
QM70型多功能撬毛机器人的研制及应用
2022-01-15 02:49颜武刚代建龙
中国新技术新产品 2021年21期
颜武刚 王 凯 代建龙
(湖南创远高新机械有限责任公司,湖南 长沙 410205)
0 引言
目前,国内大部分地下矿山是通过人工手持撬棍开展撬毛作业的,该方法具有劳动强度大、危险系数高以及效率低等缺点。并且受作业工具和经验的限制,有时会存在浮岩清理不彻底的情况,留下的事故隐患将威胁下道工序的作业安全[1]。
为了解决人工撬毛作业所面临的安全问题,国内部分地下矿山逐渐用撬毛台车替代人工清除浮石,撬毛台车是用于井下撬毛作业的机械化设备,主要分为冲击式和刮削式2种,前者主要用于硬岩,后者主要用于软岩[2]。国内的撬毛台车均以冲击式为主,通过破碎锤的机械冲击清除浮岩毛石,机械冲击破碎清理方式对岩壁冲击震动大,撬毛过程的冲击震动容易引起岩壁的意外崩塌[3]。国内现有的撬毛台车是以地下铲运机、凿岩台车等底盘为基础进行优化设计而成的,因此其行走方式均为胶轮式,无法爬到爆堆上面进行撬毛作业。同时,整机尺寸较大无法适应国内低矮型地下矿山的使用需求。
鉴于国内地下矿山撬毛作业的现状及国家对智能矿山建设的需求,该文研制开发出了一种结构紧凑、机动灵活、功能齐全且适用于国内低矮型地下矿山的撬毛机器人。
1 QM70型撬毛机器人整体设计思路
为了解决具有不同硬度岩石的低矮型地下矿山撬毛作业的问题,所研制的撬毛机器人搭载了独特的多功能作业属具,通过一键切换开关就能轻松地对软硬岩开展撬毛作业;为了能够在浅孔留矿法的撬毛作业中使用,撬毛机器人采用履带底盘[4-5];为了实现远程可视化撬毛作业,整机在转台的前后部分别设置了带云台的360°高清摄像头和可变焦摄像头,通过5G网络能够实时地将视频画面传至远程遥控中心;为了减少动力排放对井下空气的污染,节省通风费用,整机采用电驱[5]。
2 QM70型撬毛机器人计算分析
撬毛机器人技术性能参数设计及选择的依据是撬毛机器人适用的条件[3]。撬毛机器人主要是针对国内低矮型地下矿山而研制的,要求方便下井及转运,并且能够适应不同的采矿工艺;功能上必须满足撬毛、大块破碎及地面平整的需求。根据设计要求,撬毛机器人的主要技术性能参数见表1。

表1 撬毛机器人主要技术性能参数
为了实现模块化设计和提高元器件的通用性,QM70型撬毛机器人拟借用相近吨位的凿岩机器人的回转支承、减速机总成及履带底盘总成,相关技术参数见表2、表3。
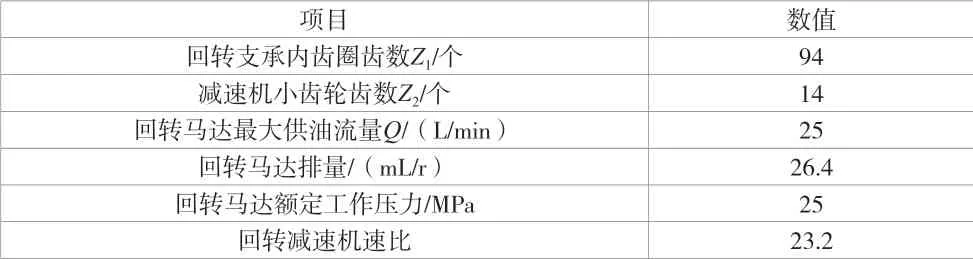
表2 回转支承及其减速机总成技术参数

表3 履带底盘总成技术参数
2.1 上转台回转系统计算
上转台主要包括电机泵组、电控柜、电缆卷筒、液压油箱以及覆盖件等,质量约2.8 t;臂架及作业属具的质量约1.3 t,因此,回转机构驱动上转台回转时一共需要克服约4.1 t的质量。
2.1.1 上转台转速计算
回转机构速比I,如公式(1)所示。

式中:I0为回转减速机速比;Z1为回转支承内齿圈齿数;Z2为减速机小齿轮齿数。
上转台回转转速n,如公式(2)所示。

式中:Q为回转马达最大供油流量,L/min;η为马达容积效率;q为回转马达排量,mL/r。
n=(25×1000×0.94/26.4)/155.8=5.7 r/min>3.0 r/min,满足设计要求。
2.1.2 回转力矩计算
上转台起动力矩MQ如公式(3)所示。

式中:P为马达启动工作压力,MPa;η总为传动系统机械效率,η总=η马达×η减速机×η回转支承=0.95×0.92×0.98=0.85。
受摩擦力、效率以及出口油压的影响,液压制动、制动力矩与起动力矩之比C如公式(4)所示,MZ如公式(5)所示。

回转减速机实际制动力矩MZ0如公式(6)所示。

式中:MZ1为回转减速机制动力矩,N·m。
MZ0= 116×155.8×0.92×0.98=16291.4 N·m>10813.7 N·m,满足正常工作时的回转制动要求。
2.2 行走系统计算
为了保证设备能够正常通过,采用履带底盘,整机质量为6.5 t,设计动力系统时,须保证平路及30°坡道的行走能力。
2.2.1 最大牵引力计算
行走马达最大输出扭矩M1如公式(7)所示。

式中:P1为行走马达额定工作压力,MPa;q1为行走马达最大排量,mL;ηm1为行走马达机械效率。
单个驱动轮的最大输出扭矩M2如公式(8)所示。

式中:Im为行走减速机速比;ηm2为行走减速机机械效率。
单条履带的最大牵引力F如公式(9)所示。

式中:R为驱动链轮基圆半径,mm;ηm3为驱动链轮机械效率。
驱动链轮基圆半径R如公式(10)所示。

式中:t0为驱动链轮节距,mm; z为驱动链轮齿数。
整机最大牵引力F0如公式(11)所示。

2.2.2 爬坡能力计算
爬坡时整机须克服以下阻力:1) 自重在斜坡方向分力WP=Gsinα(G为撬毛机器人自重;α为斜坡角度)。2) 运行阻力WY=0.12Gcosα。3)履带内阻力Wn=0.06G。则最大牵引力应不小于这些阻力的和,即F0≥WP+ WY+Wn;此外,还应保证撬毛机器人在爬坡时不打滑,即需要满足公式(12)。

式中:F1为实际需要的牵引力,kN;φ为履带板与地面的附着系数,φ=0.8。
由此,可得公式(13)、公式(14)。

令φGcosα= G(sinα+0.12cosα+0.06),得α=31.4°。
因此,设计的牵引力满足爬31.37°斜坡的要求。
φGcosα=0.8×6.5×9.8×cos31.37°=43.3 kN>42.5 kN;因此,撬毛机器人在爬31.37°的坡角时不会打滑。
α=31.37°>30°,满足设计要求。
2.2.3 原地转弯能力计算
撬毛机器人原地转弯阻力W由2个部分组成,一部分为履带在地面的转弯阻力W1,另一部分为履带的内阻力W2,得公式(16)。

式中:μ为履带对地面接触阻力系数,μ=0.55。
W=(0.80×0.55+0.06)×6.5×9.8=31.85kN< F0=47.2 kN;因此,撬毛机器人在一般路面能实现原地转弯。
2.3 液压系统计算
液压系统主要包括液压泵、回转马达、行走马达和破碎锤等液压原件。经分析,行走和破碎锤是功率需求最大的工况,而回转马达、行走马达是借用的通用件,因此只需要计算液压泵和破碎锤的功率。
2.3.1 破碎锤功率计算
破碎锤需要兼顾撬毛和大块二次破碎,并根据岩石平均硬度f9选用BLTB75型破碎锤,技术参数见表4。

表4 BLTB75型破碎锤主要技术参数
极限破碎功率WP=QP×PP/60=90×15/60=22.5 kW(QP为破碎锤工作流量;PP为破碎锤工作压力)。
2.3.2 液压泵计算
为了减少发动机排放给地下矿山造成的空气污染以及降低排风费用,动力采用电机(380 V/50 Hz;1 480 r/min);为了节能,选用负载敏感液压泵和电比例负载敏感多路阀。经过对工况的分析,除了破碎锤之外,行走所需要的流量和压力较大。其中,平路行走所需要的流量最大,爬30°坡所需要的压力最大。
平路行走流量计算QB如公式(17)所示。

式中:nB为平路行走时马达转速,r/min;q2为行走马达半排量,mL/r;μmv为行走马达容积效率;nd为履带行走转速,r/min;V1为行走速度,km/h;Rd/Cd为履带半径/周长。
3 QM70型撬毛机器人组成及特点
3.1 QM70型撬毛机器人组成
QM70型撬毛机器人主要由机械结构部分、智能控制系统和液压系统3个部分组成:1) 机械结构部分由履带底盘、转台、臂架系统和作业属具等组成,如图1所示。2) 智能控制系统搭载了机器人控制模块,可实现数据存储、报表生成、远程监测、数字显示、智能自主作业和故障诊断等功能。3) 液压系统为负载敏感系统,通过负载敏感泵搭配带阀后补偿功能的电比例多路阀,既能够控制各个执行机构精准的动作,又具有抗流量饱和的功能,即使在流量不足的情况下依然可以通过精确复合动作实现高精度的定位。
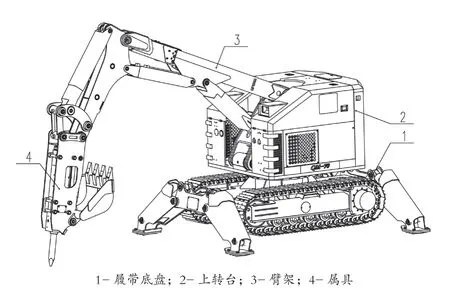
图1 多功能撬毛机器人总体结构
3.2 QM70型撬毛机器人特点
QM70型撬毛机器人的特点如下:1) 集成冲击、刮削于一体的智能化作业属具系统可轻松地开展软岩刮削作业、硬岩冲击作业,根据使用需求通过切换装置实现一键切换,无须来回拆卸和搬运,省时、省心且省力[6],如图2所示。2) 模块化设计。其具有结构紧凑、可拆解安装且转场方便的特点,专为中小型地下矿山研制。3) 多功能。QM70型撬毛机器人可实现落矿后同时对采场进行顶板侧帮撬毛、大块破碎和地面平整,为下一道采矿工序做好准备。4) 作业范围大。QM70型撬毛机器人虽然整体尺寸紧凑,但是作业范围大,如图3所示。
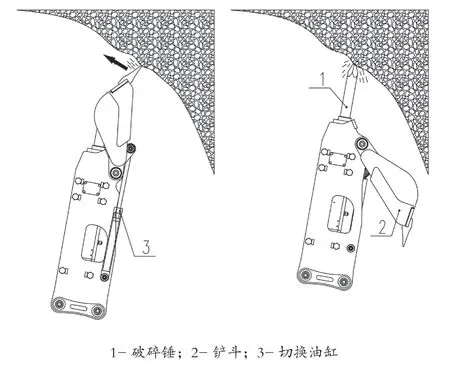
图2 软岩刮削、硬岩冲击撬毛作业示意图
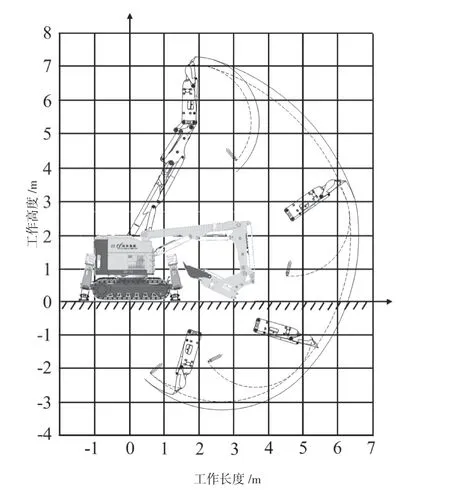
图3 QM70型撬毛机器人作业范围
4 QM70型撬毛机器人应用
湖南创远高新机械有限责任公司联合中国移动为浙江兰溪市金昌矿业有限公司量身打造了浙江省首个智慧矿山,并在-210中段试验智慧采场中成功应用QM70型撬毛机器人开展了撬毛、大块破碎、平地和转场等作业,如图4所示。

图4 撬毛、大块破碎、地面平整及转场作业
5 结语
研制QM70型撬毛机器人的目的是为了提高地下矿山撬毛作业的安全性和作业效率,主要体现在以下3个方面:1) 通过地表集控中心远程遥控QM70型撬毛机器人开展撬毛作业,实现生产过程遥控化、作业室内化,减少了井下工人的数量,进一步提高了作业的安全性。2) 爆破通风大约0.5 h后便可进行撬毛作业,不受炮烟影响,极大地降低了工人的安全风险,提高了设备出勤率和作业效率。3) QM70型撬毛机器人的使用可帮助矿山逐步实现技术队伍知识化的目标。
猜你喜欢
山东冶金(2022年1期)2022-04-19
中国石油石化(2021年8期)2021-03-30
石油化工建设(2019年6期)2020-01-16
小学生导刊(2017年15期)2017-05-17
山东工业技术(2016年15期)2016-12-01
棋艺(2016年4期)2016-09-20
中国塑料(2016年3期)2016-06-15
设备管理与维修(2016年7期)2016-04-09
橡胶工业(2015年4期)2015-02-23
