
一种滚动轴承振动信号自适应数据级融合方法
2022-02-02 10:13郭俊锋樊怡明
机械设计与制造工程 2022年12期
郭俊锋,樊怡明
(兰州理工大学机电工程学院,甘肃 兰州 730050)
随着传感器技术的发展和工业设备复杂度的不断提高,设备的状态监测需要通过大量的传感器来实现。滚动轴承作为旋转类机械设备中应用最为广泛的一类关键零件,结构脆弱、极易受损,是旋转机械中最容易受损的零部件[1-3],因此轴承的健康状况直接影响整台设备的综合性能,实际工程中,会在不同位置放置传感器来监测轴承运行的图像、声音、温度、振动等信号,对不同信息综合利用,即传感器融合技术。
滚动轴承的故障诊断主要分为两个部分:振动信号的处理和故障诊断分类。目前的大部分研究仍然集中于对单一方向的振动信号进行处理,再进行建模。已有部分学者对多源传感器数据进行融合,以达到完整表征轴承退化信息,但主要还是侧重于多源传感器的特征级和决策级融合[4]。文献[5]首先使用并行神经网络对振动信号进行特征级融合,然后采用D-S证据理论对特征级的诊断结果进行决策级融合,在汽轮机转子实验上取得了比较好的结果;文献[6]定义了一种特征级融合规则,将卷积神经网络作为特征提取器,对得到的特征进行融合,最后采用SVM进行故障分类;文献[7]对特征进行优化选取后,利用改进D-S证据理论进行了决策级融合,最后提出轴承设备健康状态评价系统,验证了改进算法的有效性;文献[8]首先建立了基于LEACH协议的3层融合模型,然后采用主成分分析对数据进行降维,最后采用径向基神经网络实现决策级融合,故障识别率达到85%以上。
综上所述,特征级和决策级的传感器数据融合均需要人为先验知识的代入,导致在选择特征和融合判断时丢失原始信号包含的完备轴承故障信息,数据级融合则有效避免了人为因素的干预。本文将图像加权平均融合算法[9]迁移到振动信号的多源传感器数据级融合中,提出一种自适应的数据级融合方法。
1 信号预处理
1.1 指数加权移动平均
轴承振动信号作为一个前后相关联的非平稳时间序列,会给后续的分析带来困难,而指数加权移动平均法(exponentially weighted moving average,EWMA)可以看成一个低通滤波器,剔除短期波动、保留长期发展趋势,提供了振动信号的平滑形式[10]。根据实际的观测值,通过式(1)来完成平滑处理:
EWMA(t)=λY(t)+(1-λ)EWMA(t-1)
(1)
式中:EWMA(t)为t时刻的估计值,表示t时刻平滑后的数据;Y(t)为t时刻的观测值;λ为衰减权重,0<λ<1。采用1024长度数据为窗口进行指数加权移动平均处理后,某一时刻信号峭度值变化趋于平稳,噪声减小,长期范围内相关性增强,有效避免了数据抖动,使振动信号更加平稳、平滑,如图1所示。

图1 指数加权移动平均前后峭度变化趋势
1.2 小波包分解与重构
信号处理中小波包分解(wavelet packet decomposition)是为了解决小波分析仅对低频信号进行分解的缺点而提出的一种更加精确的信号分解方法。小波包分解不仅对低频信号进行分解,同时也对高频部分做分解,大大优于小波分析的信号分析能力[11]。以3层小波包分解为例,其分解过程逻辑框图如图2所示。

图2 3层小波包分解逻辑框图
记W0=φ(ω),W1(ω)=ψ(ω),其中φ(ω)和ψ(ω)分别为尺度函数和小波函数,g(p),h(p)分别为高通滤波器和低通滤波器,在ω时刻对频带μn进行分解,则有:
(2)
(3)
式中:Z为整数集;函数系{Wn(ω)}称为尺度函数W0=φ(ω)的小波包;ω为信号的时间变量;n,p均为整数。
对原始信号进行小波包分解后,得到不同频率区间的子频带,包含有若干高频信号、低频信号和噪声信号。由于各个子频带与原始信号之间存在一定的关联性,考虑选择关联性较强的子频带进行重构,可以得到较高信噪比的去噪信号[12]。设振动信号为一个时间序列Yω,ω=1,2,3,…,则在第ω时刻与(ω+n)时刻之间的相关性称为n阶自相关,相关系数用acfn来定义:
(4)

一般情况下,噪声信号与原振动信号的相关性趋于零。小波包分解是正交无重叠的,因此可以构建各子频带与原信号的相关系数,作为频带选择的标准,即:
(5)
式中:k(ij,0)为第i层分解第j个频带与原信号的相关系数,用来反映与原信号的相关程度;max([acfij])和max([acf0])分别表示子频带信号和原信号自相关系数矩阵中的最大值。公式(5)可作为频带选择的标准,按照k(ij,0)值从大到小排序,剔除相关性较弱分量,重构信号用于特征提取及故障识别。
2 融合权重优化
加权数据融合是将传感器提供的数据按照一定的权重进行融合,其最重要的问题就是如何进行分配以达到最优结果。设存在传感器观测值qi,i=1,2,3,…,n,每个传感器权重为αqi,则有:
(6)
为了解决不同数据间自适应的权重qi分配,本文引入粒子群优化算法[13]并对适应度函数进行优化。该算法由于原理简单、收敛速度快,已广泛用于参数优化、数据处理等众多领域。其粒子基本的速度V和位置X的更新公式为:
Vir(l+1)=ξVir(l)+C1rand(a,b)(Pbir-Xir(l))+C2rand(a,b)(Pgr-Xir(l))
(7)
Xir(l+1)=Xir(l)+Vir(l+1)
(8)
式中:i=1,2,…,n,表示粒子种群个数;l=1,2,…,n,表示粒子群迭代次数;ξ为惯性因子,为一个非负数,决定了算法全局寻优能力强弱;C1和C2为学习因子,实验表明,一般取C1=C2∈[0,4];rand(a,b)为a和b之间的随机数,其中a和b为粒子初始化取值范围端值;r为维度;Pbir表示第i个粒子个体极值的第r维;Pgr表示全局最优解的第r维。

(9)
式中:p≥1。当p=2时,即为欧氏距离:
(10)
KNN中的k值是该算法中一个非常重要的参数,是一个自定义常量,k值选取得太小,模型太复杂;k值选取得太大,导致分类模糊。通常算法中的k值为一个经验值,在后续实验中将采用网格搜索法来进行k值的选择。
3 信号自适应数据级融合方法
本文结合粒子群优化算法和KNN算法的优势,对振动信号进行自适应数据级加权融合,充分利用传感器采集数据,提取到信号有效特征.其算法主要流程如图3所示。

图3 粒子群优化算法主要流程
定义符号qi为第i个传感器采集振动信号的预处理信号,Q为采用数据级融合后振动信号,则该算法的具体步骤如下:
1)对n个传感器采集到的原始振动信号进行预处理,得到(q1,q2,q3,…,qi,qi+1,…,qn-1,qn)。
2)初始化融合权重(aq1,aq2,aq3,…,aqn),αq1+αq2+αq3+…+αqn=1,进行初步融合:
Q=αq1q1+αq2q2+…+αqnqn
(11)
3)计算初步融合后振动信号的14个时域特征,以故障类型进行标记,组成900×14特征矩阵,记为:
即k= 900,j= 14。
4)以KNN算法的分类结果作为粒子群优化算法的适应度函数,故障分类结果作为全局最优标准,初始化粒子群优化算法进行全局寻优,按照式(7)、(8)对融合权重和寻优速度进行更新。
5)重复步骤2),当寻优迭代次数到达设定阈值时,满足算法终止条件,循环迭代结束,得到全局最优权重 ,则最终融合信号为:
(12)
在步骤4)中,经过实验验证,选择20次迭代,每次20个粒子进行寻优,能够在寻找到全局最优权重的前提下保证算法较好的性能。
4 仿真实验
4.1 实验平台及数据
仿真实验数据采用XJTU-SY滚动轴承加速寿命试验数据集,该数据集为西安交通大学机械工程学院雷亚国教授联合浙江长兴昇阳科技有限公司以滚动轴承为实验对象,得到的滚动轴承加速寿命实验数据集[16]。数据集包括3种工况下15个LDK UER203滚动轴承的全寿命周期振动信号,将PCB 352C33单向加速度传感器分别固定在测试轴承的水平和垂直方向上,采样频率为25.6 kHz,采样间隔为1 min,每次采样时长为1.28 s,采集到的信号按采集顺序以csv格式储存在公开文件夹中。传感器放置如图4所示。
图4 实验台及传感器放置
选择同一工况下采集的Bearing3_2、Bearing3_3、Bearing3_5作为实验轴承数据,就水平方向振动信号以每1.28 s数据为一组做峭度分析,结合时域图像估计每组信号故障发生点,并绘制3种故障类型下估计故障发生点的时域波形,如图5所示。将估计故障发生点和3组轴承信号的详细信息绘制成表1。
图5 3种故障类型波形图

表1 3组轴承工况及估计障失效发生点
本实验使用的主要平台为Windows10/PyCharm Community Edition 2020.1.1 X64,python版本为python 3.7。计算机配置为: AMD FX(tm)-8300 Eight-Core Processor CPU@3.30 GHz,16.00 GB RAM,64位操作系统。设计了基于python 3.7开发环境的PSO_KNN数据级融合模型实验。
4.2 实验过程
首先,以1024长度数据为窗口,对3组信号的水平和竖直方向振动信号进行指数加权平均处理。同样以1024长度为窗口对振动信号分段进行3层小波包分解[17],共得到14个子频带信号,代入式(4)、式(5)计算相关系数,将相关系数由大到小进行排序,取排名靠前8组频带信号进行重构,得到小波包降噪后重构信号。
以轴承Bearing3_5某一组数据为例,3层小波包分解后取前6组子频带相关系数,见表2,剔除无关分量后重构信号对照如图6所示,经过处理后,轴承的全寿命周期振动信号在时域上不仅保证了较大的变化趋势,而且在健康状态时去除了一定的噪声,信号更加平稳,使得故障发生点在时域上体现比较明显。
图6 Bearing3_5降噪波形对照图

表2 前6组相关系数
利用PSO_KNN模型对3组振动信号进行最佳权重寻优。粒子群优化算法的参数选择:粒子个数为20;粒子群速度寻优范围取值为(-0.1,0.1),粒子群位置的取值范围为(0,1);根据经验取C1=C2=1.499 45;最大迭代次数为20;ξ(t)随迭代次数的增加从0.9线性递减至0.4:
(13)
式中:ξmax=0.9,ξmin=0.4,分别为惯性权重的最大值和最小值;t为迭代次数,tmax为最大迭代次数。
挑选融合后振动信号的14个时域特征用于故障分类,分别为峰值、方差、峰峰值、均方根幅值、标准差、绝对均值、峭度、偏斜度、波形指标、脉冲指标、裕度指标、峰值指标、峭度指标、偏斜度指标。每组轴承的全寿命周期信号中随机按1024长度数据为窗口,计算300组特征,3种故障类型下共计900组特征,存为csv格式文件。KNN训练集和测试集以8∶2比例分割,使用Z-score标准化方法处理特征。其中,KNN重要参数k在1~20内使用网格搜索法,当k=1时模型得分最高。
4.3 性能验证与分析
经过20次迭代后,得到全局最佳融合权重和KNN故障分类模型,选择支持向量机(support vector machine,SVM)作为对照组,并将原始水平与垂直方向振动信号的KNN模型得分进行比较(表3),可知融合后数据在KNN模型上的故障识别率均高于采用单一方向振动信号的故障识别率,同时也高于支持向量机的分类结果。为了直观地判断采用该方案训练得到的分类器性能,采用混淆矩阵来可视化测试集上分类器分类能力(图7),坐标轴标签分别代表3种故障类型,并使用主成分分析降维[18]和t-SNE[19]可视化融合前水平和竖直方向信号特征,以及该方案融合后数据特征的聚集情况(图8),其中标签1代表Bearing3_2复合故障,标签2代表Bearing3_3内圈故障,标签3代表Bearing3_5外圈故障类型。可以看出,相较于单一传感器信号特征,融合后数据特征具有更好的可分类能力。由于复合故障信号1包含故障信息复杂,与其他单一故障信号存在干涉,所以其KNN分类能力改善相对较小,而单一故障类型经过融合后能够明显与其他故障类型区分,且重叠部分减少。

表3 对照实验结果

图7 分类器混淆矩阵
在融合层次方面,选择经典Dempster-Shafer[20]组合理论进行特征级融合,再利用KNN分类器进行分类;对各单一方向传感器数据和融合后数据分别进行100次模型训练,并记录模型得分,根据不同传感器贡献权重不同进行决策级融合,其中权重取PSO_KNN模型得出的全局最优融合权重。图9统计了数据级和特征级融合模型在测试集上表现情况,因为决策级直接对模型得分进行融合,故没有列出。表4为3种融合层次下故障分类准确率对比,可以看出本文提出的信号数据级融合方法在轴承的故障诊断中,准确率分别高于特征级和决策级3.0%和3.4%,取得了不错的效果。
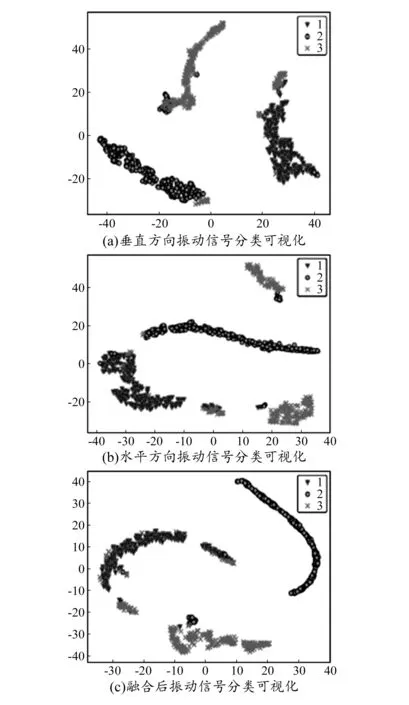
图8 不同信号分类能力可视化

图9 数据级和特征级测试集分类

表4 融合层次对比
5 结束语
本文提出一种基于粒子群优化算法和KNN算法的多源传感器数据级融合方法,在不掌握先验知识的前提下,提高了滚动轴承的故障识别率。首先使用指数加权平均处理各个传感器原始振动信号,再利用3层小波包分解剔除掉相关性较弱的分量,得到较为平滑的重构信号,实验表明,数据的预处理对于非平稳的时间序列信号具有很好的降噪和分析能力;KNN具有结构简单、易于实现、分类准确度高的特点,利用粒子群优化算法的寻优策略,将KNN算法分类结果直接作为适应度函数,得到多元传感器数据融合的最佳权重,保留了振动信号反映的完备退化信息,提高了滚动轴承故障诊断准确率和效率。在XJTU-SY滚动轴承加速寿命试验数据集上进行验证,本文方法的故障诊断率较高,在实际工程中有一定的应用价值。
猜你喜欢
大电机技术(2022年5期)2022-11-17
昆明医科大学学报(2022年1期)2022-02-28
成都信息工程大学学报(2021年1期)2021-07-22
装备制造技术(2020年2期)2020-12-14
天天爱科学(2020年6期)2020-09-10
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
疯狂英语·新读写(2020年3期)2020-06-06
浙江工业大学学报(2017年5期)2018-01-22
船海工程(2015年4期)2016-01-05
