纯电动公铁两用车多电机智能控制器设计
2022-01-13 03:33金涛涛
机械设计与制造 2021年12期
王 珏,金涛涛,张 军
(北京建筑大学城市轨道交通车辆服役性能保障北京市重点实验室,北京 100044)
1 引言
公铁两用车是既能在轨道上行驶,又能在公路上行驶,同时可加装多种作业设备改装成不同工程作业车的多功能车辆。在工程中,公铁两用车主要应用于轨道车辆在使用中出现的无动力列车牵引以及紧急事故处理,同时也多用于短距离运输货物。
公铁两用车具有优良的机动性能,灵活的运行方案,较强的可操作性能,如果线路发生故障,其可以快速到达事故现场[1]。纯电动公铁两用车同时也具有整车电气化程度高、噪声小、无污染的特点,现已逐步推广使用。
纯电动公铁两用车的转向系统由4台永磁同步电机组成。在对4台永磁同步电机的控制中,要求4台电机能够实现协同控制,在不同的工况和转向模式下,转向角快速精准到位,否则有可能使两用车转向出现偏移或倾斜,对人员和设备造成潜在的威胁。
国内外对车辆四轮独立转向问题进行了一定的研究,文献[2]研究了汽车分布式独立转向系统转角分配算法,提高了车辆的行驶稳定性,但缺少对控制策略的优化研究。
文献[3]研究了四轮驱动机器人转向控制的研究,提高了控制精度,但对多电机协同控制的控制原理并未涉及。
这里针对纯电动公铁两用车转向系统的多电机协同控制进行研究,基于控制理论和智能控制算法,设计出一种能在线整定参数的控制器,同时提出对4台转向电机采用偏差耦合的协同控制策略,以提高多永磁同步电机的稳态精度、响应特性、跟随精度及同步精度。
2 多永磁同步电机转向协同控制方案
在纯电动公铁两用车转向控制中,4台转向电机通过齿轮箱分别控制4个驱动轮转向,转向角可达270°,可实现横向移动、对角线移动或原地旋转。遥控器上设有“环形行驶”和“对角线行驶”模式选择按钮,通过转向控制器可以在相应方向上向左及向右引导车辆。
目前部分公铁两用车所采用的转向控制策略为,转向时2个前轮旋转角度采用1:3的控制方法,即向左转向时,左侧车轮与右侧车轮转角比为1:3,右转则相反。同时2后轮旋转角度分别与其对应的前轮相同,方向相反。但在实际使用中发现,该种转向方式转向时内、外侧车轮的旋转中心不在同一点,极易造成车轮滑移,导致车轮磨耗严重并使电机过载,同时难以精确控制两用车的前进路径[5-6]。
转角偏差耦合控制器可以通过精确控制内、外侧轮的旋转角度,实现车轮纯滚动转弯前进,减少车轮滑移现象。对于整车转向控制策略,从旋转角度为0度到极限位置之间变化时,内、外侧车轮转向角度的比值从1:1到1:3有规律的变化,确保两用车在不同的转向角下,内、外侧车轮的转向中心控制在同一点。2种转向方式对比,如图1所示。

图1 2种转向控制方案对比Fig.1 Comparison of Two Steering Control Schemes
3 多电机转角偏差耦合控制器设计
3.1 多电机机电系统数学模型的建立
由于公铁两用车在转向过程中需要车轮的转动角度精准到位,因此公铁两用车的转向电机一般采用永磁同步伺服电机。根据公铁两用车永磁同步电机系统的物理结构和其运行状况,利用数学公式可推导出其多电机机电系统的数学模型[7]。由于四个转向机电系统模型是分别独立且完全一致,这里对多电机机电系统的其中一个转向机电系统建立了数学模型。定子绕组各参数经过Clarke变换和Park变换,可转换为各参数在d-q旋转坐标系下的数学模型。经公式推导可得电机的电磁转矩为:

式中:Pn—电机极的对数。
根据公铁两用车使用过程中需要多次连续启停和转向角精度高的特点,我们确定以id=0控制方式,作为多永磁同步电机的控制方式。永磁同步电机系统等效电路,如图2所示。
应用HITACHI HI VISON Preirus彩色多普勒超声诊断仪,高频探头频率5.0~13.0 MHz。患者取仰卧位,头部后仰或垫高肩部充分暴露颈前区[1]。平静呼吸,甲状腺二维超声扫查发现结节后,首先用二维超声观察其形态、大小、边界、内部回声、有无钙化等,然后切换到弹性模式,行甲状腺超声弹性成像检查。显示结节并尽量固定探头位置,手持探头在结节部位做微小运动,使显示屏压力指示条的数字控制在3~4[2],并使感兴趣区域大于结节的2~3倍[3],用双幅实时显示功能动态观察声像图,对甲状腺结节进行弹性分级。
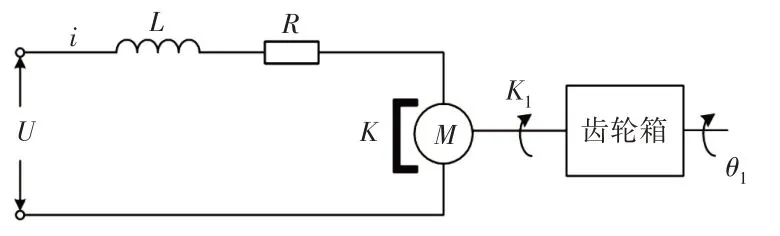
图2 永磁同步电机系统等效电路Fig.2 PMSM System Equivalent Circuit

3.2 多电机转角偏差耦合的同步控制
多台电机协调控制常用的几类电同步控制方式主要有并行同步控制、虚拟主轴控制和偏差耦合控制方式。并行同步控制结构简单,系统给定多台电机同一电信号,多台电机之间相互独立,无法保持电机间的同步性,极易造成多台电机同步误差大。虚拟主轴控制模拟系统机械总轴设计,将给定转速输入给虚拟总轴并作为各电机的参考信号,但该种方式启停控制差,同步误差大,系统鲁棒性能差[8]。
偏差耦合控制方式通过单台电机实际转速与其他电机转速相对比,利用偏差耦合控制器补偿每台电机的转速误差以实现多电机动态同步控制。因此,多台电机使用偏差耦合控制方式,同步误差较高,系统鲁棒性好。鉴于几类电同步控制方式的优缺点,这里选择偏差耦合同步控制方式。
通过中央控制单元MCU计算出每台电机转角给定值为θ0,取θ0为每台转向电机的评价转角。转角协同补偿器将4台电机的转角信号θi与θ0进行比较,并计算其差值,同时每一个转角协同补偿器计算出该电机所需要的转角补偿量,然后输出该电机的转速补偿信号θi,并将信号传递给每台被控电机,实现对电机转角的协同控制[9]。公铁两用车多电机耦合的同步控制结构,如图3所示。

图3 转角偏差耦合多电机控制结构图Fig.3 Rotating Angle Deviation Coupling Multi-Motor Cooperative Control Structure Diagram
对于转角协同补偿控制系统,假定其多台电机之间的转角关系式为:θ1/u1=θ2/u2=θ3/u3=θ4/u4,可将控制系统的同步误差表示为:

式中:eji—第j台电机与系统其它电机的同步误差;
i—第i个转角协同补偿器;
ei—转角偏差补偿器给定每个电机的补偿值。
由上式可知,为满足降低控制系统同步误差的要求,应使每一台电机分别与其他各台电机的同步误差稳定收敛。多台独立工作的电机通过转角偏差耦合的控制方式实现协同控制,在每台电机接收到转角信号并开始进行转角调整的同时,转角协同补偿器对未达目标值或超过目标值的电机转角给予补偿,保证多台电机具有较好的同步性能。但由于使用PID算法与偏差耦合设计出的控制策略存在响应慢、跟踪精度较低的问题,因此,这里基于经典控制算法结合模糊控制算法和偏差耦合,设计了智能控制策略。
4 模糊PID控制器的设计
为了更好地提高系统的稳定性、可靠性及控制精度,本研究采用了模糊PID控制器。模糊PID控制器是一个双输入三输出的控制器,其输入量为位置误差e和误差变化率ec,输出量是ΔKp、ΔKi、ΔKd。模糊PID控制器的模糊控制规则由位置误差e和误差变化率ec及PID控制器的修正参数确定。
首先通过专家经验确定模糊控制规则并制定模糊规则表,控制器在模糊控制规则下根据检测到的不同的e和ec再查询模糊规则表求得Kp、Ki、Kd的增量,即系统输出量ΔKp、ΔKi、ΔKd。模糊PID控制器框,如图4所示。
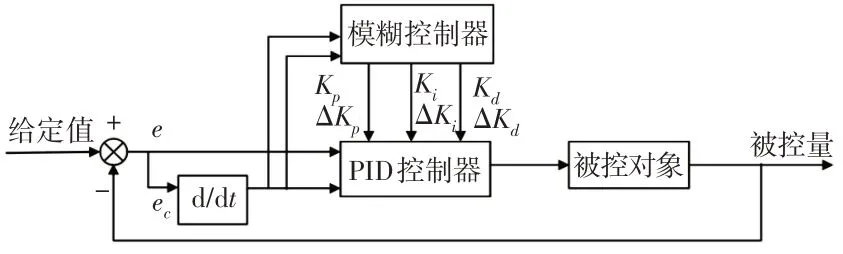
图4 模糊PID控制器框图Fig.4 Fuzzy PID Controller
按照专家以往的经验来制定出模糊控制规则[10],隶属函数选择准确度较高的三角形,输出划分为{NB,NM,NS,ZO,PS,PM,PB}的七个级别的语言变量,则得到ΔKp、ΔKi、ΔKd的模糊控制规则,如表1 所示。其中,ΔKp、ΔKi、ΔKd在模糊控制规则表中依次表示。

表1 ΔKp、ΔKi、ΔKd模糊控制规则表Tab.1 The Fuzzy Control Rules of ΔKp、ΔKi、ΔKd
5 仿真结果及分析
为了证明模糊PID控制算法在两用车多电机协调控制中的有效性和优越性,在Matlab/Simulink平台上搭建了4台永磁同步电机转角协同控制仿真平台,对PID和模糊PID控制算法设计的控制响应进行仿真对比。当给定系统1号电机和3号电机转向角为向左、向右30°时,2号电机与4号电机转向角分别应为向左、向右9.68°。设定仿真系统的转向角分别为如上所述并分别给系统输入阶跃信号和正弦信号,设定仿真时间分别为0.3s和2s,对系统进行建模仿真。
由图5可知,4台电机均在对应的转向角度值稳定收敛。因此,PID算法和模糊PID算法均可实现在偏差耦合控制结构下的多永磁同步电机协同控制且系统超调量较小、同步精度高。在给定阶跃信号下,模糊PID控制器在78ms时系统达到稳定,PID控制器在127ms时系统达到稳定,稳态时间减少了39%。通过对比2种控制算法的给定阶跃信号的输出曲线,与PID控制算法相比,模糊PID算法具有更好的动态特性,系统无抖振现象、响应迅速、稳态精度高。
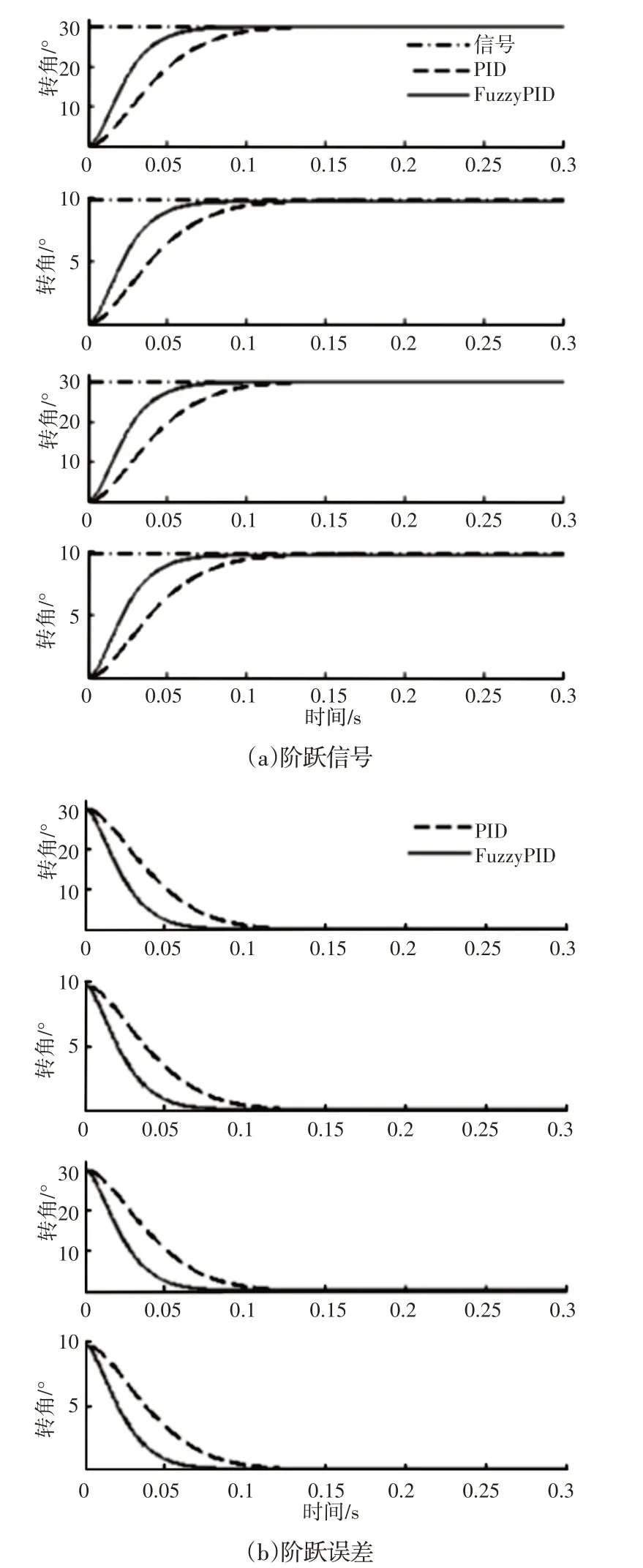
图5 阶跃信号的响应误差曲线Fig5 Response Error Curve of Step Signal
由图6 可以看出,在正弦信号下,模糊PID 控制器在75ms时系统达到稳定,PID 控制器在165ms 时系统达到稳定,稳态时间缩短了55%。系统动态收敛后,模糊PID 控制器的跟踪误差达到0.3°,PID 控制器的跟踪误差达到1°,跟踪精度提高了70%。因此,模糊PID 控制系统具有良好的动态性能和精确的跟踪精度等优点,能够很好地满足并适应多电机协同控制的性能要求。
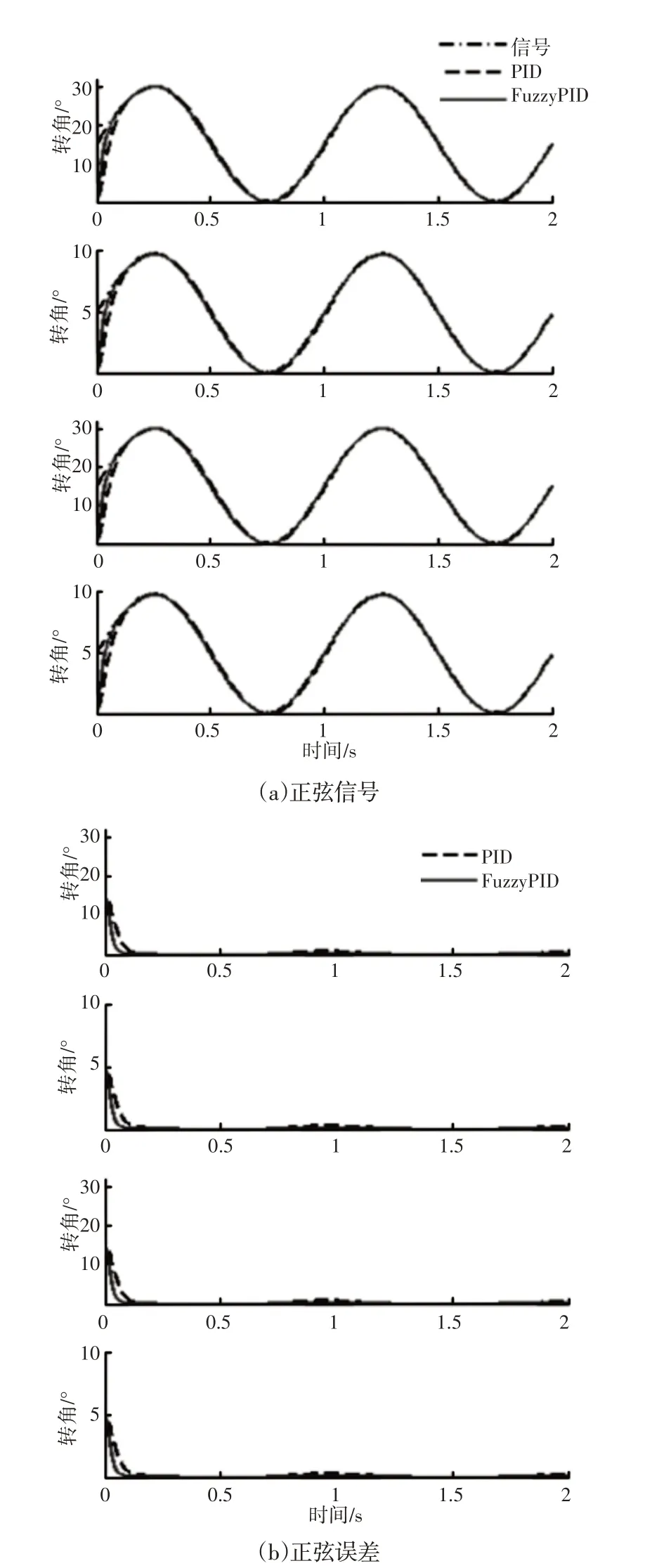
图6 正弦信号的响应误差曲线Fig6 Sinusoidal Signal Response Error Curve
6 结论
(1)针对公铁两用车转向系统多永磁同步电机协同控制的要求,采用偏差耦合控制结构,设计并使用转角协同补偿器,实现多电机转向角的协同控制。
(2)系统采用模糊控制算法,实现了对PID增益的在线调节,使稳态时间缩短了39%,跟踪精度提高了70%。
(3)协同控制策略下的模糊PID控制器能有效的提高多电机控制的稳态精度、响应特性、跟随精度及同步精度,能满足公铁两用车多电机协同控制的使用要求。这里结合智能控制算法和协同控制理论设计的控制策略不仅在公铁两用车领域有重要的作用,同时也为四轮独立转向驱动系统进一步研究提供了借鉴意义。
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
中国核电(2021年3期)2021-08-13
减速顶与调速技术(2020年3期)2021-01-18
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
廉政瞭望(2017年21期)2017-12-07
解放军健康(2017年5期)2017-08-01
知识经济·中国直销(2016年2期)2016-11-07
系统医学(2016年8期)2016-02-20
铁道运营技术(2015年3期)2015-12-23