
苗木嫁接并联破砧装置设计与运动控制研究
2022-02-06 06:46高松岩
河北农业大学学报 2022年6期
于 博,李 娜,刘 磊,高松岩
(河北农业大学 机电工程学院,河北 保定 071001)
嫁接是苗木育苗中的重要环节。目前果树嫁接主要依靠人工作业,穗木可由工人携带随用随取,而砧木生长在田间,工作空间受限且所需切削力较大,可达200 N 左右[1]。为减小工人劳动强度、降低嫁接成本,实现果树苗木嫁接的机械化作业十分重要。
近年来,国内在蔬菜机械化嫁接领域取得了较大进展,但对于果树等苗木机械化嫁接装置的研究报道相对较少[2-3]。国内对苗木嫁接装置的研究主要集中在车间嫁接模式上。中国农业大学的张铁中等研制了1 种针对白杨树苗的机械化嫁接装置[4],该装置的破砧部分采用旋转切削的方式对苗木进行破砧。陈军等研制了1 种可用于苗木嫁接的多功能嫁接剪,将砧、穗木剪成相互吻合的Ω 型接口完成嫁接[5]。赵燕平等基于传统“劈接法”设计了1 种集传送、切削、搬运和对接等装置为一体的苗木嫁接机[6],其切削部分采用旋转切刀对苗木进行切削。姜秀美等研制了1 种葡萄嫁接机[7],其切削部分采用直线驱动的切削方式。哈尔滨林业机械研究所基于传统“劈接法”研制了1 种油茶苗木嫁接机,采用气缸直推的方式实现对油茶苗木的车间机械化嫁接[8-9]。湖南农业大学以毛桃苗为对象研制了1 种苗木破砧的半旋转切削机构与基于Plug-in 接法的葡萄苗木嫁接切削机构[10]。河北农业大学研制了1种适用于不同直径配比的机械化硬枝嫁接装置[11],该装置采用直线驱动方式进行对苗木进行切削。
以上几种苗木嫁接装置均属于车间嫁接装置,不适用于工作空间受限且需多轨迹变换的田间机械化嫁接作业。针对上述田间嫁接问题,本文对传统“劈接法”进行分析,确定装置采用改进型“劈接法”进行机械化嫁接作业,并确定破砧作业所需自由度。在此基础上,基于螺旋理论建立破砧装置的基础运动螺旋系,并推导其约束螺旋系,从而确定装置基于3-RPR 机构进行设计。对装置进行运动学分析,建立运动学逆解方程,结合田间破砧作业空间限制,确定装置的结构参数。推导其力雅克比矩阵,对竖切与斜切时的各分支受力进行对比分析。结合破砧农艺过程进行运动轨迹规划,并利用ADAMS 虚拟样机仿真验证装置运动学逆解方程的正确性。基于上述分析,搭建样机平台进行试验。对不同高度、不同直径以及不同生长方向3 种情况的苗木进行破砧试验,验证装置的可行性。
1 机械化嫁接方法与破砧自由度分析
通过对华北地区苹果苗木种植基地的实地考察,苗木种植行距为15 ~25 cm,株距为5 ~10 cm,嫁接高度为10 ~30 cm,苗木直径范围为6 ~18 mm,工作空间受限。嫁接方法多采用劈接法。因此,为满足农艺要求以及实际生产需要,本文对传统“劈接法”进行分析以实现苗木嫁接,即在砧木上方劈开一道切口,将穗木削成楔形插入切口中,再进行密封处理完成嫁接[12]。
对于传统“劈接法”,砧木切口容易合拢,在机械化嫁接时穗木不易插进切口。同时切削深度过深易使砧木发生开裂现象,从而影响嫁接成活率。因此装置采用改进型“劈接法”[13]进行机械化嫁接作业,其切口形状如图1 所示。首先对砧木竖切一定深度,然后将切刀旋转1 个角度后再对砧木进行斜切,使两切面形成1 个夹角θ,并去除中间材料使砧木切口呈“V”型。图中a为竖切面长度,b为斜切面长度,d为砧木直径,θ为两切面夹角。其中,a、b切面长度与直径d、夹角θ的关系为:

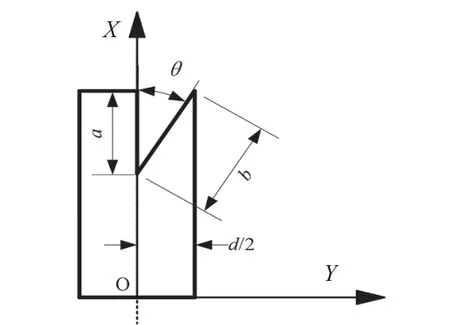
图1 改进型“劈接法”砧木切口Fig.1 Improved “split grafting” rootstock incision
此方法去除了切口中间材料,便于实现机械化嫁接的对接工序。采用两刀对砧木进行切削,有效减少了砧木因切口过深而发生开裂现象。因此本文选择改进型“劈接法”法作为装置机械化嫁接的作业方式。并对此方法在破砧作业中所需自由度进行分析。
如图1 所示,破砧作业过程中,需要在砧木轴向切面xoy平面内进行竖切、斜切以及位姿变换3 种运动。相对应的破砧装置需要具有在砧木轴向切面内移动及绕轴向切面法线转动3 个自由度以完成破砧作业。因此,基于螺旋理论[14-15]该装置的基础运动螺旋系应为:

其约束螺旋系为:

此约束螺旋系表示为沿z方向的约束力线矢和绕x、y方向的约束力偶。为保证装置具有2 移动(Translation)1 转动(Rotation)(2T1 R)的3 个自由度,其分支约束螺旋系应与动平台约束螺旋系相同,则分支约束螺旋系也由1 个约束力线矢和2 个约束力偶组成。能产生这种约束的串联分支有RPR、RRR 和PRR 等支链。
通过前期对苹果苗木进行切削力实验,受力情况如图2 所示。刀切阻力最大为195.5 N,锯切阻力最大为96.7 N,切削力较大。结合上述情况,并综合考虑装置整体分布、结构紧凑等性能要求,确定破砧装置基于3-RPR 机构进行设计。该机构可实现受限空间内多轨迹变换,从而实现机械化嫁接破砧过程中的竖切、斜切和位姿变换等工步。由于切削力在振动减阻[16]作用下可有效降低,因此采用振动式锯切机作为切刀对苗木进行破砧作业。
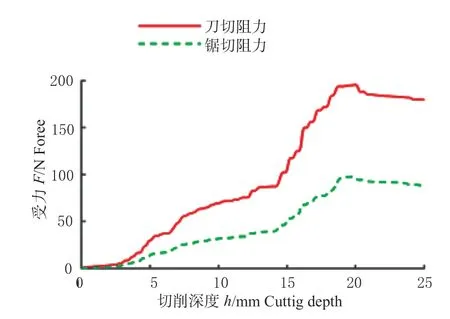
图2 2 种切削方式受力对比Fig.2 Force comparison of the two cutting methods
2 并联破砧装置结构设计及工作原理
结合机械化嫁接农艺要求,对并联破砧装置进行整体结构设计,如图3 所示。装置整体由5 部分组成:定平台部分、动平台部分、驱动部分、定位夹紧部分和切削部分。前盖板和后底板连接在2 个侧板上作为定平台,同时也作为装置机架。直线电机与电机座以及电机座两侧的阶梯销轴与定平台通过旋转副连接,直线电机作为驱动副,为装置提供动力输入。电机座上装有位置传感器,通过感应电机轴上的止动环进行寻零。3 条支链的末端通过与动平台铰接形成3 个旋转副。2 块尼龙板分别连接在前盖板和后底板上,为3 个直线电机的输出轴提供导向,同时对其进行约束以减少动平台的抖动。动平台上装有振动式锯切机作为切削工具对砧木进行破砧。后底板的下端装有夹紧气缸,夹紧气缸通过夹紧手爪将砧木压紧在夹紧挡板上,实现砧木的定位与夹紧。
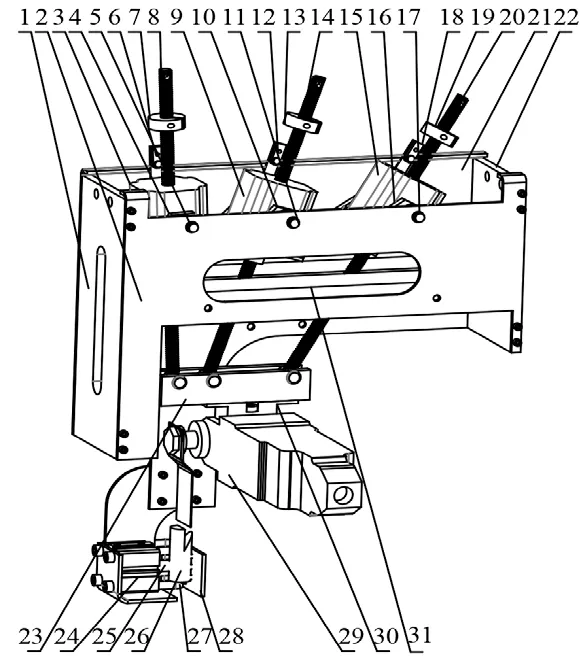
图3 并联破砧装置结构Fig.3 Structure of parallel cutting rootstock device
进行破砧作业时,首先将待切削的砧木置于定位端面处,夹紧手爪将砧木压紧在夹紧挡板上;然后选取对应直径范围的驱动参数文档加载到上位机中,上位机向控制板传输数据,并驱动电机按照规划轨迹运动进行破砧;切削完成后夹紧手爪收回。
3 装置运动学建模与轨迹规划
3.1 装置运动学逆解分析
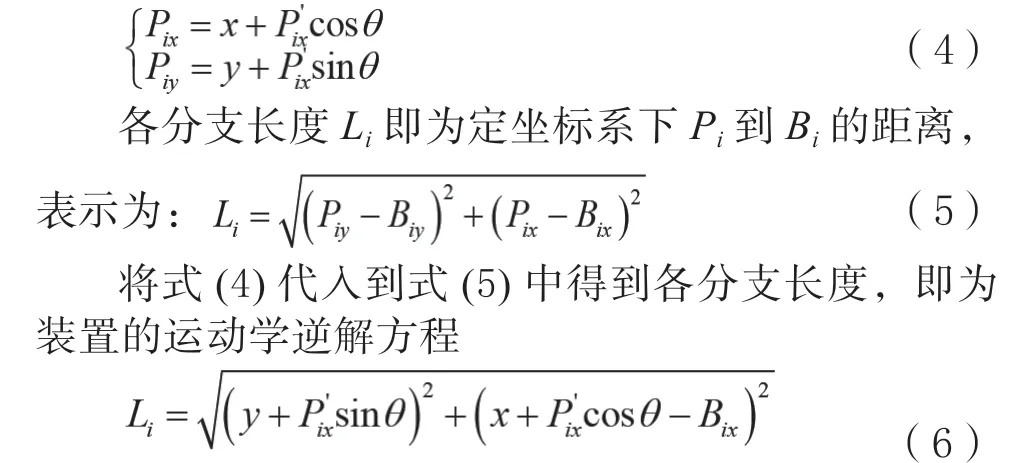
并联破砧装置需按照给定轨迹进行运动,以完成机械化嫁接破砧作业中的竖切、斜切和位姿变换等工步,因此需要对装置进行运动学逆解分析,得到装置的输入量Li(i=1,2,3);并将输入量转化为各分支的驱动控制参数,结合破砧作业运动轨迹规划实现装置的运动控制[17-19]。
运动学逆解即已知装置的输出位姿量(x,y,θ),对装置的输入量(L1,L2,L3)进行求解的过程[20-21]。建立如图4 所示坐标系。
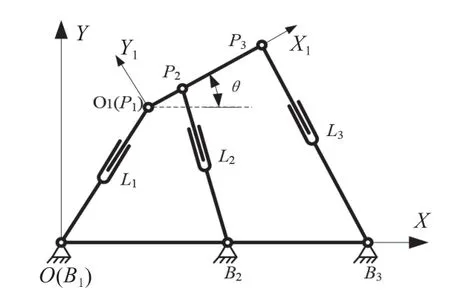
图4 3-RPR 结构简图Fig.4 Structure diagram of 3-RPR
设定坐标系XOY以B1为原点,且定平台上3个铰接点Bi(i=1,2,3)连线与定坐标系的X轴重合,故各分支与定平台铰接点Bi(i=1,2,3)在定坐标系中的坐标为Bi=[Bix,0]T。设动坐标系X1O1Y1以P1为原点,且动平台上3 个铰接点连线与动坐标系的X1轴重合,故各分支与动平台铰接点Pi在动坐标系中的坐标为P′i=[,0]T。设动坐标系X1O1Y1的X1轴与水平方向夹角为θ,P1点在定坐标系中的坐标为P1(x,y),且动坐标系相对于定坐标系的旋转矩阵为,从而可以得到Pi在定坐标系中的位置Pi=[Pix,Piy]T。其中Pi=P1+QPi',可计算Pi在定坐标系中的矢量表达为:
结合改进型“劈接法”的机械化嫁接农艺要求,确定砧木切口夹角θ的范围为15°~25°。根据式(1)计算竖切面长度为6.4 ~33.6 mm,斜切面长度为7.1 ~34.7 mm。基于运动学逆解方程,结合田间破砧作业空间限制与作业要求,确定并联破砧装置的结构参数,如表1 所示。

表1 装置结构参数Table 1 Structure parameters of the device
将式(6)两边同时对时间求导得:

经计算,装置的雅克比矩阵为:

则装置的力雅克比JT矩阵为:

为验证装置振动减阻效果,分别以刀切和锯切实验受力为外载荷,基于装置的力雅克比矩阵对竖切与斜切时各分支受力进行分析。分支受力曲线如图5 所示,分支受力结果如表2 所示,其中Fi(i=1,2,3)代表各分支受力。结果显示,竖切过程各分支峰值受力分别下降了16.6%、20.1%、13.7%;斜切过程各分支峰值受力分别下降了15.8%、24.1%、23.4%。采用振动式锯切机作为切刀对苗木进行破砧作业,可有效降低所需破砧力。
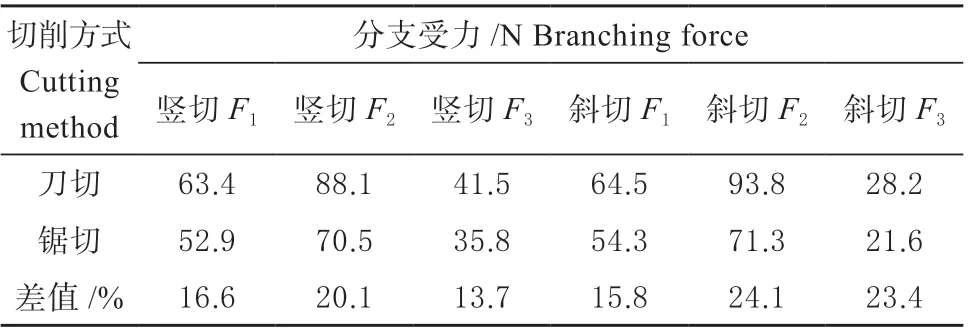
表2 各分支受力结果Table 2 Force results of each branch
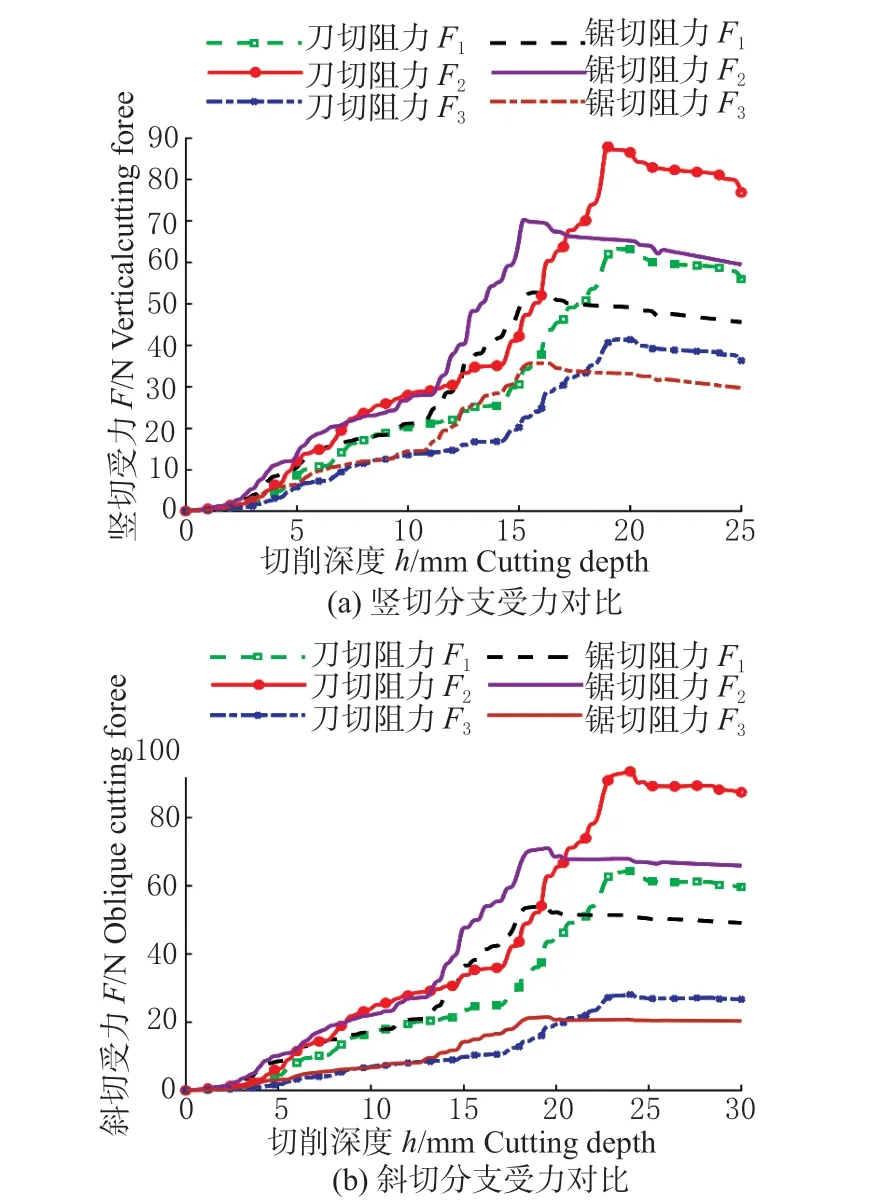
图5 分支受力对比Fig. 5 Contrast of forces on branches
3.2 运动轨迹规划

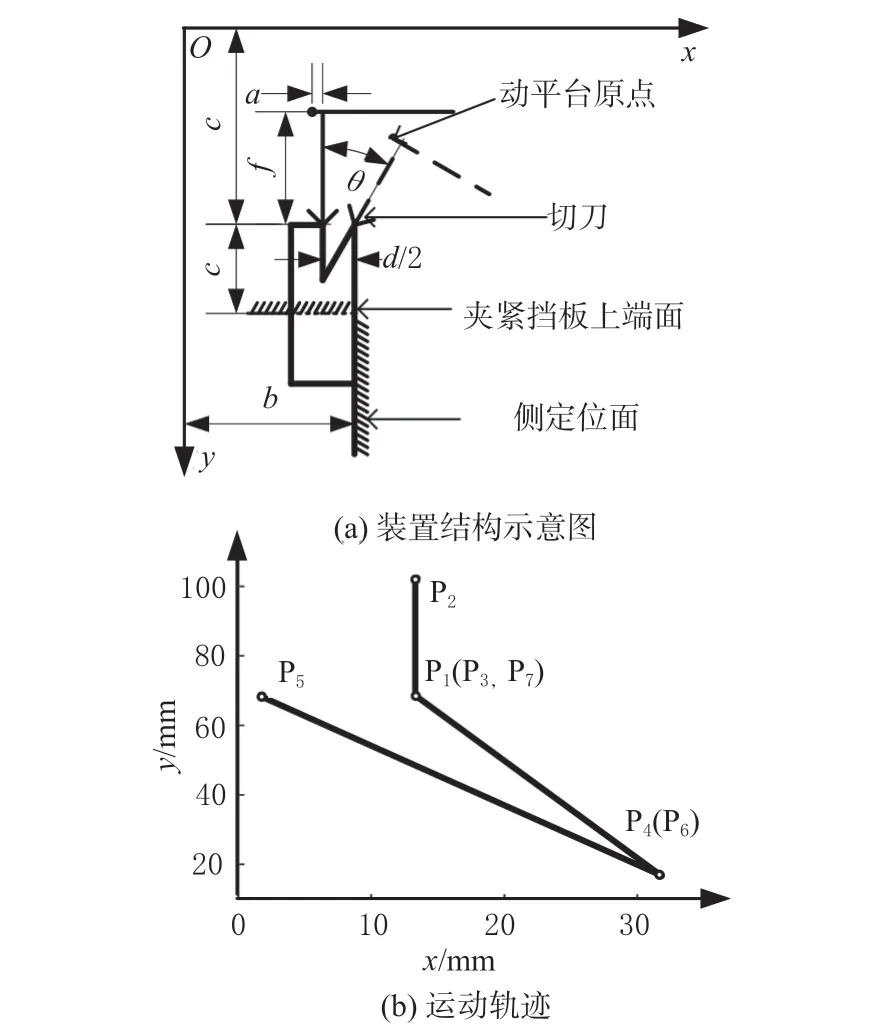
图6 装置结构示意图及运动轨迹Fig.6 Structure diagram of device and motion trajectory
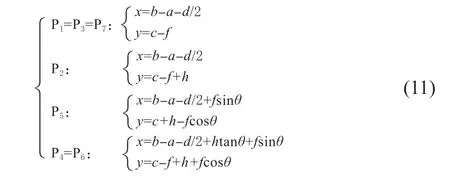
图中各轨迹点坐标计算如下:
3.3 运动学仿真分析
以苗木直径为18 mm 的运动轨迹为例,对装置进行运动学仿真。由式(11)可计算各轨迹点的坐标,结果如表3 所示。
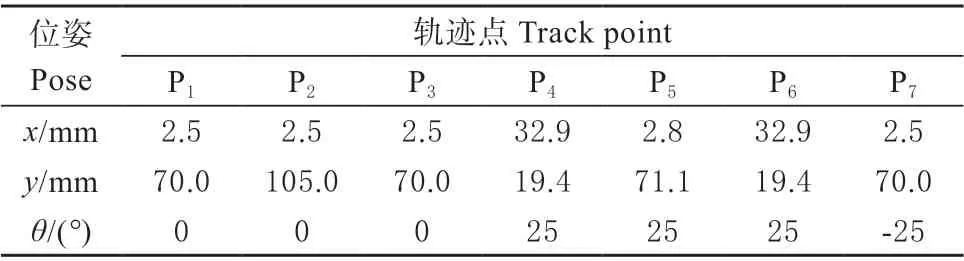
表3 各轨迹点坐标Table 3 Coordinates of each track point
首先,在ADAMS 中进行并联破砧装置虚拟样机的搭建,并对装置铰链和驱动电机分别添加旋转副约束与移动副约束。然后,对装置动平台的运动轨迹进行运动函数的编写,得到运动时间与动平台位姿的关系。将其作为输入数据,以Data Text 的形式导入到ADAMS 中,生成时间(Time)和位姿变量(Variate)的Spline 曲线。最后,利用ADAMS 的CUBSPL 函数生成动平台的驱动函数,并对动平台添加General Point Motion 驱动进行仿真。
仿真结束后,在PostPorocessor 模块输出各分支驱动杆伸长量随时间的变化曲线,将其与Matlab中通过逆解方程计算的各分支驱动杆伸长量的曲线对比,如图7 所示。结果显示,两者得到的结果相吻合,验证了本文逆解方程的正确性。
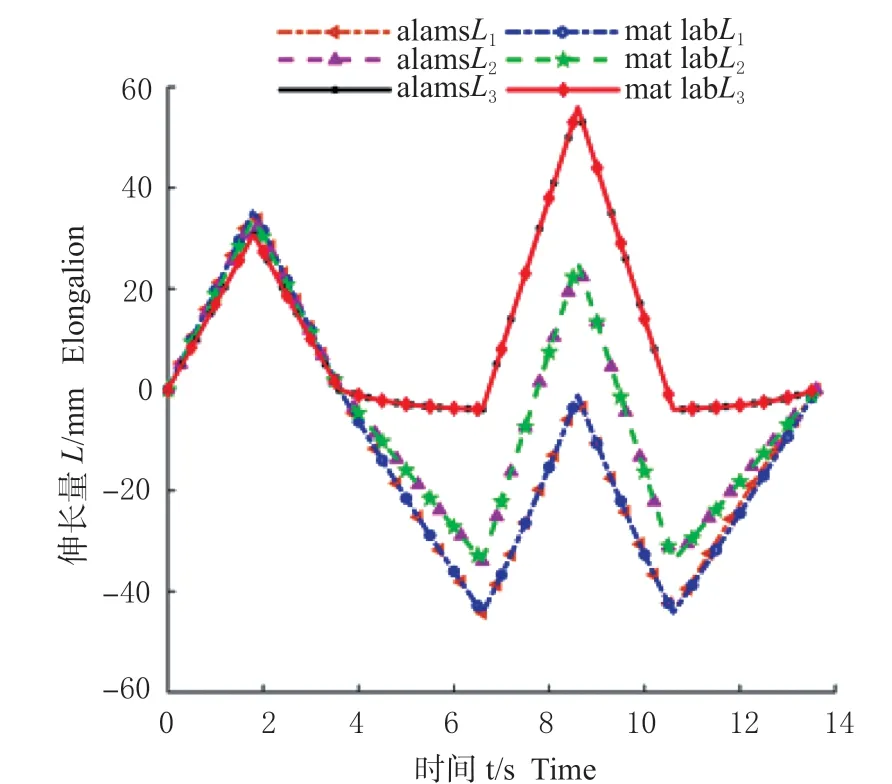
图7 各分支伸长量对比Fig.7 Comparison of the elongation of each branch
4 并联破砧装置样机试验
4.1 并联破砧装置样机
搭建并联破砧装置样机试验平台进行试验,如图8 所示。并联破砧装置样机试验平台由并联破砧装置、嫁接辅助机械臂和控制系统3 部分组成。
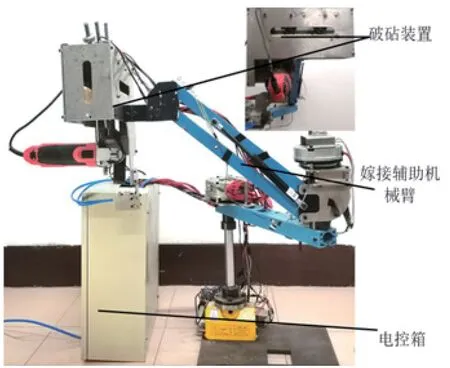
图8 并联破砧装置样机Fig.8 Prototype of parallel cutting rootstock device
考虑到田间作业的非结构化农业环境因素与苗木生长的自然差异,本文采用人与无动力机械臂[22-23]协作的方式进行破砧作业。工作时,由操作者牵引机械臂并触发压力开关,解除其关节制动状态;当破砧装置的定位夹紧部分运动至待嫁接苗木处,通过电磁制动对机械臂关节锁紧;然后由破砧装置进行破砧作业。一次破砧作业结束后,将装置牵引至下一株待嫁接苗木处进行循环作业。
4.2 破砧试验
由于苗木生长的自然差异,分别对不同高度、不同直径以及不同生长方向3 种情况下的苗木进行破砧试验。基于田间破砧作业要求,确定每组破砧试验中苗木高度为10、20、30 cm;苗木直径为6、12、18 mm;苗木生长方向与竖直方向夹角为0°、15°、30°。对每种情况下的苗木进行50 组试验,即150 次破砧试验,测试破砧装置的可行性。装置破砧试验成功的评判标准是装置按照规定轨迹运动,完成砧木“V”型口的切削,且去除的材料完全掉落。
如图9 所示,图(a)为试验过程中竖切进刀时刻,图(b)为试验过程中竖切退刀时刻,图(c)为试验过程中位姿变换时刻,图(d)为试验过程中斜切进刀时刻,图(e)为试验过程中斜切退刀时刻,图(f)为试验过程中回零时刻,图中框线区域为破砧部分。如图10 所示,图(a)为苗木高度不同时的样机试验,图(b)为苗木直径不同时的样机试验,图(c)为苗木生长方向不同时的样机试验。
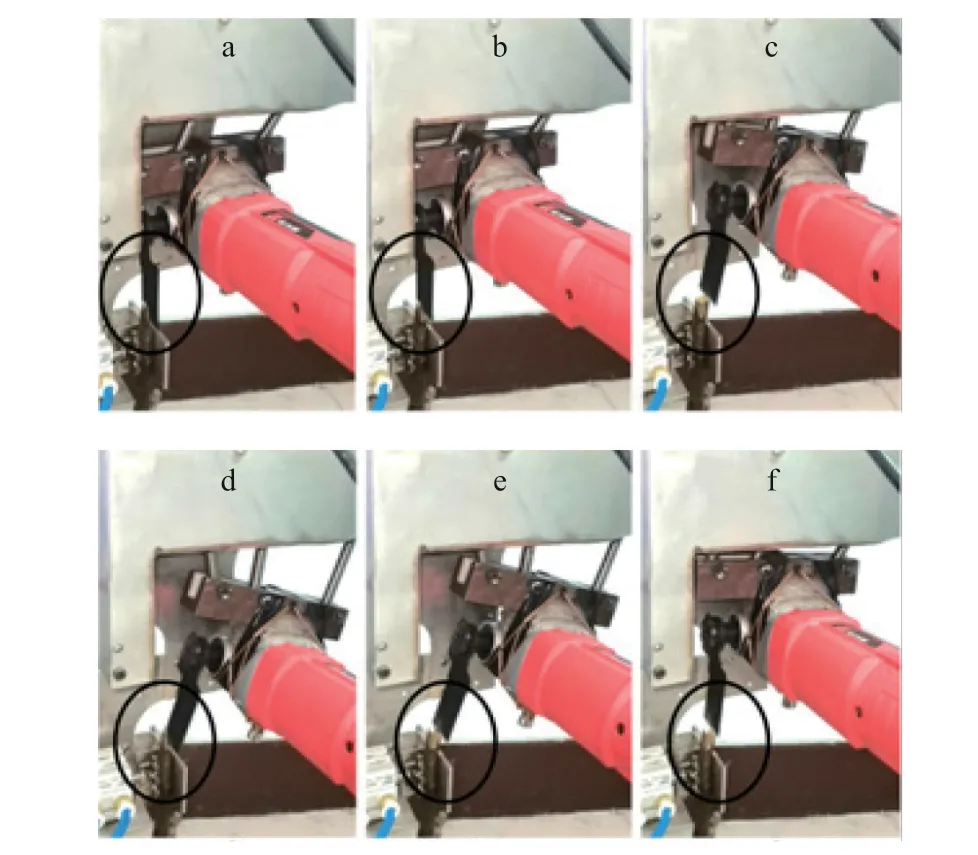
图9 破砧试验过程Fig. 9 The process of cutting rootstock test
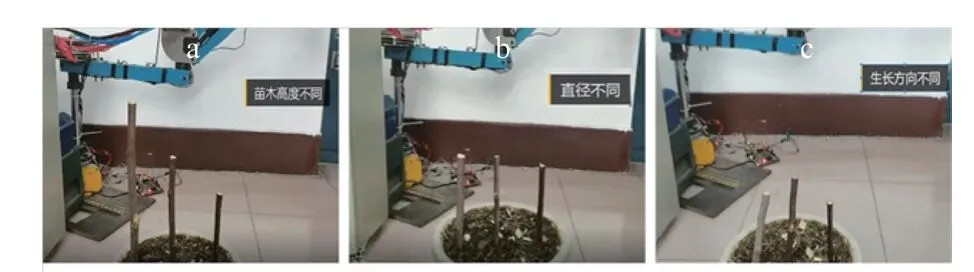
图10 不同生长情况破砧试验Fig. 10 Cutrootstock test under different growth conditions
通过对不同高度、不同直径以及不同生长方向3 种情况的苗木进行样机试验,结果如表4 所示。其中苗木高度不同时破砧成功率为96%,直径不同时破砧成功率为94%,生长方向不同时破砧成功率为92%,经计算样机平均破砧成功率为94%。试验结果表明该破砧装置可完成各工况下的破砧作业,其平均破砧成功率为94%,破砧性能优异。
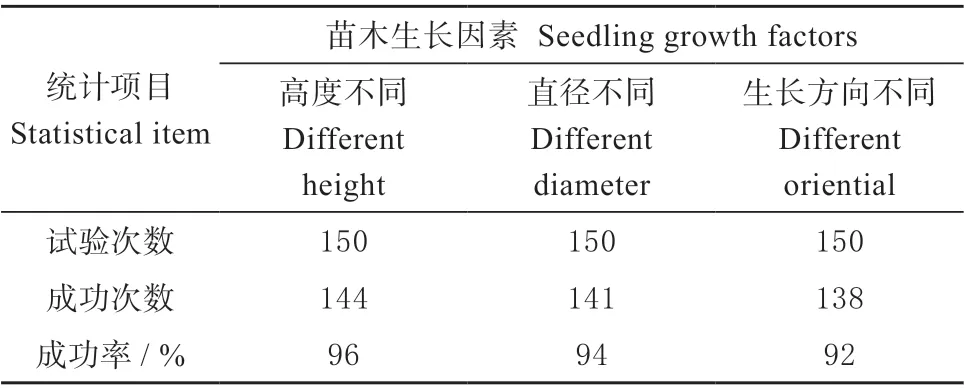
表4 破砧试验结果Table 4 Test results of cutting rootstock
5 结论
(1)本文设计了1 种适用于田间苗木嫁接的并联破砧装置,采用振动式锯切机作为切刀实现振动减阻。结合改进型“劈接法”的农艺要求,确定破砧装置需要具有在砧木轴向切面内移动及绕轴向切面法线转动3 个自由度以完成破砧作业,从而确定装置基于3-RPR 机构进行设计。
(2)基于矢量法建立了装置的运动学逆解方程,在此基础上结合田间破砧作业空间限制,确定装置的结构参数;推导了装置的力雅克比矩阵,并对各分支受力进行分析,结果表明采用振动式锯切机进行破砧作业,装置各分支受力最少可减小13.7%;在此基础上,结合破砧农艺过程进行运动轨迹规划,并基于ADAMS 虚拟样机仿真验证了装置运动学逆解方程的正确性。
(3)通过对不同高度、不同直径以及不同生长方向3 种情况的苗木进行破砧试验,其破砧成功率分别为96%、94%、92%。经计算该装置在不同工况下的平均破砧成功率为94%,可实现破砧作业。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
中学生数理化·中考版(2021年10期)2021-11-22
落叶果树(2021年6期)2021-02-12
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
河北果树(2020年2期)2020-05-25
电子制作(2019年23期)2019-02-23
消费导刊(2018年8期)2018-05-25
现代园艺(2017年21期)2018-01-03
中国棉花(2017年10期)2017-11-04
