
直流有刷电机在按摩椅中的应用
2022-01-05 10:51刘灿华何绍健
微特电机 2021年12期
刘灿华,何绍健,杨 廉
(宁德职业技术学院机电工程系,福安 355000)
0 引 言
在生活节奏不断加快,社会竞争日益激烈的当今社会,越来越多的人处于“亚健康”状态。依据世界卫生组织资料显示,目前世界范围内约有75%的人口正遭受着“亚健康”带来的困扰[1]。保健按摩作为一种有效的摆脱“亚健康”的方式,越来越受到人们的推崇。电动按摩椅是一种全自动的保健按摩器具,其以丰富的功能与高性价比已成为家家户户家用电器当中不可缺少的一员[2]。同时,我国也发布了相关的国家标准[3],这些都促进了按摩椅行业的快速发展。
电动按摩椅发展至今,虽说技术已经相对成熟,但仍然还有一些问题急需解决,其中舒适性问题是影响电动按摩椅进一步发展的一个重要问题。剖析目前市面上常见的电动按摩椅系统中的驱动电机,大多采用无反馈环节的有刷直流电机,其控制方式依然停留在简单的开环控制阶段,当给电机两端通电时,电机直接转动,缺少一个速度调节的过程。当电机从停机状态转为全速状态时,转速直接由0增加到全速(如4 000 r/min),未有一个提速的过程,这就导致了按摩器具对人体的直接冲击,使得按摩过程的舒适性大大降低。同时,未将转动过程中的转速信号反馈给控制电路,在针对不同体重的人群时,相同的档位给出的转速却是不一样的,这也造成了同样档位有些人感觉不到力量,有些人却感觉力度太大。
针对以上问题,本文在传统的电动按摩椅控制系统上选取带有速度反馈的直流有刷电机,并提出了基于速度环增量式PID控制的按摩椅直流有刷电机控制方式,实现了电动按摩椅的舒适性提升。
1 按摩椅中的电机及控制算法
1.1 按摩椅中电机及性能需求
电动按摩椅的按摩区域主要分成两个部分,即背部按摩区与腿部按摩区。背部区域的按摩功能主要通过一个由3~5个有刷电机组成的机芯实现揉捏、捶打以及上下行走功能。腿部按摩区域主要依靠4~6个有刷电机实现脚底滚轮按摩以及小腿的屈伸功能。因此,一台常见的电动按摩椅大约需要10个直流有刷电机[4]。总的来说,按摩椅所需要的电机属于小功率电机,其最大功率在50 W左右,额定电压在24 V左右,额定转速为1 200~4 000 r/min,电机最大直径尺寸在38 mm左右。基于电动按摩椅按摩过程对揉捏、捶打的平稳效果需求,其所使用的电机需要有良好的调速性能,而直流有刷电机以其结构简单、技术成熟、工艺性能优良的特性,能够广泛应用在电动按摩椅中[5]。而也正是由于直流有刷电机机械结构上满足了电动按摩椅的基本性能需求,在对舒适性要求不高的设计之初,电动按摩椅主要采用的是简单的开环控制方式,没有将电机转动过程中的转速等信息进行反馈,无法实现按摩过程舒适性提升。随着人们对电动按摩椅舒适性要求的提高,对电动按摩椅的性能需求也从初期的只需要能够实现转动及调速提高到能够平稳实现起动及调速的舒适过程,这时简单的开环控制满足不了此性能需求。因此,本文选取带有霍尔传感器与磁环的能够反馈转速信息的直流有刷电机。
1.2 按摩椅中直流有刷电机的控制算法
由于传统的电动按摩椅电机控制多采用开环控制,无法实时反馈转动情况,在追求舒适性的今天,有必要将反馈环节引入电动按摩椅电机的控制中。最为经典的反馈方式即为PID控制,由PID相关理论知识可知,PID算法可分为位置式与增量式[6]。
位置式PID控制算法每次输出均与过去的状态有关,在运算过程中需对每次的偏差值进行累计,计算量大。同时,由于位置式PID的输出对应的是执行机构的实际参数,若微机系统出现故障,输出值将大幅变化,同时引起执行机构的大幅变化,对应到电动按摩椅系统中,将导致电动按摩椅电机转速大幅变化,降低舒适性及安全性。
增量式PID控制算法的每次输出是速度控制量的增量,对应到电动按摩椅系统中,即每次的控制输出是在现有速度上叠加一个增量,从而实现控制过程的平稳过渡。并且,增量式PID的运算过程计算量小,在控制芯片相对低价的电动按摩椅系统中可以得到广泛的应用。
另外,按摩椅执行揉捏、捶打等动作过程中电机时刻保持着转动,在控制过程中对电机运转的位置要求不高,但对速度的性能要求相对较高。因此,在传统的电动按摩椅有刷电机开环控制基础上,修改硬件电路并且将增量式速度环PID控制算法移植到软件程序中,实现电动按摩椅起动及调速过程的平稳过渡,提升按摩椅工作过程的舒适性。
2 硬件电路
本文设计的电动按摩椅用直流有刷电机驱动电路具备转速控制、方向控制及转速测量功能,硬件方案如图1所示。其中,操作面板能够发送与接收转速信息;直流有刷电机尾部配有霍尔传感器与磁环,能够将转动过程的信息传递给测速模块;直流有刷电机驱动模块能够接收微控制器发送的PWM信号,从而驱动直流有刷电机,实现电机转速控制与方向控制功能;测速模块能够获取直流电机提供的霍尔信号,并且经过测速模块的处理输出方波信号到微处理器中进行PID运算,平稳地调节电机转速。其中,电机驱动模块与测速模块是硬件电路的主要组成部分,下面将具体介绍。
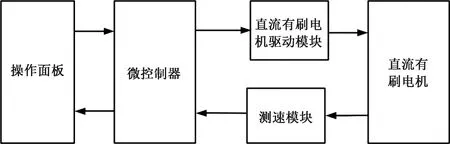
图1 带有速度反馈的电动按摩椅硬件方案图
2.1 直流有刷电机驱动模块
本文基于L298N芯片,结合按摩椅的性能需求,设计了基于L298N的直流有刷电机控制硬件电路,如图2所示。L298N芯片是ST公司生产的一种高电压、大电流的电机驱动芯片,内部集成了两个H桥的高电压大电流的全桥式驱动器,故一个芯片为按摩椅中的多个直流有刷电机提供驱动[7]。
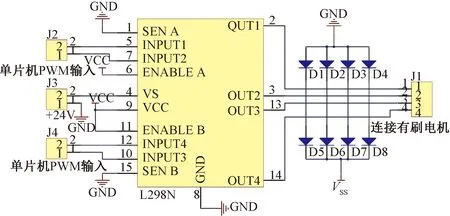
图2 按摩椅直流有刷电机驱动电路
图2中,4脚可依据所选的电机接入12 V或者24 V,最大可达46 V。9脚连接VCC,VCC(5 V)为保证L298N工作需要的电源。D1~D8为8个续流二极管,是为了消除电机转动时的尖峰电压保护电机而设计的。6脚和11脚为两路电机通道的使能开关,高电平使能,可以直接接高电平,也可以交由单片机控制。5、7、10、12脚为连接单片机的驱动输入引脚,2、3、13、14脚为连接电机的驱动输出引脚,其驱动输入引脚与驱动输出引脚的状态关系如表1所示。ENB、IN3和IN4相应控制另一组电机状态(OUT3和OUT4)。

表1 输入引脚与输出引脚状态关系
2.2 测速模块
测速模块电路图如图3所示,其中U1为基于双极半导体工艺设计的霍尔元件,IC2A为集成运放芯片,结合R2、C1等元件构成了一个简单的比较电路。当电机转动过程带动转轴上的磁环运转,霍尔元件U1能检测磁场变化从而输出正弦波[8],如图4所示。并且霍尔元件的频率高到1 MHz,满足最高4 000 r/min的电动按摩椅电机转速性能需求。正弦波信号与比较电路的信号进行比较后即可从IC2A的1引脚输出方波信号,如图5所示,并由J5端口输入到单片机中,进行转速运算。

图3 测速模块电路
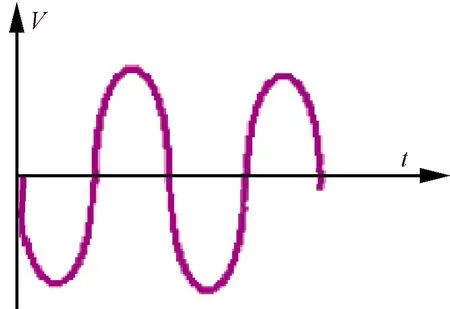
图4 霍尔传感器输出信号
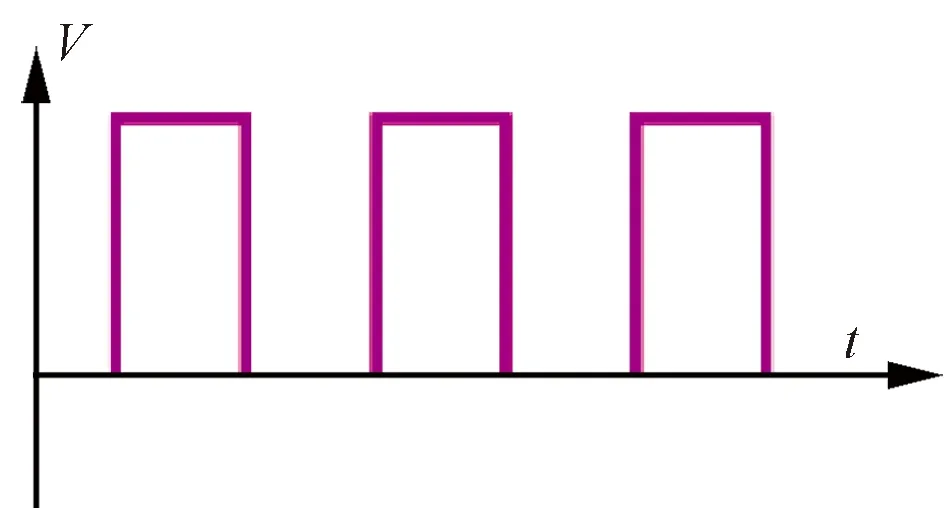
图5 比较电路输出信号
3 软件程序
3.1 软件系统描述
软件程序系统如图6所示,当程序启动后进行相关模块的初始化,包括定时器、中断系统、相关IO端口等。当初始化结束后进入死循环,实时接收操作面板发送的转速档位数据。每当发生档位变化或者从静止起动的过程中目标转速与现有转速产生差距,在PID运算模块中对目标转速与现有转速进行实时运算,从而驱动定时器产生PWM发生器实时调整占空比,使得电机转速从现有转速平稳过渡到目标转速。

图6 带有速度反馈的电动按摩椅控制程序框图
3.2 基于速度环的增量型PID控制算法
在电动按摩椅的整套控制程序中,PID运算部分的程序直接决定了按摩椅的舒适性。基于电动按摩椅按摩过程的平稳性及可靠性的功能需求,本文选取了基于速度环的增量型PID控制算法。针对速度环的PID控制过程如图7所示,每当所测得的现有转速Vt与目标转速Vi存在偏差时,所测得的偏差将输入到PID运算单元中,经过运算后将偏差量直接输入到定时器模块,设置相应的PWM输出,驱动电机进行调速。
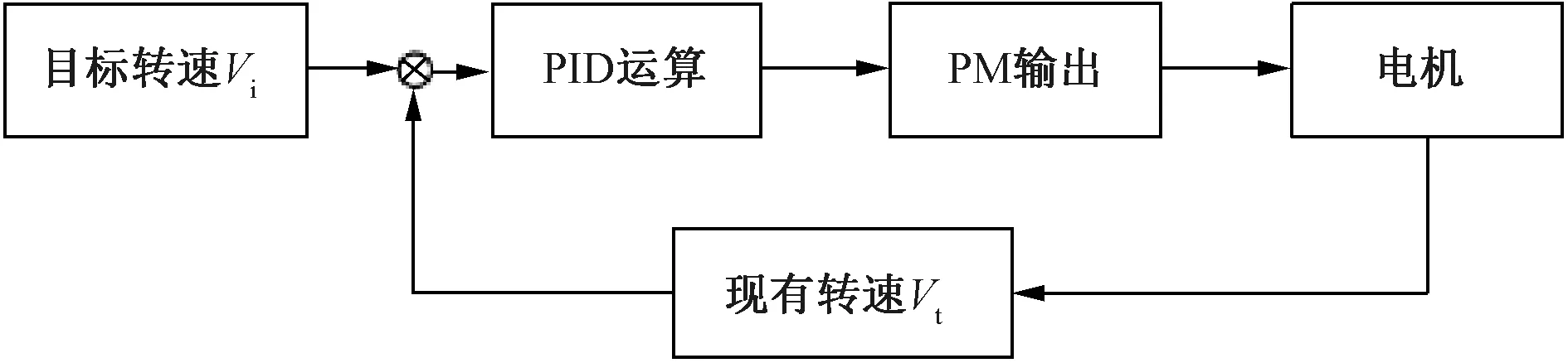
图7 速度环PID工作流程图
速度环的增量式PID调节公式如下:
Δu(k)=Kp[e(k)-e(k-1)]+Kie(k)+
Kd[e(k)-2e(k-1)+e(k-2)]
式中:e(k)为第k次的目标转速Vi与现有速度Vt的误差;Kp为比例系数;Ki为积分系数;Kd为微分系数。
可以看出,每次的偏差只与前三次的误差相关,计算误差对控制量计算的影响较小。而位置式算法要对近几次的偏差进行积分累加,容易产生较大的累加误差。另外,增量式算法得出的是控制量的增量,在速度控制中,只输出速度的变化部分,误动作影响小,必要时还可通过逻辑判断限制或禁止本次输出,不会严重影响系统的工作;而位置式的输出直接对应对象的输出,对系统影响较大。因此,针对本文设计的电动按摩椅系统中的有刷直流电机调速控制,速度环的增量式PID控制算法能较好地适应并切入微处理器中。
4 测试实验
为了测试不同转速下的运转状况以及速度环增量式PID调速所消耗的时间,本文选取了一款带有霍尔传感器的直流有刷电机,其额定电压为24 V,最大转速Vmax为4 000 r/min。按照按摩椅中的力度要求选取了5个力度,计算出相对应的占空比并测试运转情况,记录从静止起动到对应稳定转速消耗的时间,多次测量取平均值后的测试结果如表2所示。

表2 不同力度下的转速及消耗时间测试
从测试结果可以看出,不同力度对应不同的占空比,所测得的转速稳定。并且,从静止到对应的稳定转速所消耗的时间基本在0.6 s左右,这样的PID速度调节时间既不会让人感觉调速过慢,也不会使人们感觉速度突然上升,达到电动按摩椅的舒适性要求。因此,所测试的直流有刷电机及改进的驱动电路适用于按摩椅产品应用。
5 结 语
本文分析了电动按摩椅在我国的广泛使用情况,并针对现有按摩椅中直流有刷电机的开环控制存在的问题,将基于速度环增量式PID控制的直流有刷电机用在按摩椅中。在选择带有霍尔传感器的直流有刷电机之后,改进了相应的硬件控制电路,并设计基于速度环的增量式PID调速控制软件系统,实现了直流有刷电机的正反转及速度控制,所测试的调速时间在0.6 s左右,满足按摩椅舒适性要求。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
当代陕西(2022年6期)2022-04-19
当代水产(2021年8期)2021-11-04
现代仪器与医疗(2021年2期)2021-07-21
销售与市场(营销版)(2020年10期)2020-11-02
江苏卫生保健(2020年10期)2020-02-14
计算机应用文摘·触控(2020年23期)2020-01-14
中学生数理化·中考版(2019年9期)2019-11-25
恋爱婚姻家庭·养生版(2019年4期)2019-04-24
建筑热能通风空调(2018年5期)2018-07-09
