
多源数据融合构建精细三维模型的关键技术
2022-01-17 06:37邹娟茹孙兴华
地理空间信息 2021年12期
邹娟茹,孙兴华
(1.杨凌职业技术学院,陕西 杨凌 712100;2.陕西省公路勘察设计研究院,陕西 西安 710068)
近年来,我国近地空间对地观测手段日趋成熟,特别是在测绘领域机载LiDAR 点云扫描与倾斜摄影测量技术在三维模型的构建中,发挥着技术革新的作用。然而,基于多学科融合的空间对地观测技术,当某单一测量技术手段发展到一定阶段,可能会遇到不同程度的技术瓶颈,例如,机载LiDAR 虽然能够全天候对复杂地形进行三维点云扫描,且激光脉冲可穿透植被到达地面,形成多波反射,点云数据具有强度信息,但其并不具备光谱属性,地表特征不显著,很难在地质等多领域进行专业性的判读。倾斜摄影测量虽然具有丰富的光谱信息,但其高程精度较差,且在植被茂密的地区,无法采集完整的地形数据。因此,现阶段凭单一测量手段不能在复制地形中完好精细的构建大比例尺三维模型。有许多学者对机载LiDAR 与正射影像进行了融合处理等相关研究,并获取了较为丰硕的成果。尚大帅[8]等运用机载LiDAR 数据与正射影像进行融合测试,成功地将正射光谱赋予了点云数据,弥补了LiDAR 点云缺失光谱信息的缺点;Rottensteiner[9]等研究了从结合航空影像的LiDAR 数据中自动生成建筑物模型的方法;Secord[10]探讨了利用LiDAR 数据得到的DEM 和其对应的影像资料进行特征提取的方法;Thuy[11]等研究了从LiDAR 和影像数据中提取建筑物的多尺度理论;Yang[12]等提出了一种LiDAR 融合航空光学影像的地物分类方法。然而从航测等项目讲,上述模型精细度尚不足,特别在模型侧面纹理结构信息的提取上尤为显著。
因此,本文借助以往机载LiDAR 与正射影像融合的经验,继续加载倾斜摄影数据,进而运用多源数据融合处理,构件精细三维实景模型,这种利用机载LiDAR 点云与倾斜影像的融合,以往学者探讨不多,可借鉴的关键技术较少。文中通过某地房地一体项目,着重探讨了机载LiDAR 点云、正射影像与倾斜摄影等多源数据融合的关键技术,并进行精度评定,获得理想的效果。
1 融合技术流程
多源数据的融合需要合理处理平台, 如TERRASCAN、CONTEXTCAPTURE 等软件,在融合过程中,充分利用多种数据优势。如图1 所示,通过布设统一坐标系,供后期数据融合使用,点云数据用来生产地表DEM、DSM,正射影像用来制作建筑物顶面,而建筑物与构筑物侧面纹理信息则是由倾斜摄影测量产生。因此,首先将机载LiDAR 点云与正射影像融合为机载LiDAR 点云影像,其次,将机载LiDAR点云影像与倾斜摄影数据融合,使地物侧面纹理得以完善。

图1 多源数据融合技术流程
2 融合处理
融合处理是本文探讨多源数据融合构建精细三维模型的重点,主要涉及三部分:多源数据间的匹配与套合;机载LiDAR 点云与正射影像的融合;影像点云与倾斜数据间的融合。
2.1 多源数据的匹配与套合
目前多源数据的匹配与套合有2 种方案,一是利用统一坐标系,多种数据使用同一套坐标系,地面像控点可统一布设,也可分别布设,只需确保平面与高程坐标系相同即可;另一种方案则是在内业数据处理时,人工手动添加控制点,以固定机载LiDAR 点云位置不变,使正射与倾斜影像空三后的数据通过手动控制点套合在LiDAR 点云上,此时则需要多种数据使用同一套控制点,但并不要求航测之前布设像控点。使用哪种方案可依据具体情况而定,主要区别是前者不需要后期人工内业干涉,但在外业要求做控制测量;后者则不需要控制测量,而是需要内业人工交互添加控制点以完成套合。
2.2 LiDAR 点云与正射融合
机载LiDAR 点云与正射影像的融合,其实质是依据两者共有位置属性,将富有光谱信息的正射影像色彩值赋予对应激光点。在航空摄影测量中,共线方程式[6-9]的表达方式如公式(1)、(2):

由公式可知,实现基于三维点云坐标获取二维影像坐标相对简单,将相应的RGB 信息赋予每一个相应的LiDAR 点云,只需要每个LiDAR 点的三维坐标(X,Y,Z),高精度POS 数据以及相机参数,利用该公式即可获取点云数据相对应的像素在平面坐标系下的(x,y),然后将(x,y)处的(RGB)赋值给相对应的点云数据。如若需要得到高精度三维实景模型,则另需注意两方面:①如果点云密度足够高,该数据即可直接生成高精度的真正射摄影像;②无论是单一影像还是单一的点云地物提取与分类,其难度均较大,如果将影像灰度、纹理信息与点云的高程信息融合,能大幅提高地物的分类提取精度。该环节最后生成影像点云,用以后期与倾斜数据的融合。
2.3 影像点云与倾斜影像融合
通过机载LiDAR 点云与正射影像的融合,可实现对地形与地物顶面结构纹理的提取,而其侧面纹理,则需将该步生成的影像点云与倾斜数据进行融合。通过在Context Capture 平台,可将影像点云与空三处理后的倾斜点云同时纳入到一个绝对坐标系下,在点云基础上构建三角网,同时对三角网进行平滑和简化,最后基于倾斜摄影自动映射侧面纹理,即可生成高精度的三维模型[5-7]。在融合过程中,主要思想是空三环节的处理,若在数据配准套合中采用了统一绝对坐标系与控制测量,则空三设置使用利用精密控制成果处理即可,确保空三通过,无空三分层,套合准确就可进行最后的三维重建;若前期采用人工手动添加控制点以套合两者数据,则在空三环节中应先依据手动控制点进行概略解算,后续仍需多次空三解算,以使概略空三成果与控制点较好套合,确保两者影像点云的数据能够完美的融合。
倾斜摄影测量虽然在一定程度上实现了地物侧面纹理信息得提取,但在建筑物突出的部位,其遮挡部分均有拉花现象,若对该部分有较高的质量要求,可对建筑物遮挡位置进行立面局部补拍,或采用地基激光雷达扫描系统对其数据采集,再将补测数据纳入至融合处理当中即可。
3 实例分析与精度评定
3.1 案例分析
经过反复测试,我们总结了上述多源数据融合方案,并将其应用于某地房地一体项目。从历次融合中发现,不同数据间的配准,使用统一坐标系,采用控制测量的精度要好于后期人工添加控制点的方案,且点位平面中误差较差相对高程中误差小许多。为了更好地表明2 种方案在大比例尺建模、测图项目的可靠性,我们综合运用上述2 种方案进行融合,即前期布设少量控制点,后期内业手动添加控制点的结合方案。
如图2 所示,经过预处理后的机载LiDAR 点云数据,该次测试高度50 m,确保每m2内有足够的点,以及正射影像有足够的分辨率。图中点云数量是混合形式显示,包括其高程与强度信息。图3 给出了机载LiDAR 点云与正射影像融合后的影像点云数据,该部分工作我们借助Terrascan 平台,依据LiDAR 数据离散点在平面坐标系中的(x,y)位置属性,将正射影像中对应坐标的像素灰度值赋予点云,使其富有光谱图像纹理信息。由于该过程不存在一个像素内有多个LiDAR 点的情况,所以这种融合方法不存在重叠与内插问题。后的模型对比效果(上图融合前,下图融合后),显然融合后模型结构与纹理的丰富度均好于融合前。

图2 混合显示的原始点云

图3 机载LiDAR 点云与正射影像点云融合
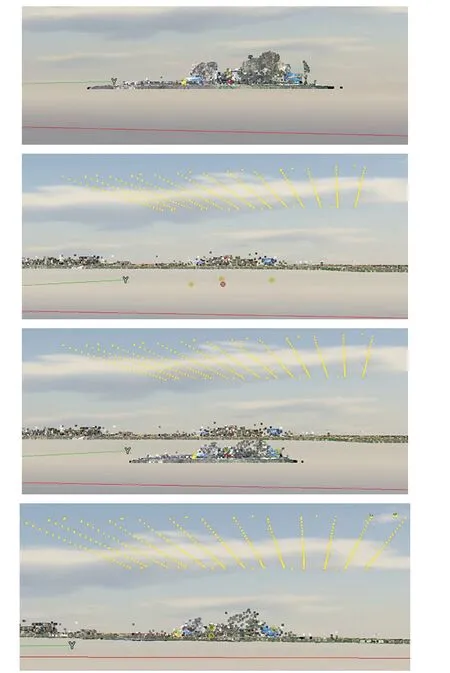
图4 影像点云融合倾斜摄影空三数据
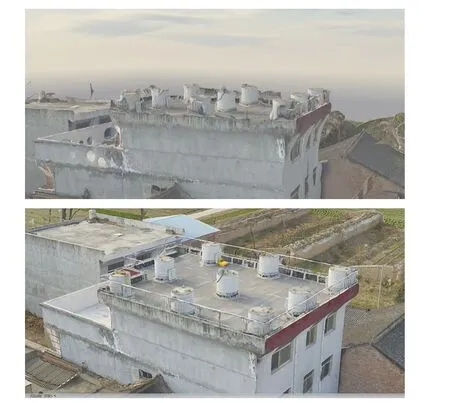
图5 多源数据融合前后效果对比
3.2 精度评定
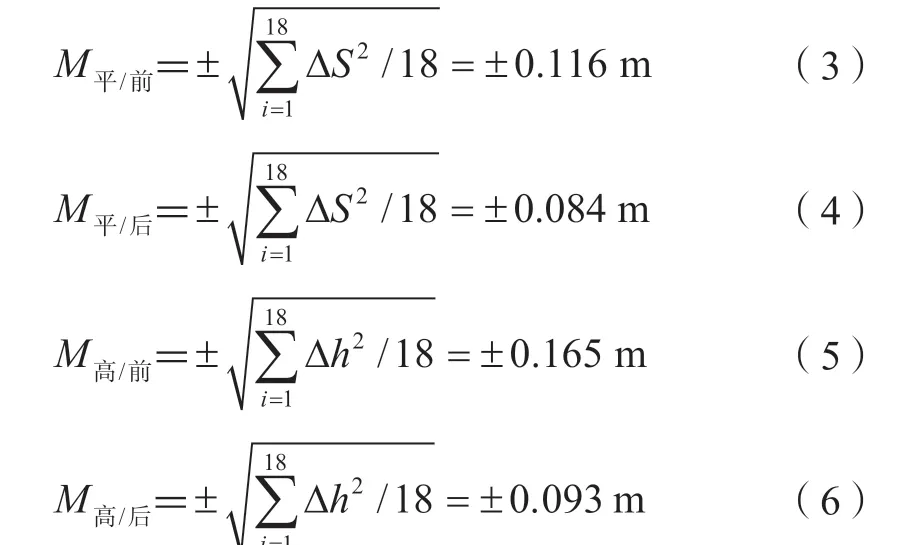
为了对比融合前后的模型精度,我们检测了18 个地物特征点,定量分析了模型整体平面中误差与高程中误差。模型采集点对地表实测坐标差异见表1,按公式(3)~(6)计算,融合前平面中误差0.116 m,高程中误差0.165 m;融合后平面中午差0.084 m,高程中误差0.093 m,结果显示,虽然两者均满足1∶500地籍测量要求,即平面中误差小于图上0.6 mm,高程中误差需小于1/3 等高距(0.333 m),但经多源数据融合后的三维模型精度明显优于融合前,特别是高程精度,较融合前有了显著提升。

表1 地物检查点平面和高程误差统计表/cm
4 结 语
通过对比阐述多种航测手段各自存在的弊端,重点探讨了基于机载LiDAR 点云、正射影像、倾斜摄影等多源数据融合处理生成精细三维模型的关键技术,具体需从多源数据间的配准、机载LiDAR 点云与正射影像的融合、影像点云与倾斜数据的融合等三方面进行方案的详细设计。借助某航测项目,从三维模型纹理结构与模型精度、定性与定量两方面进行了融合前后的对比,结果表明,融合后的精度明显优于融合前。因此,本文所提到的融合技术在实践中获得了较好的效果,为同类项目的设计与实施提供了参考。
猜你喜欢
软件(2020年3期)2020-04-20
摄影之友(影像视觉)(2018年12期)2019-01-28
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
北京航空航天大学学报(2017年4期)2017-11-23
Coco薇(2017年8期)2017-08-03
中国工程咨询(2017年12期)2017-01-31
Coco薇(2015年5期)2016-03-29
安徽地质(2016年4期)2016-02-27
遥感信息(2015年3期)2015-12-13
电测与仪表(2015年22期)2015-04-09
