基于氧化石墨烯的微悬臂梁湿度传感器*
2022-01-18 02:58薛长国周宁鸿王启明李建军
传感器与微系统 2021年12期
薛长国,周宁鸿, 王启明, 冯 贺, 李建军
(安徽理工大学 材料科学与工程学院,安徽 淮南 232001)
0 引 言
湿度传感器作为一类实时监测湿度变化的传感器,在环境监测、化学医药、电子工业以及生物学等领域应用广泛[1~3]。常用的湿度传感器有电阻式[4]、电容式[5]、声表面波型(surface acoustic wave,SAW)[6]以及石英晶体微天平(quartz crystal microbalance,QCM)型[7]等。电阻式和电容式湿度传感器通常直接接触湿敏材料,电极材料长期处于潮湿环境而易氧化,影响其循环使用;声表面波湿度传感器对检测电路的设计要求较高。因此,新型湿度传感器的研发及湿敏材料的应用仍旧具有重要研究价值[8]。相较于上述类型湿度传感器,微悬臂梁湿度传感器具有灵敏度高、待测物体积小、无危害和实时原位检测等优点,在环境监测、医学治疗及食品安全等领域有很好的应用前景[9~11]。氧化石墨烯(graphene oxide,GO)含有不同种类的含氧官能团,具有良好的亲水性以及较大的比表面积,非常适用于湿度检测[12]。
本文利用铜环辅助涂覆法涂覆了以GO作为湿度敏感层的微悬臂梁湿度传感器,利用光杠杆检测原理,根据GO薄膜吸水膨胀失水收缩引起微悬臂梁产生挠度变化来间接测试湿度,并对湿度传感器的灵敏度、响应时间、恢复时间和重复特性进行检测。
1 实验原理
微悬臂梁湿度传感器由GO膜、微悬臂梁和激光组成,其工作原理如图1所示。激光照射在已涂覆GO膜的微悬臂梁自由端表面,光束反射到位置敏感探测器(position sensitive detector,PSD)上,当不同湿度下的水分子吸附到GO膜上,引起微悬臂梁挠度发生变化,反射光束在PSD上的光斑位置发生变化,采用光学杠杆原理对传感器位移偏转进行测量。
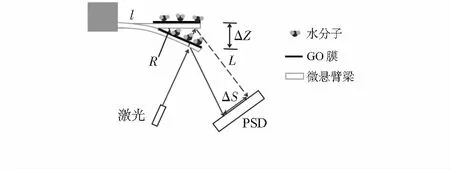
图1 光杠杆法湿敏原理
微悬臂梁位移偏转可通过式(1)计算
ΔZ=(l×ΔS)/4L
(1)
式中 ΔZ为微悬臂梁尖端反应前后的位移偏转,l(500 μm)为微悬臂梁尖端的长度,ΔS为激光束在位置敏感探测器表面前后位移变化,L(3 cm)为经微悬臂梁尖端反射到位置敏感探测器上的光程。
微悬臂梁湿度传感器的灵敏度是指在不同湿度下传感器挠度发生变化,即每个周期内湿度与偏转位移的线性变化。利用光杠杆法,检测经微悬臂梁尖端反射到位置敏感探测器前后光路位移变化来反映微悬臂梁湿度传感器的偏移量,并在不同湿度下测量微悬臂梁湿度传感器的位移偏转。不同湿度下微悬臂梁湿度传感器的灵敏度(S)计算方法为[13]
(2)
式中Z0为微悬臂梁湿度传感器的初始位移偏转,Z为湿度传感器在不同相对湿度下的位移偏转,ΔRH为传感器发生位移偏转前后的相对湿度差值。
2 实 验
2.1 传感器薄膜制备
称取一定量利用改进Hummers法[14]制备的氧化石墨烯,将氧化石墨烯加入装有去离子水的试管中并超声,制备了初始浓度为2 mg/mL的GO分散液。选用以硅为基底,上表面修饰金涂层的双材料矩形阵列硅微悬臂梁(Oc-to500S),其谐振频率为25~35 kHz。
利用铜环辅助涂覆法在微悬臂梁表面制备GO薄膜如图2所示。涂覆法是将铜环和微悬臂梁分别固定在微位移平台上,液滴附着在铜环上,移动微位移平台控制铜环与微悬臂梁距离,在梁上进行涂覆成膜。所用铜环直径为0.15 mm,铜线直径为0.1 mm。首先,将已制备好的GO分散液利用一次性针管滴在铜环上如图2(a)所示;接着移动微位移平台,控制铜环接近微梁,使液滴与微悬臂梁表面接触如图2(b)所示;再移动固定微悬臂梁的微位移平台,使液滴缓慢从微悬臂梁上划过,液滴附着并沉积在微悬臂梁上,再次重复上述操作2次,干燥后得到稳定的GO薄膜,最终得到涂覆的氧化石墨烯微悬臂梁湿度传感器如图2(c)所示。上述所有操作均在高倍显微镜下完成。由于液滴的自然挥发,使得制备的薄膜表面有细微起伏,薄膜表面不完全光滑,但增加了薄膜的比表面积,提高了薄膜的湿敏性能。
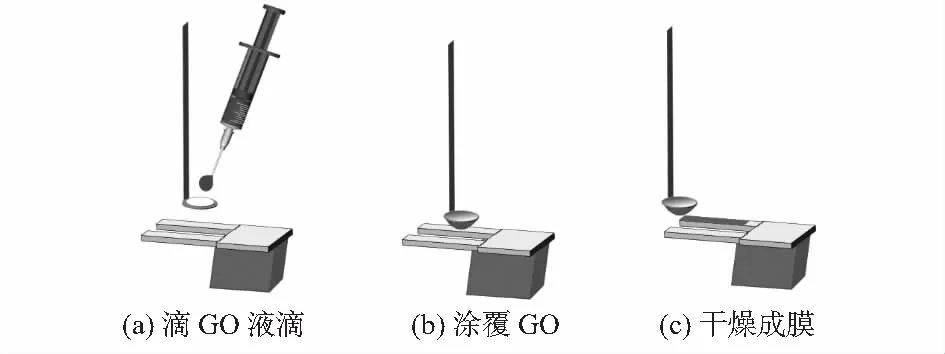
图2 湿度传感器GO薄膜制备流程
2.2 实验装置
如图3所示,湿度传感器实验装置由三部分组成:湿度产生和调节、传感器测试和记录、湿度和温度监测。通过改变干湿氮气的流量比来控制湿度产生和调节,保持腔室中的湿度在18 %~77 %RH范围内。采用光学杠杆检测原理,利用光电位置敏感探测器(PSD)对微悬臂梁上湿敏材料发生反应时引起梁的微小挠度变化进行测量,将数据采集卡采集到的测试数据传输到计算机数据处理软件进行处理完成对传感器的测试和记录。利用温湿记录仪(RS-WS-WIFI-Y2)对腔室中相对湿度和温度进行实时监测。
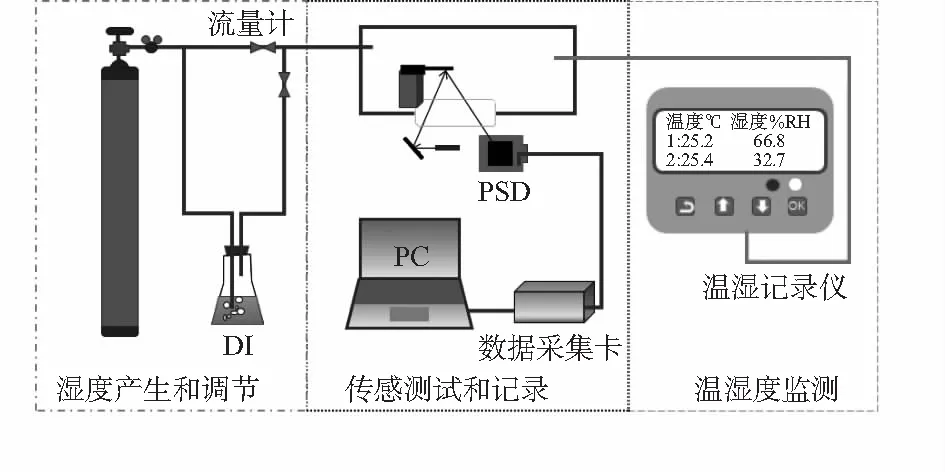
图3 湿度传感器实验装置示意
3 结果与分析
3.1 传感器湿度灵敏度响应
湿敏薄膜性能的灵敏度是反映湿度传感器实用性的一个重要指标。图4给出了湿度从18 %RH变化到77 %RH时,湿度传感器在不同湿度下的位移偏转曲线。如图所示,腔室中的湿度越大,传感器的位移偏转逐渐增大。在18 %~77 %RH湿度范围内,根据式(2)计算得到的传感器灵敏度约为82.93 nm/%RH。
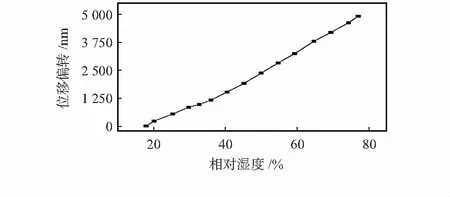
图4 不同湿度下传感器位移偏转的曲线
如图4所示,低湿度下传感器位移偏转在单位湿度下稳定性较差,湿度逐渐增加,传感器位移偏转呈线性增长且单位湿度增长幅度较为稳定。这是由于GO是一种多层纳米材料,中间层通过氢键连接,含氧官能团及水分子被截留在其中,在低湿度水平,GO薄膜吸收的水分子较少,含氧官能团之间主要形成氢键,使GO薄膜结构比较紧密;随着腔室中湿度逐渐增加,水分子进一步渗透到GO薄膜各层,导致GO薄膜的层间距离逐渐增大,进一步促进了水分子在薄膜上的吸附,导致GO薄膜在微梁上膨胀,增大梁的偏转位移。
3.2 传感器的湿滞特性
当测试环境湿度变化跨度大时,低滞后对湿度传感器性能非常重要。图5所示为传感器的湿滞特性曲线。如图5所示,腔室中的相对湿度逐渐增加至77 %RH后,降低腔室湿度恢复到22 %RH,通过检测传感器的位移偏转量,得到微悬臂梁湿度传感器的湿滞特性。测试结果表明,传感器在22 %~77 %RH湿度范围内的湿滞误差低于5 %RH,其湿滞性误差较理想。传感器的吸附响应曲线和解吸响应曲线在不重合之处产生湿滞,湿滞主要出现在高湿度环境。由于在高湿度环境,GO含氧官能团的亲水性使薄膜吸附大量水分子,导致解吸过程滞后。
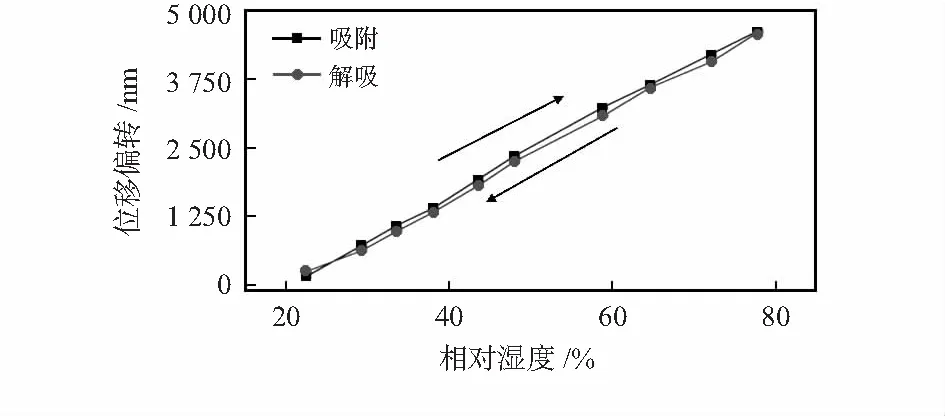
图5 传感器的湿滞特性曲线
3.3 传感器重复性
图6为传感器在湿度为20 %~77 %RH范围变化时,进行的4次循环测试,进一步研究了GO微悬臂梁湿度传感器的重复性。结果如图6所示,对于连续4次重复性实验,传感器偏转位移的趋势基本相同,这表明GO微悬臂梁湿度传感器具有良好的重复性。传感器在20 %RH和77 %RH两个湿度点附近发生波动,是由于背景光源影响,导致PSD接收信号产生波动。
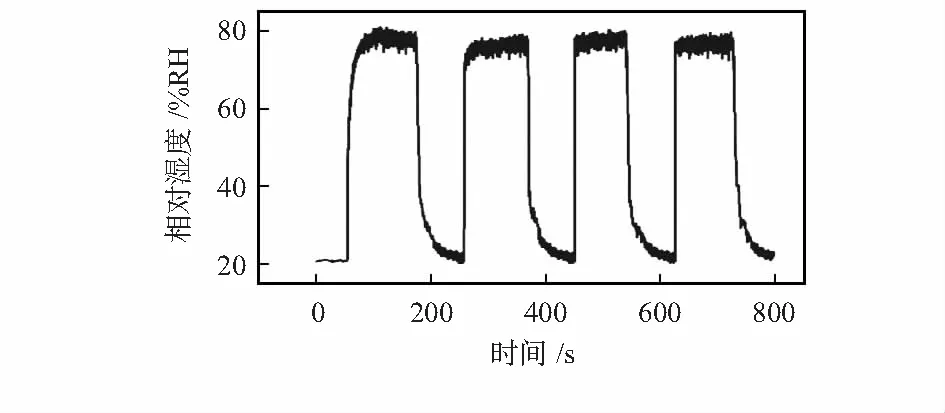
图6 传感器重复特性响应曲线
3.4 传感器响应时间和恢复时间
传感器在不同湿度环境下的输出速度取决于响应时间和恢复时间快慢。图7(a)为传感器在其中一个湿度重复阶段的响应时间和恢复时间的过程,如图7(b)所示,当湿度变化从20 %RH上升至77 %RH时,响应时间为5 s;图7(c)为湿度下降至20 %RH时,传感器恢复时间为10 s。表1为本文的实验结果与部分已报道的不同湿敏材料的湿度传感器的性能比较,相比于其他湿度传感器,本传感器响应时间和恢复时间缩短。
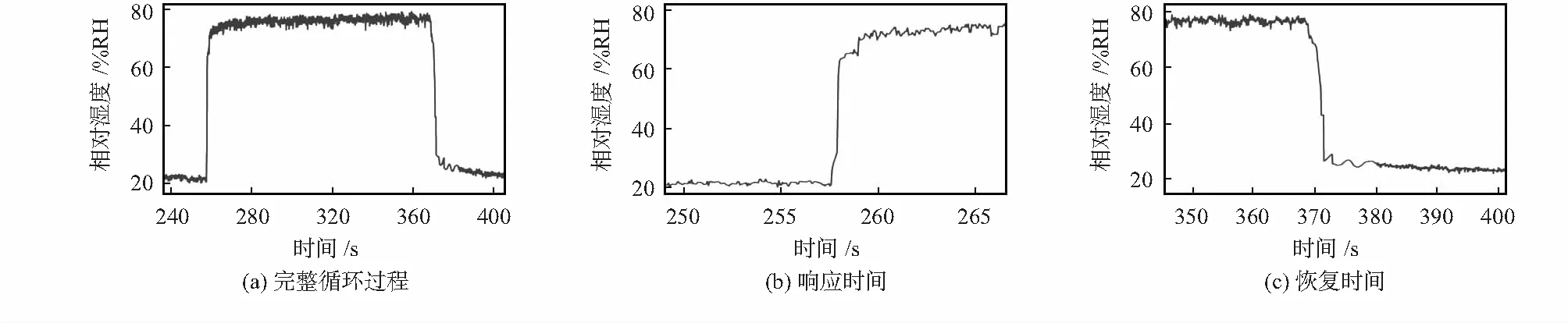
图7 相对湿度为20 %~77 %RH时传感器的完整循环过程、响应时间、恢复时间
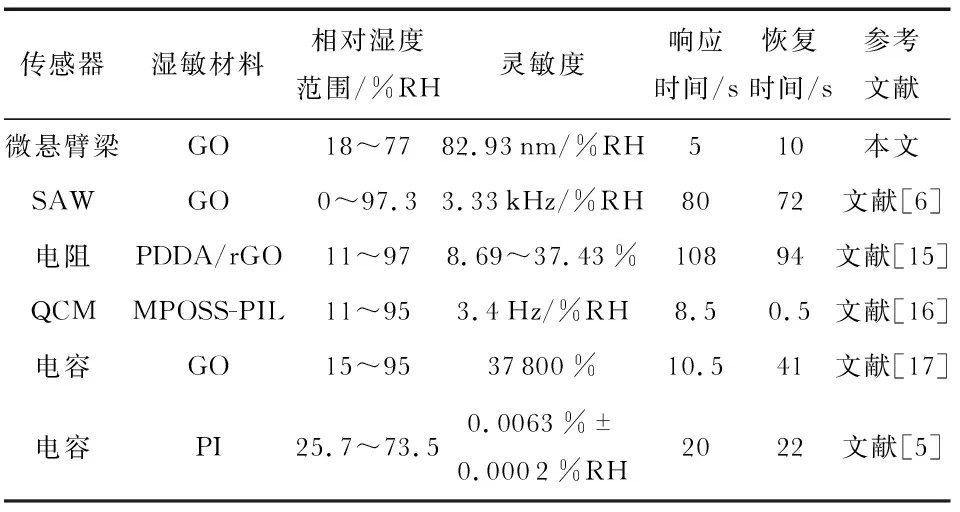
表1 不同湿敏材料的湿度传感器性能比较
4 结 论
本文提出的以氧化石墨烯为湿度敏感层的微悬臂梁湿度传感器,研究了该湿度传感器在不同湿度下各项输出性能。实验结果表明:传感器在湿度范围为18 %~77 %RH,其位移偏转约为4 700 nm,湿度灵敏度为82.93 nm/ %RH;当相对湿度从22 %RH增加至77 %RH后又降至22 %RH时,传感器的湿滞特性低于5 %;实验湿度在20 %~77 %RH时,传感器响应时间和恢复时间分别为5 s和10 s,响应特性和恢复特性良好;传感器的湿敏特性和迟滞特性满足实际应用需求,具有一定的应用前景。
猜你喜欢
科教新报(2021年11期)2021-05-12
中国特种设备安全(2021年9期)2021-03-02
天津科技大学学报(2021年1期)2021-02-25
测控技术(2018年9期)2018-11-25
上海公路(2018年1期)2018-06-26
雷达学报(2018年1期)2018-04-04
意林原创版(2017年11期)2017-12-01
化工进展(2015年3期)2015-11-11
时代英语·高二(2015年2期)2015-05-18
电子世界(2015年24期)2015-01-16