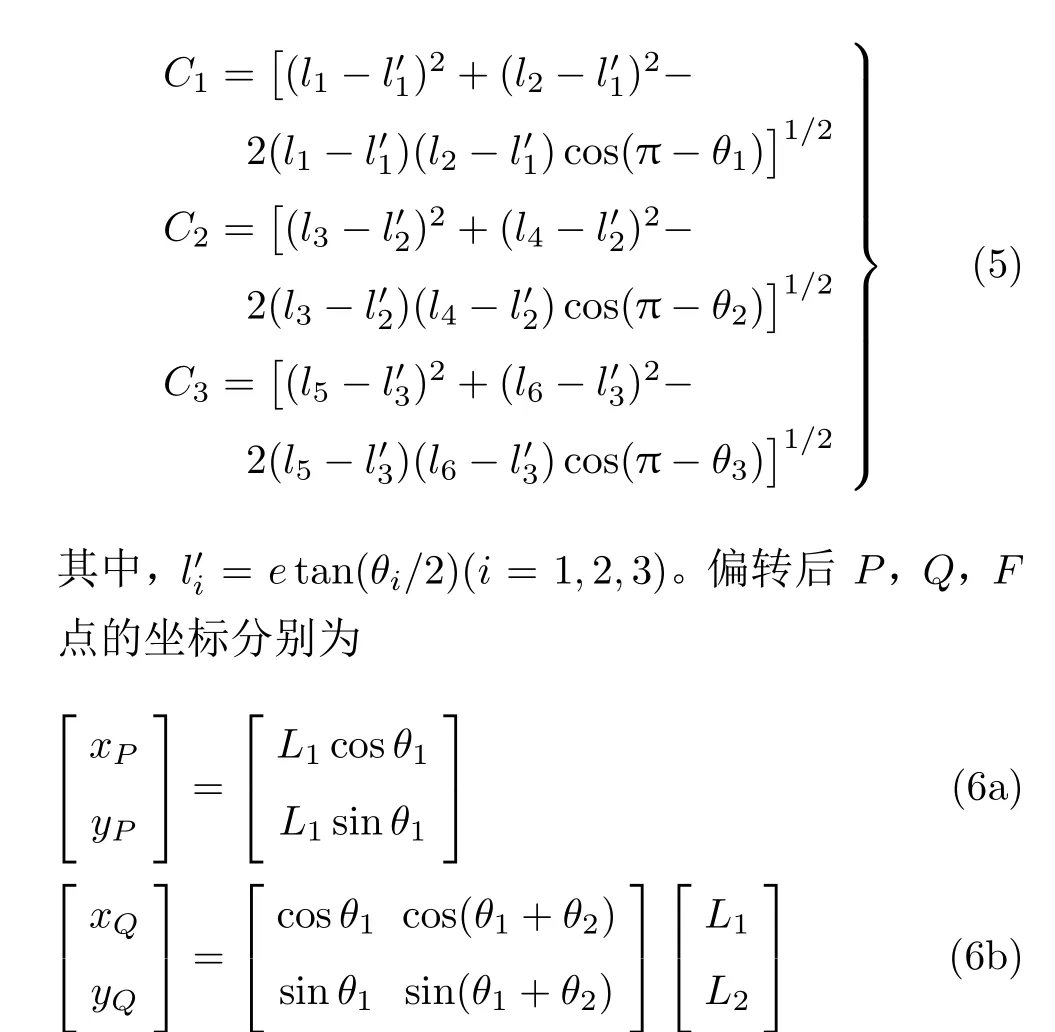
下面分析具有三个关节机械手指的偏转问题,如图3 所示。三关节机械手指的偏转可视为三个单关节偏转的组合。因此,三段肌肉的收缩量表示为
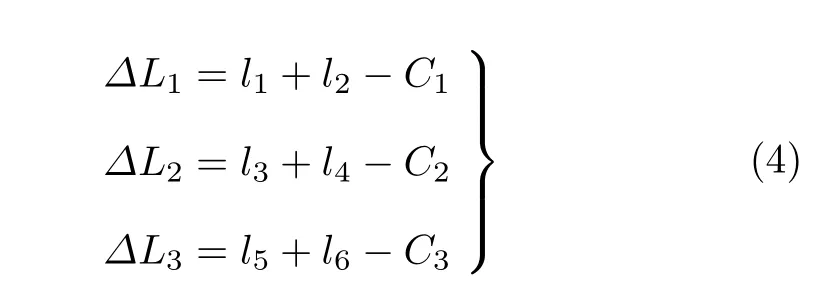
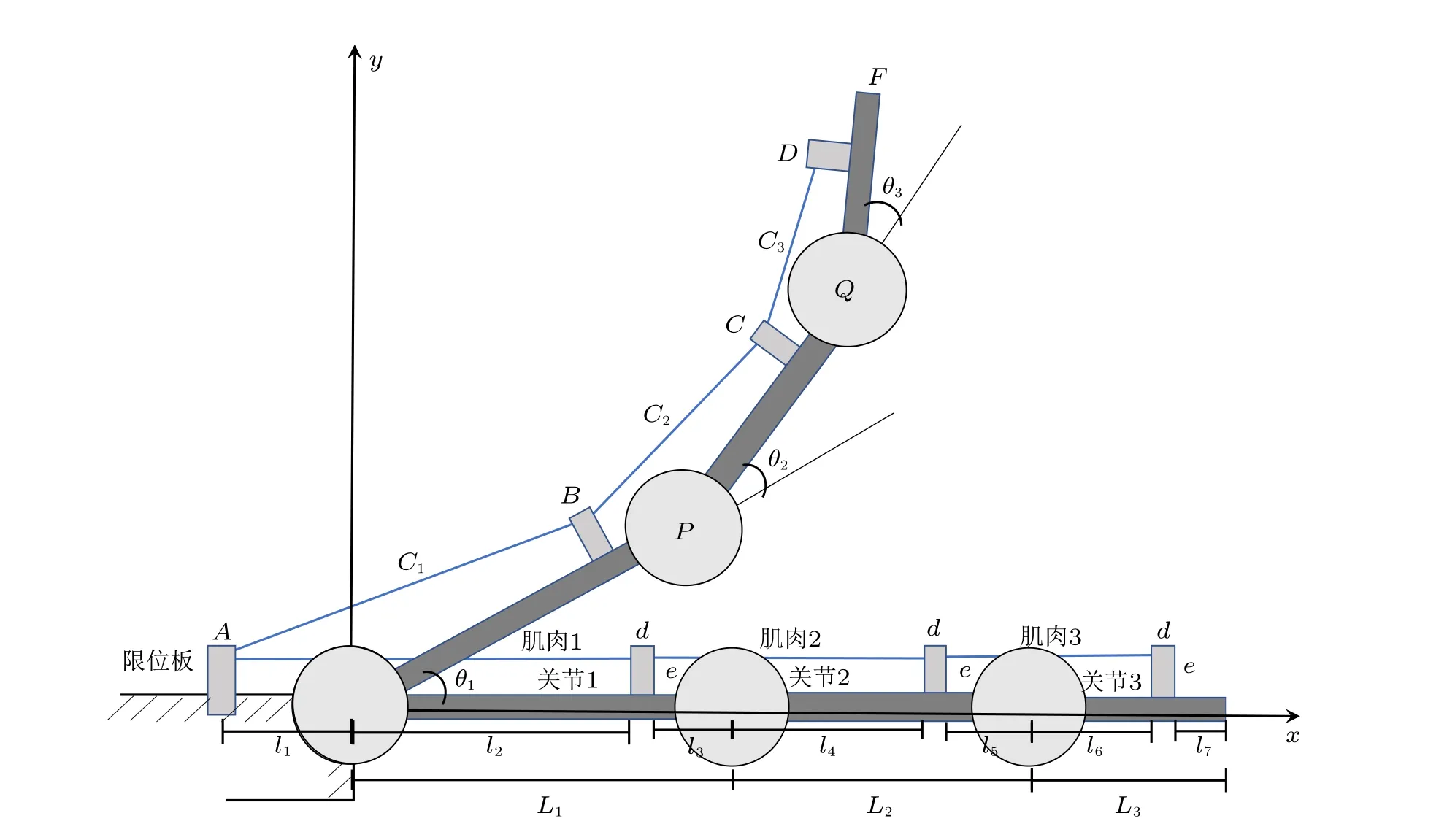
图3 机械手指的偏转示意图
偏转后两个限位板之间的绳索长度分别为
1.2 纤维基人工肌肉热驱动模型
针对热驱动螺旋卷绕型纤维基人工肌肉,本文采用Karami 等[16]提出的物理模型。如图4 所示,单股人工肌肉表面缠绕铜丝,肌肉初始受拉伸,当t= 0 时,在铜丝中通入电流使肌肉升温,t时刻肌肉温度变为[16]
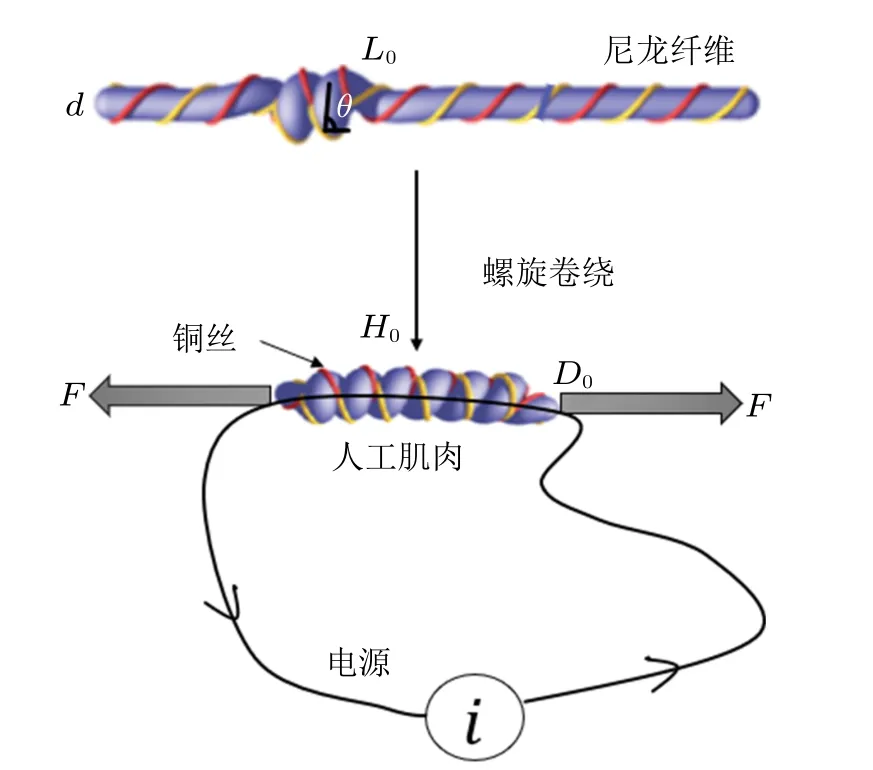
图4 螺旋卷绕型纤维基人工肌肉的致动模型

式中,T0为肌肉初始时刻温度,R0为铜丝电阻,i为通入的电流,h为肌肉与空气之间的对流换热系数,A为有效对流换热面积,α为电阻随温度的变化系数,m为肌肉质量,cp为肌肉比热容。
肌肉加热后收缩,肌肉最终长度为H,由外部载荷造成的伸长量ΔF,以及加热后造成的缩短量ΔT两部分叠加得到
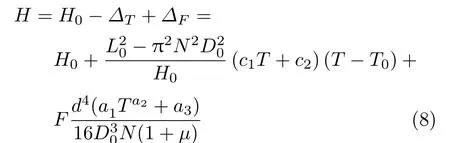
其中,L0为尼龙纤维在室温下的长度,d为纤维在室温下的直径,N为肌肉螺旋圈数,D0为肌肉在室温下的线圈直径,H0为肌肉在室温下的长度,c1和c2为纤维轴向与横向热膨胀系数随温度的变化系数,a1,a2,a3为纤维弹性模量随温度的变化系数,μ为尼龙纤维的泊松比,F为恒定的外加载荷。
由于在机械手指中,采用了弹簧提供的线性回复力作为肌肉的外载,所以下面考虑外载形式为线性回复力时的人工肌肉热驱动模型。忽略关节之间的摩擦,认为在肌肉升温过程中,机械手指模型处于平衡状态。初始时刻,肌肉在弹簧作用下处于张紧状态,弹簧拉力为F0,初始温度为T0,肌肉的初始伸长量ΔHini为

加热后,肌肉温度升高到T,肌肉收缩拉动绳与弹簧,弹簧刚度系数为k0,肌肉在加热后的伸长量可计算为
由于ΔHini和ΔHend都是肌肉相对于自由状态下的伸长量,所以温度升高后肌肉最终长度H为

其中,fun(T)表示肌肉的最终长度为温度T的单值函数。
2 结果与讨论
2.1 热驱动型人工肌肉的致动分析
基于对文献[16] 中实验数据的分析,给出用于模拟温度变化时肌肉收缩量的材料参数,如表1 所示。采用这些材料、结构和环境参数,对温度变化时肌肉的收缩量进行分析。
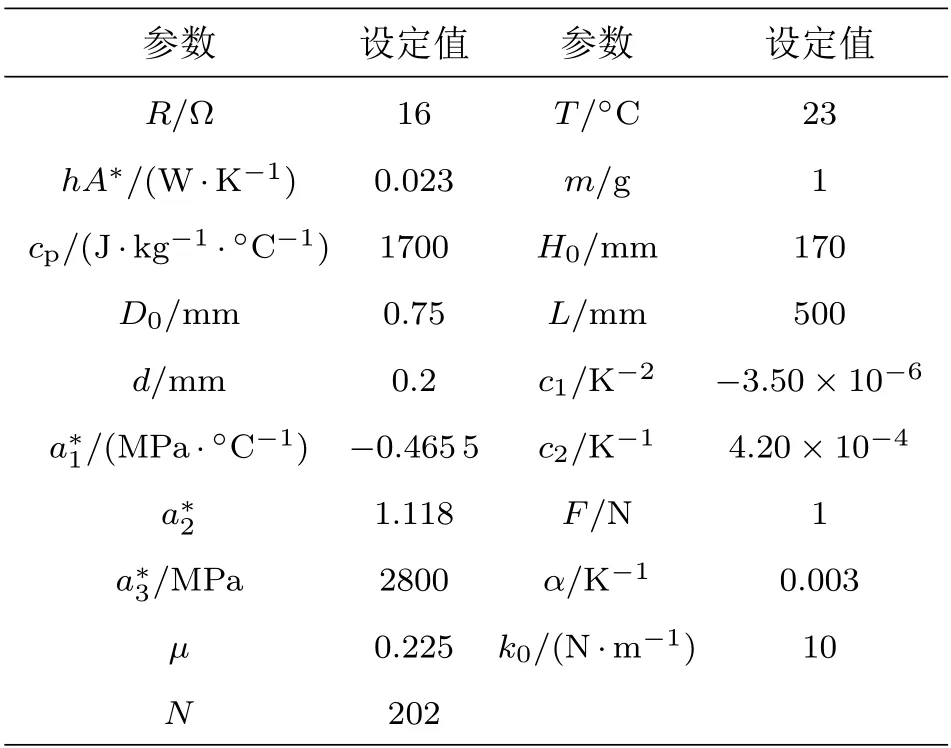
表1 材料、结构与环境参数
人工肌肉的温度与电流的关系如图5(a) 所示。分析表明,人工肌肉的温度随电流的增大呈抛物线型增加。当温度较低时,模拟结果与实验结果吻合;而当温度较高时,模拟结果与实验结果有差别。肌肉收缩量随温度的变化关系如图5(b) 所示。当外载为恒力时,肌肉收缩量随温度的升高线性增加,模拟结果与实验结果较为接近。当外载为弹簧提供的线性力时,肌肉收缩量同样随温度的升高线性增加。但是,同一温度下,后者相对前者的肌肉收缩量偏小。
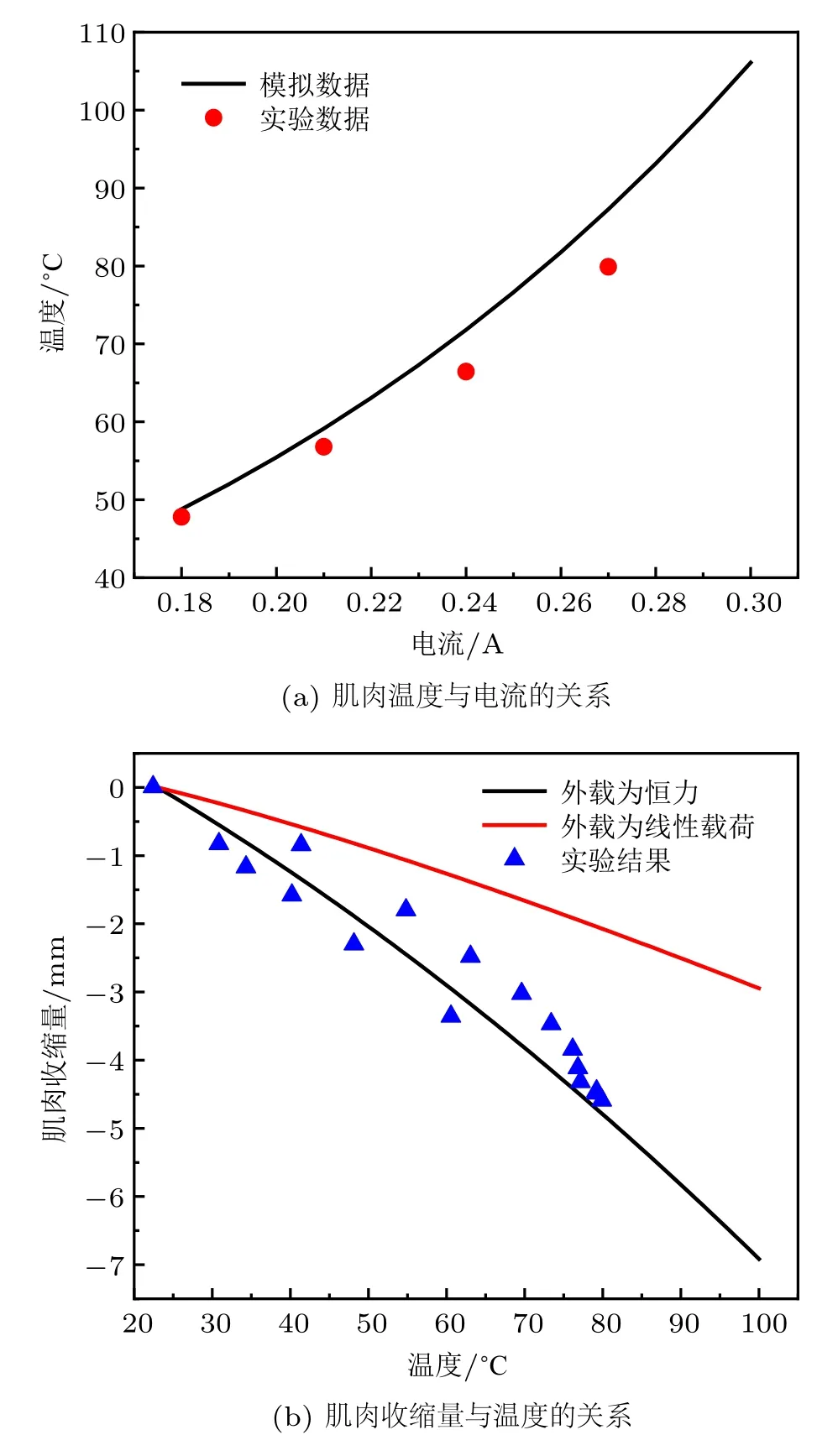
图5 温度-电流和肌肉收缩量-温度关系
2.2 机械手指偏转的运动分析
基于实际人类手指长度与关节比例,给出模拟机械手指偏转的结构参数,如表2 所示,对其偏转做运动分析。

表2 结构参数
肌肉收缩量与各关节偏转角之间的关系如图6(a) 所示。分析表明,同一关节,其偏转角度随肌肉收缩量的增大而增大;同一肌肉收缩量,关节偏转角随关节尺寸的增大而减小。定义机械手指的驱动量转化比

式(12)描述了机械手指偏转过程中肌肉收缩量与关节偏转角之间的转化效果。由图6(a) 可知,各关节的驱动量转化比在0.1~0.25 rad/mm 之间,且随着偏转角或肌肉收缩量的增大而减小。不同肌肉收缩量下机械手指各关节的偏转效果如图6(b) 所示。例如,当各肌肉收缩量达到5 mm 时,手指已经发生了较大程度的偏转。

图6 机械手指偏转量与肌肉收缩量之间的关系
当机械手指采用人工肌肉驱动时,肌肉收缩量由温度和外载共同决定,因此,机械手指的关节偏转角最终取决于温度与外载。若外载为弹簧力时,对机械手指的偏转做运动分析。关节偏转角与温度的关系如图7(a) 所示。可见,关节偏转角随温度的升高而线性增大,但其增量并不明显。例如,当温度为100°C 时,第一关节的偏转角为0.22 rad。不同温度下机械手指的偏转效果如图7(b) 所示。由图可知,随着温度的升高,关节偏转并不明显。结合图5(b)与图6(a) 可知,当外载为弹簧力时,因肌肉收缩量相对较小,导致关节偏转角较小。

图7 机械手指偏转量与温度之间的关系
3 结论
本文设计了一种采用螺旋卷绕型纤维基人工肌肉驱动的机械手指,改进了人工肌肉纤维热致动物理模型,建立了描述机械手指偏转运动的理论模型。主要结论包括:
(1)采用三股螺旋卷绕型纤维基人工肌肉驱动的机械手指,能够实现对各个关节偏转的独立控制,结合人工肌肉热致动物理模型,预测了各个关节的偏转角;
(2)在焦耳加热时,纤维基人工肌肉的温度随着电流的增大呈抛物线型增大,其致动量与肌肉温度线性正相关,且肌肉的致动效果依赖于其承受的外载形式;
(3)关节尺寸一定的情况下,其偏转角随着肌肉收缩量或温度的增加而增大,而驱动量转化比则相反;肌肉收缩量一定的情况下,关节偏转角随着关节尺寸的增大而减小。
猜你喜欢
军事文摘(2022年8期)2022-11-03
实用手外科杂志(2022年2期)2022-08-31
哈哈画报(2021年11期)2021-02-28
小聪仔(婴儿版)(2020年12期)2021-01-26
小学生学习指导(低年级)(2020年10期)2020-11-26
作文大王·低年级(2017年11期)2017-12-05
学苑创造·A版(2017年1期)2017-01-19
家教世界·创新阅读(2016年9期)2016-05-14
少年科学(2015年8期)2015-08-13
西南学林(2013年2期)2013-11-12
