
一种循序渐进的无人机航测实践教学模式
2022-01-24 06:32李笑瑜艾慧丽戚文杰杨文杰
北京测绘 2021年11期
蔡 鹏 岳 雄 李笑瑜 艾慧丽 戚文杰 杨文杰
(1. 江苏航空职业技术学院 航空工程学院, 江苏 镇江 212134; 2. 江苏航空职业技术学院 镇江市无人机应用创新重点实验, 江苏 镇江 212134; 3. 武汉兆格信息技术有限公司, 湖北 武汉 430223)
0 引言
随着摄影测量技术与无人机应用技术的迅猛发展,摄影测量已逐渐为广大生产单位在实际生产中使用。无人机航测实践教学是培养学生能力培养的重要环节,无人机航测实践教学包括外业和内业实践教学两部分。
文献[1]提出无人机航测多元化教学模式,能提高学生的无人机航测实践创新能力。文献[2]提出基于学习产出的教育模式(Outcomes-Based Education, OBE)理念的摄影测量学实践教学方法,建立了以实践教学内容优化、平台建设和多元化评价方法为核心的摄影测量实践教学体系,锻炼了学生摄影测量实践能力。文献[3]探索基于桌面云实验室的摄影测量实验的全新开放教学模式,培养了学生自主实践操作能力。文献[4]提出特色摄影测量实验模式的创建方案,能帮助学生理解和掌握摄影测量理论和技能,并增强学生的实际动手能力。文献[5]在摄影测量实践教学过程中,通过“分组摄影、分片成图、连成一体”的方式,实现了校区无人机航测成图的实践教学工作。文献[6]对无人机摄影测量课程的实践教学进行了探讨,为具备无人机硬件设备的摄影测量学课程实践教学提供重要参考。文献[7]探讨无人机航测内业与外业的教学实验,对相关高校和专业开设类似实验具有一定的借鉴意义。文献[8]对创新创业教育与专业教育相融合的测绘工程专业人才培养模式进行了探讨。以上无人机航测的实践教学模式中,缺乏对国内外航测内业软件不同特点进行比较的实践教学,缺乏切实可行的基于手机近景摄影的三维建模的实践教学。
本文提出一种循序渐进的无人机航测实践教学模式,分为基本能力实训和强化能力实训。基本能力的外业实训通过无人机地面站设置2D航线以获取垂直影像,内业实训通过DPGrid和Pix4Dmapper软件生产数字地图;强化能力的外业实训通过无人机地面站设置3D航线以获取倾斜影像,内业实训通过Agisoft Metashape和ContextCapture软件生产3D模型。分模块按步骤执行且人机交互多的DPGrid和Agisoft Metashape软件更适合无人机航测实践教学。本文通过切实可行的手机近景摄影进行三维建模的实践教学,以增强无人机航测实践教学效果。
1 无人机航测的循序渐进实践模式
本文通过循序渐进的实践教学模式,以培养和增强学生的无人机航测实践能力。
无人机航测外业通过无人机地面站设置2D航线以获取垂直影像,内业通过DPGrid和Pix4Dmapper摄影测量软件进行垂直影像处理,利用DPGrid软件生产数字高程模型(Digital Elevation Model,DEM)、数字正射影像(Digital Orthophoto Map,DOM)、数字线划地图(Digital Line Graphic,DLG),利用Pix4Dmapper软件生产数字地表模型(Digital Surface Model,DSM)、DOM,以培养学生无人机航测实践的基本能力,分模块按步骤执行且人机交互多的DPGrid软件更适合基本能力的实践教学。
无人机航测外业通过无人机地面站设置3D航线以获取倾斜影像,内业通过Agisoft Metashape和ContextCapture摄影测量软件进行倾斜影像处理,生产3D模型,以增强学生的无人机航测实践能力,ContextCapture软件的三维重建效果好,分模块按步骤执行过程详细的Agisoft Metashape软件更适合强化能力的实践教学。
2 无人机航测基本能力实训
无人机航测外业通过大疆精灵4 RTK无人机飞2D航线以获取垂直影像,内业通过DPGrid和Pix4Dmapper摄影测量软件对垂直影像进行处理,生产DEM、DOM、DLG、DSM,以培养学生无人机航测实践的基本能力。
DPGrid软件是数字摄影测量网格处理系统,为中国工程院院士张祖勋提出并指导研制出的新一代数字摄影测量系统[9-12]。DPGrid主要包括原始资料分析与整理、新建工程、匹配连接点、自由网平差及交互编辑、添加控制点、控制点平差及交互编辑、模型生成、密集匹配、点云处理、DEM生产、DOM生产、DLG生产等部分。
如图1(a)通过大疆精灵4 RTK无人机地面站设置江苏航院局部范围的2D航线,即无人机在一定高度的二维平面飞行且摄像头垂直向下,并设置重叠率、飞行速度和高度、返航点等飞行参数。上述步骤教师先在实训室课堂上给学生讲清楚,在室外的实际场景中演示给学生看,然后,让学生亲自动手进行实际操作。大疆精灵4 RTK无人机自动起飞、自动按设置航线飞行并摄影,完成任务后自动返回。

图1 DPGrid软件的DEM生产和DOM拼接
图1中,大疆精灵4 RTK无人机自动拍摄142幅影像,DPGrid软件通过匹配连接点、自由网平差及交互编辑、添加控制点、控制点平差及交互编辑、模型生成、密集匹配等主要步骤后生成DEM如图1(b)所示,上述142幅影像在DEM上经过像片纠正生成142个单片DOM,图1(c)是其中的20个单片DOM,然后拼接生成1个完整的正射影像图如图1(d)所示。老师对上述具体步骤边讲解边演示,然后,学生完成相应的步骤。考虑到在普通台式机上142幅影像密集匹配生成DEM时间长达几个小时以上,可以在实训课上直接给出142幅影像已有DEM成果,让学生在课上完成142个单片DOM生产和拼接实训如图1(c)~(d)所示。
Pix4Dmapper软件是由瑞士Pix4D公司研发,是一款集全自动、快速、专业精度为一体的无人机数据和航空影像数据处理软件[13-14]。Pix4Dmapper处理过程完全自动化,无需人工干预,可以将上千张影像快速制作成专业的、精确的二维地图和三维模型。Pix4Dmapper主要包括初始资料准备、工程建立与数据导入、快速处理检查(可选)、控制点添加、全自动处理等部分,全自动处理部分包括初始化设置、点云加密、DSM和DOM生产。
通过大疆精灵4 RTK无人机在江苏航院局部范围飞2D航线,如图2(a)所示,自动拍摄146幅影像,并利用Pix4Dmapper软件生成密集点云,如图2(b)所示,DSM如图2(c)所示,DOM如图2(d)所示。其自动化程度高、人机交互少、生成成果质量较好。在上述无人机航测外业和内业实训中,教师先讲解和演示具体步骤,然后,学生再模仿完成相应的步骤。由于普通台式机使用Pix4Dmapper软件生成146幅影像的DSM及DOM成果时间长达几个小时,因此,选取其中23幅影像,保证学生能在有限的课堂时间内完成实训任务。
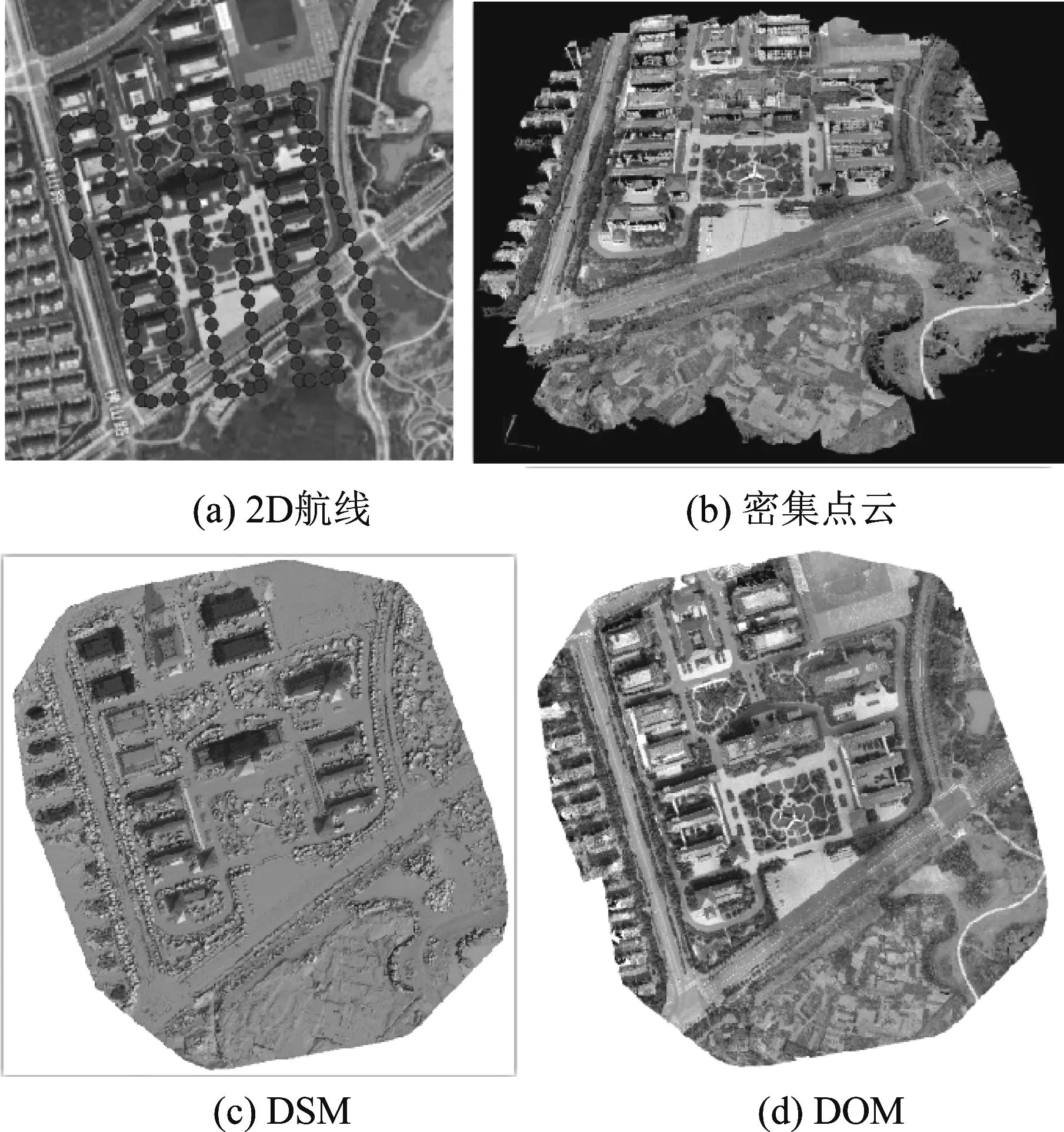
图2 Pix4Dmapper软件的点云、DSM和DOM生产
Pix4Dmapper软件自动化程度高,人机交互少,学生不能体验单片DOM 生产和多个单片DOM拼接这个完整的过程;而DPGrid软件可以让学生体验上述过程,使学生不仅知其然(DOM拼接的最终结果),而且知其所以然(DOM拼接的整个过程),能有效培养学生无人机航测的扎实基本功。
DPGrid软件功能齐全,通过其立体影像测图模块可实现DLG生产,这是Pix4Dmapper等其他摄影测量软件所不具备的。如图3所示,DPGrid软件利用立体影像测图功能通过对道路、房屋等地物的三维坐标采集,获取局部的一个立体对像[图3(a)]的DLG成果,如图3(b)所示。实训课上,教师讲解并演示如何利用一个立体像对获取相应的局部区域的DLG成果,然后,学生处理完成全部立体像对的DLG采集及相邻像对之间的接边,最终生产出完整的DLG,这样可以培养学生利用摄影测量软件生产DLG的基本能力。
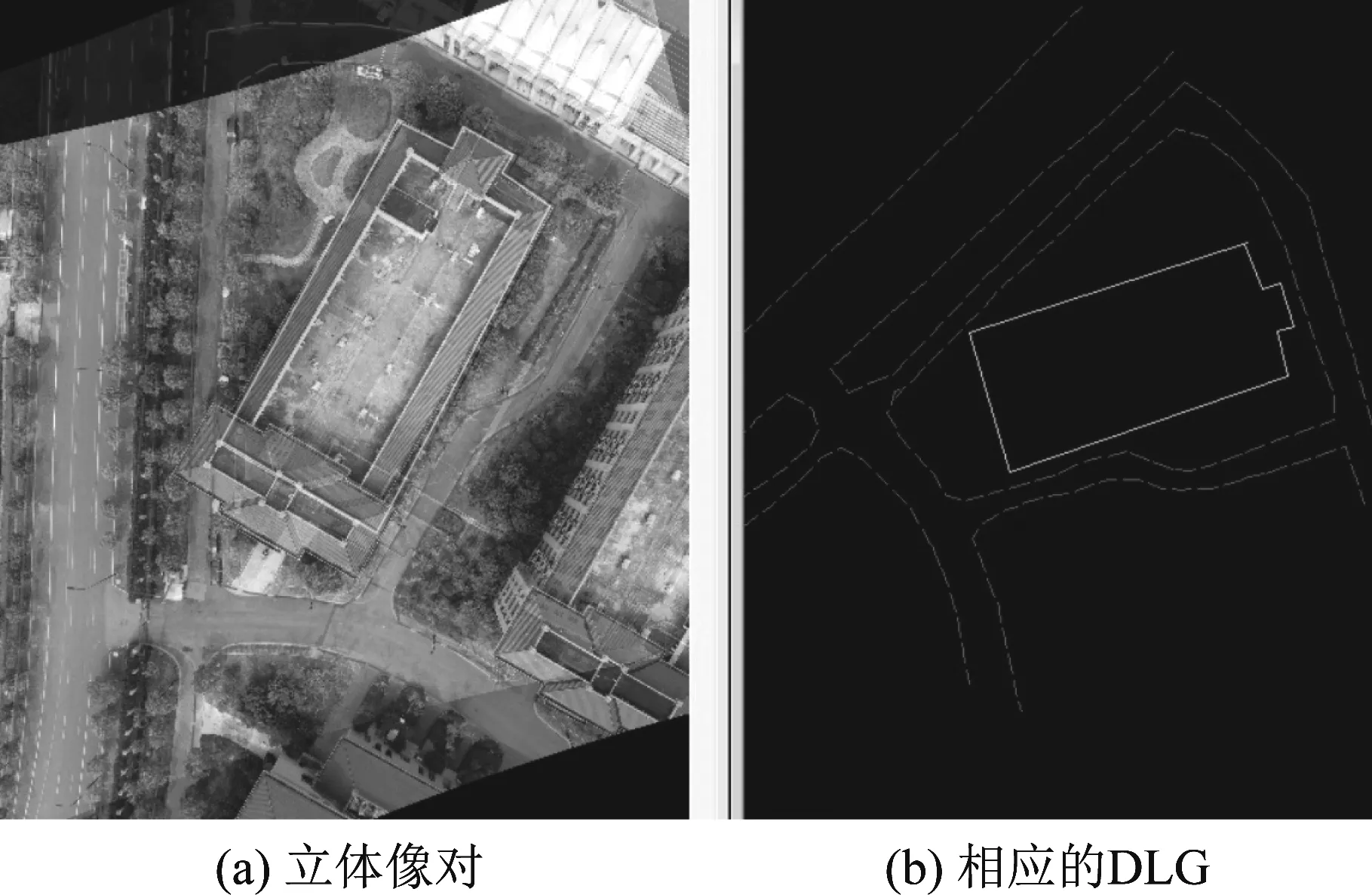
图3 DPGrid软件的DLG生产
3 无人机航测强化能力实训
无人机航测外业通过大疆精灵4 RTK无人机飞3D航线以获取倾斜影像,内业通过Agisoft Metashape和ContextCapture摄影测量软件对倾斜影像进行处理,生产3D模型,以增强学生的无人机航测实践能力。
Agisoft Metashape软件是Agisoft PhotoScan软件的后续版本,Agisoft Metashape软件是基于最新的多视图3D重建技术,图像对齐和3D模型重建都是自动的,其工作流程完全自动化[15]。Context Capture软件是一个三维建模软件,是在其前身Smart3DCapture技术的基础上发展起来的一种新的软件解决方案,从拍摄的照片生产出高分辨率的3D模型,无需任何人工干预[13-16]。
本文通过让学生用手机对江苏航院中某个物体进行围绕拍摄,然后,利用Agisoft Metashape软件和ContextCapture软件进行三维重建,生产相应3D模型,并进行效果比较,可以让学生对基于无人机航测的三维重建有一个直观认识。
如图4所示,教师让学生通过手机围绕江苏航院校园中路牙角落的石头拍38幅影像,也可以让学生选择其他物体进行手机摄影,这样可以充分调动学生主观能动性。然后,教师分别通过Agisoft Metashape软件和ContextCapture软件对上述石头场景的影像进行三维重建,对软件步骤边讲解边演示,并安排足够时间给学生完成相应步骤。

图4 手机摄影三维重建效果
上述两种软件操作过程不一样, Agisoft Metashape软件可以分为点云生成、网格生成和纹理生成等主要步骤,每步都产生相应的中间结果,先后生成石头场景的稀疏点云、加密点云、网格模型和带纹理的网格模型,如图4(a)所示。这些中间结果的生成参数都可以分别设置,生产步骤较为详细,这样可以加深学生对三维重建的基本步骤的理解和操作(图5);而ContextCapture软件自动化程度高,且使用上具有一定的专业技巧性,软件直接生成最终的带纹理的网格模型如图4(b)所示,不能加深学生对三维重建的基本步骤的理解和操作。

图5 Agisoft Metashape软件的部分操作流程
关于江苏航院某局部场景,Agisoft Metashape软件和ContextCapture软件对石头部分的三维重建质量整体上都挺好,但对与石头的几何特征不同的路牙部分,ContextCapture软件重建质量比Agisoft Metashape软件好,这样可以让学生对这两种软件三维重建效果有个直观比较,从而增强对这两种三维重建软件的理解和操作。
在江苏航院某局部场景中,如图6(a)所示,通过大疆精灵4 RTK无人机地面站设置3D航线(即井字路线),横向和纵向航线位置的摄像头分别倾斜一定角度,总共拍摄227幅影像。图6(a)是通过ContextCapture软件重建江苏航院局部区域的3D模型,图6(b)和(c)分别是Agisoft Metashape软件和ContextCapture软件进行三维重建的局部效果图,可以看出ContextCapture软件比Agisoft Metashape软件三维重建效果好。通过这两种软件的建模效果比较,能增强学生对无人机航测影像的三维模型重建过程的理解和操作。
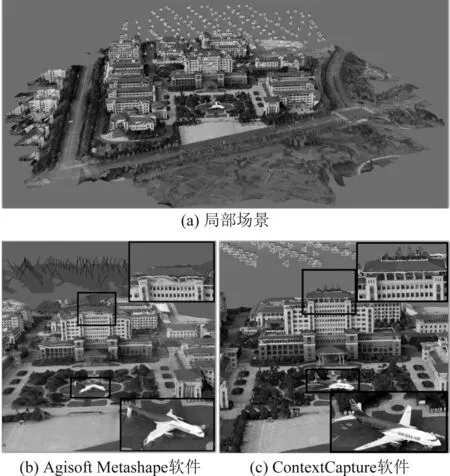
图6 无人机摄影三维重建效果
4 结束语
本文提出一种循序渐进的无人机航测实践教学模式,分为基本能力实训和强化能力实训。基本能力的外业实训通过设置2D航线以获取垂直影像,内业实训利用DPGrid和Pix4Dmapper软件生产DEM、DOM、DLG、DSM,分模块按步骤执行且人机交互多的DPGrid软件更适合基本能力的实践教学;强化能力的外业实训通过设置3D航线以获取倾斜影像,内业实训通过Agisoft Metashape和ContextCapture软件生产3D模型,ContextCapture软件的三维重建效果好,分模块按步骤执行且入门更容易的Agisoft Metashape软件更适合强化能力的实践教学。
猜你喜欢
建材发展导向(2022年12期)2022-08-19
北京航空航天大学学报(2021年6期)2021-07-20
运输经理世界(2021年33期)2021-06-27
西部交通科技(2021年9期)2021-01-11
软件(2020年3期)2020-04-20
办公室业务(2019年22期)2019-11-24
卷宗(2017年23期)2017-09-02
科技资讯(2016年25期)2016-12-27
电脑知识与技术(2016年20期)2016-08-19
求知导刊(2016年5期)2016-03-19
