线控转向系统关键技术综述
2022-01-14 07:15朱永强宋瑞琦姚俊明
科学技术与工程 2021年36期
朱永强,宋瑞琦,刘 贺,姚俊明,刘 硕
(1.青岛理工大学机械与汽车工程学院,青岛 266520;2.清华大学车辆与运载学院,北京 100080)
转向的舒适性推动了汽车转向系统的发展,液压助力转向系统最早替代了操纵繁重的机械转向系统,得益于电力电子技术的发展,电动助力转向系统(electric power steering system,EPS)又进一步替代了液压助力转向系统。然而液压助力转向和电动助力转向均是随驾驶员施加的手力矩被动提供转向助力,无法主动执行转向功能,从而难以满足汽车智能化的发展趋势。车辆的主动安全技术以及自动驾驶技术推动了主动转向技术的发展,主动前轮转向和线控转向可以根据驾驶员的指令和当前车辆状态,同时控制转向力矩和车轮转角[1-3]。其中线控转向作为下一代转向技术,具有诸多无可比拟的优点。
在车辆的操纵稳定性方面,线控转向可根据驾驶需求提供不同的手感,同时线控转向由于取消了转向管柱以及中间轴,转向指令执行模块与路感反馈模块分开,通过方向盘转角与车轮转角的传动比控制,可以提高低速行驶的灵活性以及高速行驶的稳定性。在车辆的生产制造方面,线控转向可以减小转向系统的传动空间,便于动力装置的布置,左驾驶车型与右驾驶车型的通用性也更加容易实现,搭载线控转向系统的车辆更加容易装配,此外线控转向系统的模块化,使得同一套转向系统可以搭载在不同的车型上,减少了转向系统设计和制造成本。在车辆被动安全方面,搭载线控转向系统的车辆由于没有转向管柱,从而大大提高车辆碰撞时的被动安全性[4-5]。对汽车智能化发展而言,线控转向可以对人机界面进行自定义,以适应驾驶员期望的转向操纵性,实现定制化的需求,线控转向技术可以更好地服务于高级驾驶辅助系统,如自动泊车功能,车道保持功能,紧急避障功能等,此外线控转向同线控驱动、线控制动和主动悬架协同控制,可进一步提高底盘的安全性、稳定性和舒适性,随着自动驾驶技术的发展,线控转向与线控制动是实现轨迹跟踪和紧急避撞的关键技术。
将梳理归纳当前线控转向系统中的关键技术,并对线控转向技术的未来发展趋势进行探讨。
1 线控转向结构组成
线控技术最早用于飞控系统,自20世纪90年代之后,各大整车厂以及零部件厂商逐渐设计出线控转向系统的原型进而推出搭载线控转向系统的概念车。2000年,美国德尔福公司提出线控转向的系统安全设计过程。2004年,德国采埃孚公司与宝马公司共同设计了一款基于行星齿轮的主动前轮转向系统。同年,美国天合汽车集团提出了线控转向解决方案的两个阶段,第一个阶段是保留机械备份,第二阶段是研究高可靠的容错冗余架构,摒弃机械备份以保留线控转向的被动安全优势。2007年,美国伟世通公司设计基于双转向执行电机的线控转向系统。2013年,英菲尼迪推出搭载线控转向系统的量产车Q50,此套系统含有3组电子控制单元、电磁离合器,双转向电机。为了提高安全性,英菲尼迪提供了机械备份,当发生严重故障,电控单元控制电磁离合器,使得转向器的小齿轮与方向盘接合,恢复机械转向连接,退化到电动助力转向功能或机械转向功能。2017年,耐世特汽车系统公司研制出随需转向系统和静默方向盘系统,在模拟真实路感的同时,可为驾驶员提供能够适配从运动型到豪华型等各类车型的转向手感,同时实现自动紧急转向功能,提高车辆的操纵稳定性和安全性。2018年,博世在奥迪A3安装线控转向系统进行绕桩试验以及U型弯道试验,试验过程中采用可变传动比,转向快速而直接,验证线控转向可以大大提高车辆转向的灵活性[6-7]。
线控转向系统组成如图1[8]所示。线控转向系统在工作的过程中,转向盘和转向执行器之间没有机械连接,根据转向功能可以划分为路感模拟子系统,转向执行子系统,控制器及线束子系统,电源子系统4个部分。

图1 线控转向系统组成[8]Fig.1 Steer-by-wire system layout[8]
路感模拟子系统由方向盘、路感反馈电机、扭杆、转矩转角传感器和蜗轮蜗杆减速器组成;转向执行子系统主要包括转向执行电机、齿轮齿条减速器、齿条位置传感器和转向拉杆;控制器及线束子系统主要包括路感反馈控制器、转向执行控制器、通讯总线线束及相关传感器线束。路感反馈控制器获取车辆运动状态信息(如车速、横摆角速度和轮速信号等)、转向执行控制器信息(齿条位置和转向电机电流等)、方向盘转角和方向盘转矩信号,通过控制路感反馈作动器实现路感反馈功能、方向盘主动回正功能以及更高级的行车功能(如车道保持功能);转向控制器接受方向盘转向指令和车辆状态信息,对车辆行驶状态和驾驶员指令进行判断,可以实现随动转向功能,在智能化较高的车辆上,可以实现紧急避障功能、自动泊车和主动前轮转向等高级功能。在功能安全方面,在各个控制器中都要实现故障诊断、冗余切换和传感器信息诊断功能[9]。
线控转向系统的设计需要在舒适性、安全性以及成本上均衡,从而提出多种系统构型。典型构型可以根据是否有机械备份、转向执行电机的数量、路感反馈作动器的选择,转向轮的布置和电机的绕组数量进行分类。机械备份是采用电磁离合器实现的,主要有两个功能,一是安全冗余的功能,二是方向盘零位对正的功能。为了提高转向的功能安全级别,目前有两种提高转向电机安全性的方法,第一种利用双电机转向器替换当前的单电机转向器,另一种方法是增加单电机的绕组数,利用六相永磁同步电机替换当前的三相永磁同步电机。近年来,为了提高车辆的动力学性能和安全性,提出多种转向形式,包括前轮独立转向[10]、后轮随动转向[11]、四轮独立转向[12]以及差动转向[13]。
2 路感反馈控制策略
路感反馈控制策略分为反馈力矩计算和主动回正两个部分。反馈力矩计算分为路感反馈力矩计算和力矩控制两层;主动回正包括回正逻辑判断和回正过程控制。
2.1 反馈力矩计算
路感反馈控制的目的是让驾驶员转向操纵轻松且稳定,同时让驾驶员感受到车辆的行驶状态和路面情况,以便于驾驶员做出更佳的转向策略。转向系统经过多年发展,机械转向最真实但不舒适,液压转向和电动助力转向保留部分真实路感,通过设计助力曲线让转向变得更加舒适。线控转向路感反馈需要一定的保真模型以保证转向的真实性和舒适性。得益于电力电子技术的发展,电机的响应带宽和控制精度大大提高,使得模拟出上述的路感是完全可行的[14]。路感反馈控制策略可以分为两层,第一层是路感反馈力矩计算,第二层是路感反馈作动器闭环控制。电机电流闭环控制的方案相对成熟,路感反馈力矩计算一直是研究的重点。路感反馈力矩计算需要多方面的考虑,如信号计算的实时性、快速性、降低手感波动和反映真实路况等。路感反馈力矩由3个部分组成,理想路感反馈力矩、机械系统补偿力矩和主动回正力矩。理想路感反馈力矩计算方法主要包括4种。
第一种是传感器测量的方法,通过传感器测量齿条力大小,齿条力中包括路面条件、回正力矩以及轮胎特性等信息,从而保证路感的真实性[15-17],然而力传感器的价格昂贵,转向系统的成本增加。
第二种是参数拟合的方法,有直接构建反馈力矩关于方向盘转角或者是方向盘转角和方向盘转速的MAP图,常常用于驾驶模拟器等简单的应用场景[18]。也可以选取车速信号和方向盘转角信号两个参数,定义反馈力矩和方向盘转角存在可变刚度,同时把反馈力矩设计成车速的多项式函数,形成反馈力矩关于车速和方向盘角度的MAP图,达到转向低速轻便性和高速稳定性的效果[19]。反馈力矩计算还可以模块化,由主要反馈力矩,摩擦力矩,阻尼力矩,惯量力矩以及主动回正力矩组成:主要反馈力矩由齿条力、车速信号和转向模式得到,其中转向模式分为舒适模式、运动模式以及正常模式;摩擦力矩,阻尼力矩,惯量力矩和主动回正力矩由转向系统的方向盘转角转速以及驾驶员力矩得到,这种分模块叠加得到反馈力矩的方法,有利于对手感的调节[20]。参数拟合的方法计算简单,实时性高,但缺乏路面信息和真实工况的反馈。
第三种是车辆动力学计算法,通过获取车辆运动状态信息,计算得到反馈力矩。部分学者估算轮胎回正力矩及设计助力系数计算得到反馈力矩[21]。估算回正力矩主要存在2类方法,第1类通过质心侧偏角估计,结合车辆横摆角速度、车速和方向盘转角信号得到轮胎侧偏角,利用经验轮胎模型得到轮胎回正力矩;第2类是通过多体动力学软件与MATLAB/Simulink联合建模,利用悬架和轮胎的弹性动力学计算得到轮胎回正力矩,再结合转向系统的动力学模型计算出反馈力矩[22]。
第四种是齿条力估计法,采用齿条力估计法有两个原因,单纯由车速信号和方向盘转角信号或者是车辆状态信息得到的反馈力矩,驾驶员无法从手感中判断路面信息,甚至是碰到减速带和路缘,驾驶员也无法做出正确的判断;另一方面是力传感器的成本较高,采用电流传感器和齿条位置传感器成本较低,用转向执行电机电流和齿条位置估算齿条力可以达到齿条力观测精度和快速性需求,然后结合电动助力转向的助力策略计算出反馈力矩[23]。齿条力估计法,可以反映真实路面,实时性较好。
2.2 路感评价
转向路感客观评价一直是重要的挑战,有学者将转向过程分为驾驶员主导的转向阶段和车辆主导的转向阶段。对应上述两个转向阶段,设置了四个准则[24]。前两个准则设定在驾驶员主导转向阶段,反馈力矩应在驾驶员打算转弯时告知驾驶员线控系统被激活;当驾驶员进入稳定的弯道转向,反馈力矩应当告知驾驶员转向过程完成;第三个准则产生于车辆主导转向的过程,反馈力矩应始终如一地引导驾驶员返回直线行驶状态;最后的准则设定转向的所有过程,即反馈力矩在任何驾驶条件下,不能影响驾驶员的转向操纵感[25]。除了上述相对定性的客观评价,定量的客观评价包括转向灵敏度、回正能力、中心位置感觉,转向力矩线性度、有效力矩刚度和最大转向力矩[26-28]。
路感反馈作动器扭矩控制的评价标准是反馈力矩的跟随性及路感模拟子系统的鲁棒稳定性。为了提高反馈力矩的跟随性,主要有开环控制和闭环控制两种方法,如图2所示,开环控制利用方向盘转角和转矩信号产生前馈补偿力矩,用以补偿机械系统固有摩擦力矩、阻尼力矩和转动过程引起的惯量力矩[3]。闭环控制系统的设计要更加复杂,转向力矩传感器比较灵敏,作为反馈容易使转向系统震荡。扭矩闭环的控制方法多采用比例积分控制方法,结合前馈控制实现更好的控制效果[16];也有采用滑模控制方法实现期望扭矩跟踪。扭矩闭环系统由两个环路组成,一个是执行器扭矩闭环,另一个是驾驶员决策闭环。有研究者考虑驾驶员的神经肌肉力学,建立基于肌肉力学模型的驾驶员模型,设计出符合人因工程学的反馈手感[29-30]。在线控转向系统中,方向盘转角和方向盘转矩是解耦的,定义方向盘转矩到方向盘转角的传递函数为输入阻抗,可以利用输入阻抗的相频特性和幅频特性进一步判断反馈力矩的稳定性和品质。
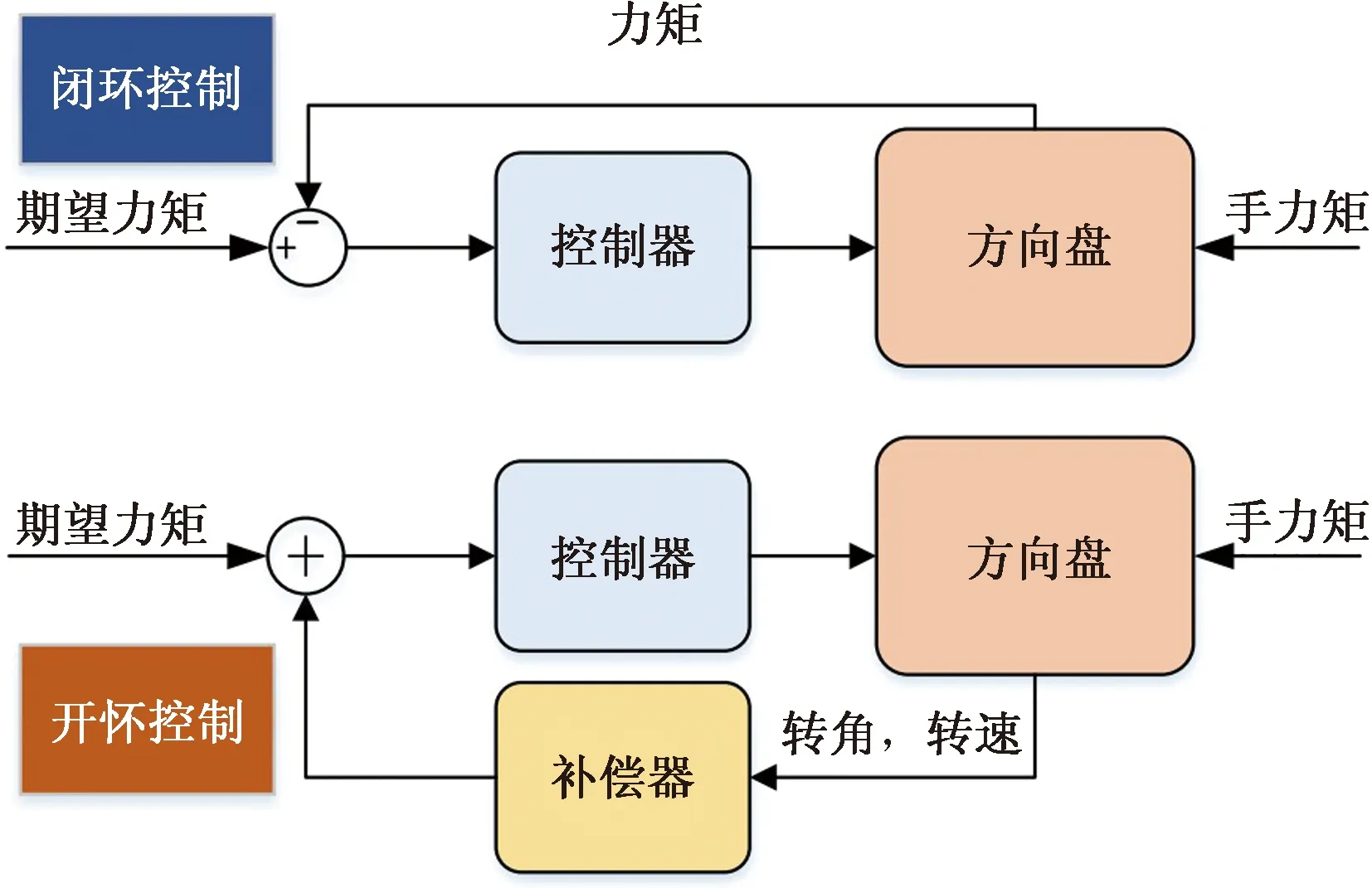
图2 手力矩闭环与开环控制Fig.2 Steer feeling closed-loop and open-loop control
2.3 主动回正逻辑设计
主动回正逻辑如图3所示,车辆低速行驶时,反馈力矩小,车辆趋于回正不足;在高速行驶时,车辆横摆阻尼减小,车辆趋于回正超调[31]。
转向系统具备回正功能,可以减少驾驶员的转向负荷,回正功能包括回正逻辑判断和回正过程控制[32]。回正逻辑判断要求准确,滞后小,回正判断条件包括驾驶员手力变化、方向盘转角大小及转速方向,分为撒手回正和手扶方向盘回正。回正过程要求平顺、快速,高速行驶不能回正超调,低速行驶避免回正不足。在改善车辆的回正性能下,确保不影响驾驶员操纵手感。有研究者采用扩展Kalan滤波对车辆的附着系数进行实时估计,从而根据路面附着情况精细的调节回正电流,进行回正控制[33]。
3 转向执行控制策略
3.1 位置伺服控制
转向执行控制器转角指令来自驾驶员和车辆稳定性控制器,驾驶员转动方向盘实现循迹的目标,车辆稳定性控制器为实现可变传动比和主动前轮转向的功能,修正驾驶员的转角指令。然后转向执行控制器控制转向作动器实现转角伺服的功能。乘用车转向作动器的选择包括直流电机、直流无刷电机、永磁同步电机[34]。
永磁同步电机的功率密度高、扭矩波动小及输出扭矩大,逐渐成为转向执行器的第一选择,为满足所有工况,转向电机的功率需在500~1 000 W。位置跟踪控制是相对成熟的技术,但是车辆是高速运动物体,情况复杂,导致转向负载变化较大,位置跟踪控制器需有较高的鲁棒性及自适应能力。常见的控制方法仍然是比例-积分-微分控制(proportional-integral-derivative control,PID),为了提高位置跟踪的精度和快速性,部分研究者在PID控制的基础上引入负载观测器[35-37]。位置跟踪控制通常包括位置-转速-电流三环。为了进一步提高位置跟踪的性能,众多研究者采用滑模控制、自适应控制、自适应滑模控制、模糊控制、模型预测控制、鲁棒控制及神经网络等智能控制方法[38-45]。智能控制算法用以提高系统的鲁棒性、稳定性、准确性以及快速性。如图4所示,其中基于模型的智能控制方法为降低反馈增益及减小外部模型的干扰,增加负载观测器充当前馈通道。观测器的设计采用鲁棒观测器、滑模观测器、卡尔曼滤波、扩展卡尔曼滤波以及最常用的低通滤波和高通滤波方法[46-48]。

图4 基于观测器的转角闭环控制Fig.4 Steering control loop based an observer
3.2 双电机协同控制
在线控转向系统中,方向盘与轮胎之间没有机械连接,传感器和作动器发生错误可能会导致转向失败。有些研究者采用双电机框架来提高转向系统的安全性。双电机转向系统,可以在单点故障时候,继续维持转向系统;另外双电机协同工作可以提供更大的扭矩,可以用于轻型商用车[49]。双电机的控制策略分为两种,第一种是主从控制(master-slave)的形式[50],当主电机失效,从电机可以快速准确的接管,从电机干预时间远小于驾驶员反应时间,对驾驶员的操纵感觉影响较小;第二种是双电机协同控制,协同控制的难点是速度同步。利用两执行电机的速度偏差得到偏差电流叠加到双电机执行器上,从而实现良好的速度同步效果[51-53]。双电机的控制逻辑如图5所示。

图5 双电机协同控制Fig.5 Synchronization control of dual-motor system
转角执行跟踪的评价方法主要有时域和频域两种评价方法。在时域上,包括稳态误差、最大转角速度、上升时间等参数。在频域上,包括带宽、剪切频率、稳定裕度以及稳态幅值增益等参数[54]。
4 主动前轮转向控制策略
在电动助力转向中,方向盘和前轮之间存在机械连接,主动转向控制和驾驶员的转向操纵之间存在干扰;在线控转向中,驾驶员转向操纵与前轮转向分开,易于实现主动前轮转向的功能。相对于直接横摆力矩控制,主动前轮转向在不影响纵向运动的同时改变侧向和横摆运动,可以提高驾驶的舒适性。主动前轮转向是基于驾驶员意图的提前主动控制策略,如在对开路面制动,可以减小制动距离、减小侧向距离偏移、减小横摆角的残留及降低驾驶员的操作负担。主动前轮转向可以用于优化轮胎侧向力,以保证在紧急转向中更多轮胎附着力可以用于纵向运动控制,从而提高车辆在紧急工况下的稳定性[9]。主动前轮转向主要存在于紧急工况,体现于瞬态过程。为了提高正常工况的操纵性,可变传动比也是一种重要的转向策略。
4.1 可变传动比
当车辆传动比几乎是固定值,在车辆低速行驶时,较大的方向盘角度会增加驾驶员的工作量,特别是在方向角变化较大的操纵(如泊车)情况下;在高速行驶时,相对较小的转向角输入会产生较大的侧向加速度,而较大的侧向加速度增益需要驾驶员进行更为细致的转向操作,以维持车辆的直线行驶和换道行为,增加精神上的负担。在线控转向系统中,转向系统的传动比被设计随车速变化,可以提高车辆在低速和高速行驶下的操纵性。可变传动比的设计要参考方向盘转角大小,在恒定行驶车速下,横摆角速度增益随着方向盘转角的增大而减小,会降低转弯时的操纵性,从而传动比的设计也要随方向盘转角动态变化[55-59]。图6[60]为可变传动比的MAP图。
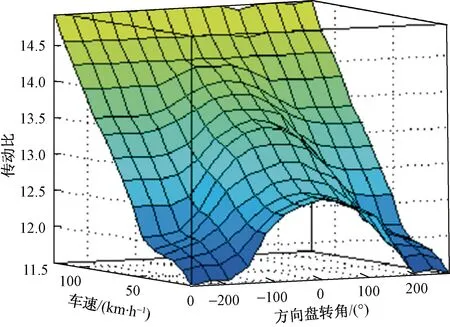
图6 可变传动比MAP图[60]Fig.6 Variable steering ratio MAP[60]
4.2 车辆稳定性控制
车辆稳定性控制分为三步:一是参考模型的选取,二是被控参数的选取,三是控制方法。
参考模型的选取主要是线性二自由度模型,为了提高参考模型在轮胎非线性的真实性,有学者提出基于经验轮胎模型的非线性二自由度模型和多自由度非线性模型。为了提高被控参数跟踪的平顺性,在参考模型输出后加上一阶惯性环节或者二阶阻尼环节。被控参数选取一般为横摆角速度,质心侧偏角和侧向加速度[61-63]。为了应对复杂行驶工况、参数时变及被控对象的不确定性,越来越多的控制方法用于侧向稳定性控制中。Yoon等[64]采用主动前轮转向和主动侧倾力矩控制,同时控制横摆运动和侧倾运动,提高侧向运动的稳定性和防侧翻的能力。Ataei等[65]提出了一种基于四轮独立线控转向的控制架构,通过单通道设计方法将多输入多输出解耦成横摆角速度和质心侧偏角的单独控制过程。Ding等[66]、Zhang等[67]、Zhao等[68]采用李雅普诺夫直接法设计控制系统,将主动前轮转向和直接横摆力矩自适应集成控制,利用侧偏刚度的自适应变化,确保集成控制器的鲁棒性,最后用仿真证明集成控制可以提高低附路面行驶和紧急避撞情景下的车辆稳定性。Kritayakirana等[69]提出了虚拟中心点的概念(center of percussion,COP),用以简化后轮的动态,从而简化前馈转向控制器的设计并提高控制器鲁棒性,利用李雅普诺夫方法验证系统的渐近稳定性,确保车辆的侧向稳定性以及轨迹跟踪的能力。文献[70-72]将四轮独立驱动和线控转向系统结合,考虑执行器的实际动态性,分析运动控制器在线性和非线性区域的性能表现,通过转向控制器和滑移率控制器协同控制纵向运动和横摆运动。文献[73-75]在线控转向、线控驱动及线控驱动集成系统中,采用增益调度H∞控制,以应对转向系统干扰和车速以及轮胎侧偏刚度时变的问题,改善参考横摆角速度的跟踪性能。图7[76]为集成控制。
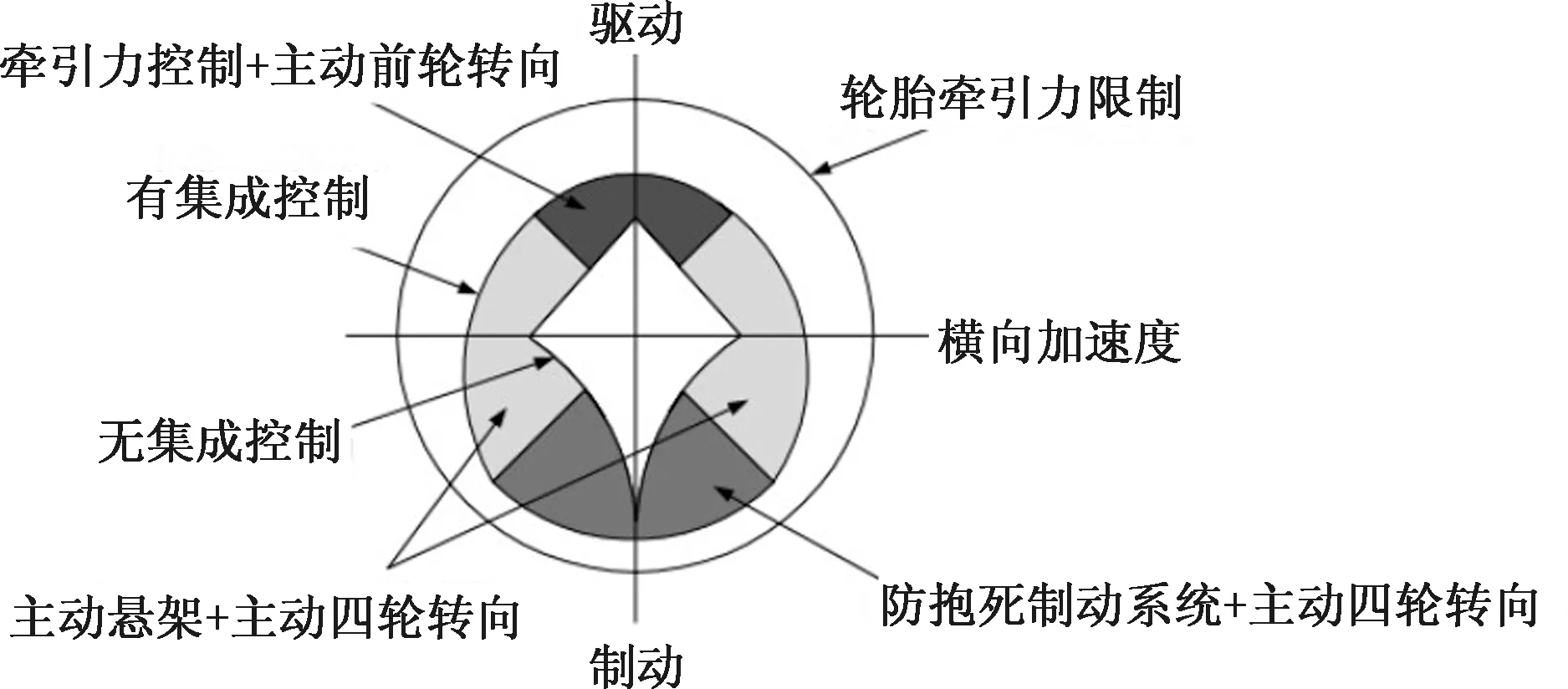
图7 集成控制[76]Fig.7 Integrated control[76]
随着底盘一体化概念的提出,如图8所示,车辆稳定性控制不再是转向或制动一个系统的责任,转向-制动-悬架协同控制逐渐被用于车辆稳定性控制策略中,协同控制可以进一步车辆的操纵性和极限工况下的稳定性。
5 功能安全架构设计
汽车线控转向系统虽然有诸多优势,但是安全可靠性是制约其大规模实际应用的关键问题之一,线控转向系统的突发失效会导致严重的行车安全事故。ISO26262 道路功能安全标准 ISO.Road vehicles Functional safety:ISO 26262提出汽车电子电气系统的汽车安全完整性等级要求(automotive safety integrity level,ASIL),ASIL 共分为 A、B、C、D 4个等级,ASIL-D对随机硬件故障率的要求为小于10FIT[77]。线控转向系统属于与汽车安全高度相关的系统,要达到 ASIL-D级别,这对线控转向系统的安全性将是巨大的挑战。线控转向系统的功能安全架构需要复杂完整的过程,首先需要进行危害分析,可以根据危害发生频率和严重程度两个维度对不同危害进行分类;然后是建模与仿真、故障树分析、失效模式与影响分析(failure modes and effects analysis)和故障注入测试等。
线控转向功能安全架构设计分为两个方面,冗余架构设计、故障诊断及应对。冗余架构设计取决于故障及危害分析,可以进行定性和定量分析。定性分析包括失效模式及影响分析,分析方法包括事件树分析和故障树分析两种;定量分析包括可靠性框图分析、马尔科夫过程分析和动态故障树分析3种方法。冗余方案包括被动冗余和主动冗余两种方案,被动冗余方案中的冗余部分作为备份,只有系统出现故障时才工作;主动冗余方案中的冗余部分与系统并行工作。冗余分为硬件冗余和软件冗余,硬件冗余包括执行器冗余、传感器冗余、电子控制单元冗余、通信总线冗余、电源冗余、机械系统备份;软件冗余主要容错控制算法和软件层面的冗余[78-80]。执行器冗余在路感反馈上采用双路感反馈作动器,在转向执行上采用双转向电机;传感器冗余有多个并行传感器或者观测算法与传感器冗余,如车辆运动状态观测器、无传感器矢量控制算法等;电子控制单元冗余有两种形式:一种是伴随着执行器冗余的伺服控制器冗余,第二种是单板中的冗余设计,包括多核主芯片、Stand-by芯片、双电源芯片和双驱动电路;通信总线冗余,通常是两路总线设计或者多种总线(CAN,FlexRay)设计;电源冗余包括多电源模块或者多种电压系统(12 V/48 V电压)[81-82]。
6 线控转向系统关键技术展望
线控转向是线控底盘和自动驾驶的关键技术,为了进一步促进线控转向技术的发展,可在以下4个方面进行进一步的研究。
(1)真实舒适。路感规划力求将路面及车辆行驶状态的真实信息传递给驾驶员,车辆行驶状态信息可以由车辆自身的传感器测量得到,路面信息(甚至是碰到减速带和路缘)准确获取是路感模拟真实可靠的关键所在,如何建立更加精确的车辆动力学模型,进而提高路面信息反馈的有效性和准确性。同时线控转向路感反馈策略需要大规模的验证和调校,从而形成一套真实舒适的路感反馈算法架构。
(2)精准快速。为提高转角跟踪控制的快速性和稳定性,设计基于模型的智能控制算法是提高转角跟踪稳定性的重要途径;双电机速度同步控制技术需要进一步完善,以提升高速行驶下转角跟踪稳定性;线控转向的可变传动比,通过设计驾驶员转角输入与前轮转角输出的对应关系,进而发挥线控转向设计灵活的特点。
(3)安全可靠。为了达到ASIL-D的功能安全级别,在硬件上,需采用双转向电机或六相电机提高转向系统的容错能力,同时,芯片性能、电机控制技术和传感器精度的提高,也为线控转向系统的可靠性和稳定性提供强大的硬件基础。在软件上,需要研发出高效的工具链,提高代码的规范性和安全性。
(4)集成控制。在底盘一体化的趋势下,需要重新定义转向系统的功能及转向和制动、驱动及悬架系统的关系,以提高车辆动力学的边界,底盘集成控制可以进一步提高车辆的操纵性和极限工况下的稳定性。
7 结论
针对线控转向系统的发展趋势和关键技术进行了简要概述,并从线控转向的发展概况谈起,之后分别针对线控转向系统关键软硬件技术进行了归纳整理,包括对比分析了4种路感反馈策略、智能算法在位置闭环的应用及双电机协同控制策略等转角闭环控制、基于线控转向中主动前轮转向的车辆稳定性控制研究、面向功能安全方面的软件冗余方案和硬件冗余方案进行了详细的介绍与分析。最后对线控转向系统的关键技术进行展望,指出线控转向系统将朝着真实舒适、精准快速、安全可靠和集成控制的方向发展。
猜你喜欢
汽车之友(2021年23期)2021-12-24
今日农业(2020年16期)2020-12-14
模具制造(2019年10期)2020-01-06
红土地(2019年10期)2019-10-30
电子制作(2018年9期)2018-08-04
汽车工程师(2018年3期)2018-07-12
中国建筑金属结构(2018年4期)2018-05-23
汽车零部件(2014年5期)2014-11-11
清风(2014年10期)2014-09-08