风对船舶DP 定位过程中最佳航向的影响
2022-02-08 07:05刘伟东
广东造船 2022年5期
刘伟东
(广船国际有限公司,广州 511462)
1 前言
船舶动力定位系统是指船舶利用自身的动力去反向作用于外界干扰,使船舶保持在某个固定位置。该系统主要包含:动力推进系统;环境信号检测系统;船舶计算机处理系统三个分组成。计算机处理中心通过解算外部环境的干扰力,发出执行相反作用力的动作指令,并由动力设备根据指令做出相应的动力输出。
影响船舶定位性能的外部因素很多,主要是海风、洋流、浪高等。洋流、浪高的变化速率较低,基本上作用于船体水面以下的部分;风是产生洋流、海浪的主因,它吹向船体的上建部分引起船体的左右和上下晃动,严重影响船体的稳定。在海试调试动力系统的时候,必须认真考虑风对船体干扰的影响。本文通过数学计算得出风力和船体力的关系,然后通过软件模拟测试出航向和风的关系。
2 风对船舶得作用力
2.1 风速和风向
由于海面有洋流,因此船舶在海面不是固定不动的;风相对于船舶来说也不是固定的,所以船舶上感觉的风速和风向都是相对的:绝对风速(也叫真风)是陆地上观察到的风;而对于运动中的船舶来说,相对风速和风向是利用船上的仪器测量的风速和风向。如图1 所示:真风速用VΤ表示,真风向用ψΤ表示,规定正北向风的ψΤ为0°,正东方风为90°,风向范围是0°~360°;海面船舶受到的风均为相对风,而相对风向角(风和船首航向的夹角)αR和相对风速VR可以用风速风向仪测量。设定风自左舷吹来时为正向,即> 0;风从右舷吹来时为负向,即< 0;对于船舶本身来说,相对风向的变化范围为-180°~180°。
图1 为风、洋流对船舶作用力示意图。
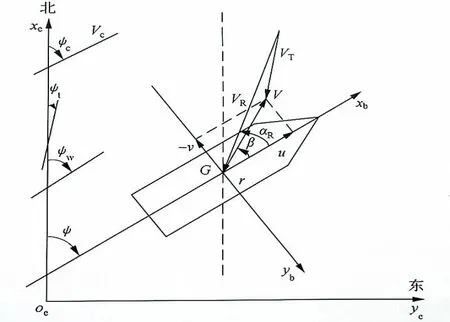
图1 风、洋流对船舶作用力示意图
u、υ、r分别为V在沿船舶中轴线(首向为正)、垂直船舶中轴线(船舶右舷为正)及垂直于海面(向上为正)的速度分量;
β为漂移角度;
ψ为航向角;
VΤ、ψΤ、VR、αR分别为绝对风速、绝对风舷角、相对风速、相对风舷角;
ψw为海浪方向:
Vc、ψc分别为洋流速度和方向。
相对风速、真风速及船速的关系如下:

2.2 风力与风力矩系数
船舶在海面漂浮随时受到海风和洋流的作用,不会以一个固定方向和直线方式运动,而是随着船体转动曲线行进的。因此,风会以力矩的形式作用于船舶上,所以,计算时要以力矩去计算风力对船舶的影响。对于水面船舶,可只考虑外力对船舶引起高低震荡、左右横移和船首向转向三个方向上的平均作用力和力矩,用矢量形式表示如下:

式中:
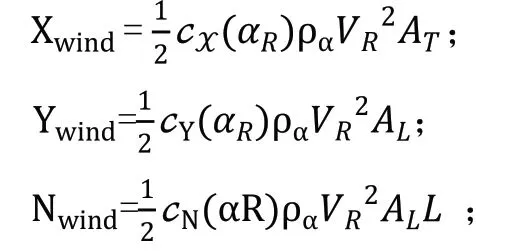
cx、cY定义为风力系数;
cN为风力矩系数;
ρα为空气的密度(kg/m³);
AT、AL为正向作用力面积和侧向作用力面积,可以理解成投影面积( m² );
L为船长( m );
VR为相对风速(kn)。
由于不同的海洋环境风力系数是不同的,通常都是采用经验方式进行估算,艾什伍德提出了风力和风力矩系数的估算公式[2]如下:
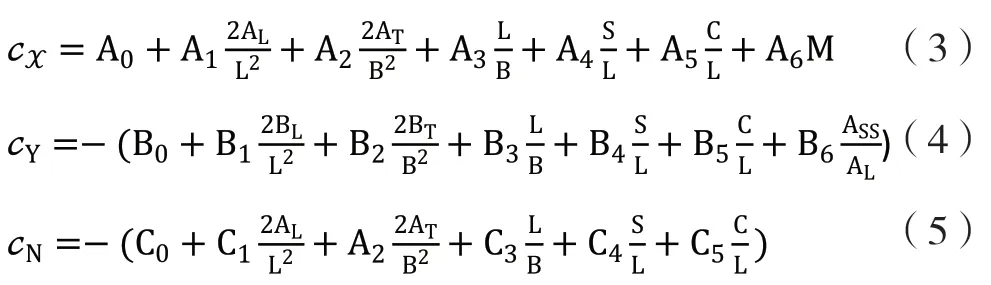
图2 是利用软件模型输入系数的数值,经过模拟得出的风力和风力矩图。
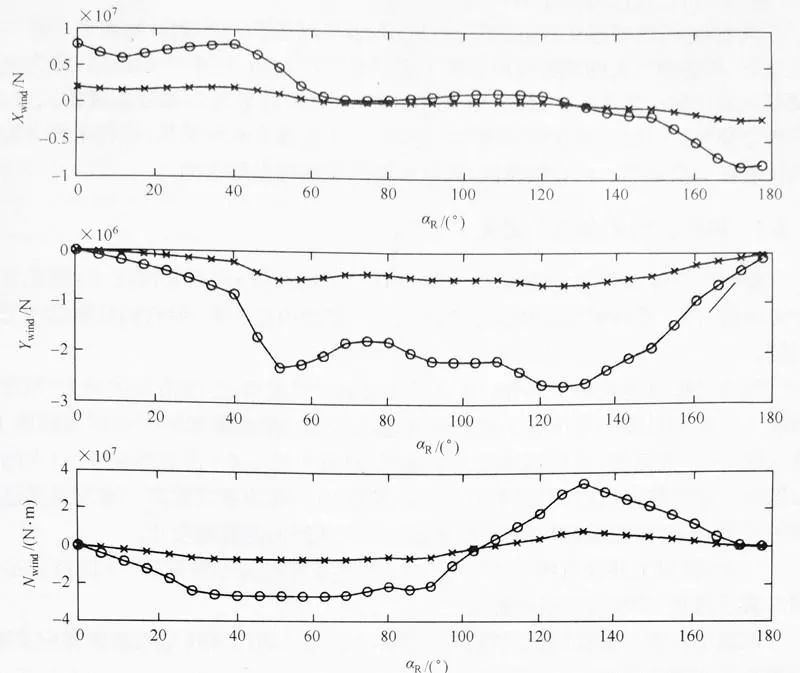
图2 利用软件计算出的风力及风力矩
图2 中,×表示风速10 m/s,○表示风速30 m/s。从模拟结果可以看出:因为大部分船舶都是细长型的,风速越高,船体受到的风力和力矩也就越大;顺着船体中轴线方向的受风面积较小,风力和风力矩也较小;垂直船首中线的受风面积较大,风力和风力矩也较大。也就是说,当船首或者船尾正面顶风或逆风行驶时,船体所承受的风力及力矩最小,即外部风干扰力最小,定位性能最稳定,精度也越高。
3 选择船舶最佳航向的方式
装有动力定位的船舶,都是长期工作在一个固定的位置,希望船舶的位置偏差和摇晃角度都比较小。当处于最合适航向时,动力推进器仅输出较小动力就能保持船位;如果受外力干扰船舶偏离了当前航向,推进器就要输出推力去抵消这个干扰力,推力的大小和和干扰力的大小成正比。如果干扰力超过了输出动力的界限,就会造成定位失败,无法保证航向的稳定,即工程作业失败,所以工程作业前都需先找一个最合适的船舶航向,或者来回摆动幅度最小的航向;但是由于船舶在海面浮动不稳定,不可能一下子就测量出周围的风和海流的相关数据,因此航海人员根据经验找出了两个确定最佳航向的方法:
(1)第一种方法是客观的现场巡航法。它需要观察和检测船舶前进方向和左右方向的推进器的推力,当船转到某个航向时,如果侧推力为输出最小或者为零,则此时航向为最佳航向角。这种方法的好处是简单方便,不需要高级设备的检测模型计算,且适用于任何等级的动力定位船舶;缺点是能耗较高,有时需要来回转圈很长时间去比较,尤其是当外部海面环境变化较快时能耗更多,但是最终可通过一段时间的能耗来寻找出最佳航向,从而降低后期长时间工程作业的能耗,还是比较划算的。
(2)第二种方法就是通过增加计算机设备,建立软件计算模型,通过测量海面环境各项数据并进行比较计算后确定船舶最佳航向。这种方法的好处是不需要较大的能耗就能找到最佳航向;缺点是软件模型精度计算不高,计算出的洋流数据有一定误差,最终最佳航向也会有偏差,有时计算的结果可能与实际观测到的洋流表面相差太大,可能是暗涌的存在,这就需要有经验的航海人员现场确定能否进行定位作业。目前大部分动力定位船舶都采用这种方式,包括我司建造的所有等级的动力定位船舶都是采用此方法。
4 船舶定位的外部干扰力和风向的关系
船舶定位的外部干扰力主要包括:海风、洋流、海浪等。有时较大的雨量也会对船体产生冲击作用力,此时船舶一般会停止作业,所以只需考虑常见的海风和洋流的影响。那么如何利用船舶自身发动机的推力去抵消这些外来力对船体的影响,这就需要动力定位系统设计人员利用数学理论计算,并用实验室的专业设备进行不断的试验,检测计算结果是否正确。
下面介绍国内某校研究所结合某型船的船体参数进行的矩阵实验室仿真软件测试校验:实验船的配置为尾部两个螺旋桨推进器(主推进器)、三个侧推进器和两个转向为90°范围角的转页舵:船尾平行于船体中轴线的两侧,平行对称布置两个主推进器;两个转页舵,分别布置在两个主推进器后面;船鼻首后面,布置两个侧向推进器;船尾布置一个侧向推进器;三个侧推进器的方向并列垂直于船体中轴线,尾侧推进器要求在船体中心和重心点之后。
测试过程中,船舶航向始终指向某一个固定的位置,也可叫做定锚转向。在程序中输入设置单独的某个方向的洋流和海风两个外力的方向和大小,这两个是海洋中最常见的能使船舶移位的外力,由于一般洋流是跟海风同向而行的,因此把两个外力方向都设置成235°;船舶速度设置为2 kn,模拟采集数据的时间间隔设置为1 s。设置完成后,启动动力定位轨迹跟踪显示程序,便可以显示曲线轨迹图,记录数据后转换船舶操舵模式进入自动航行状态,并开始寻找最佳航向模式,观察船舶移动过程中的轨迹图以及航向的变化过程。从图3 可以看到:船舶航向最终停留在60°方向附近并稳定下来,大致与海域中风的吹来方向相反。由于我们设置的船体排水量较小,从开始到稳定航向耗时也比较短,大约10 min 左右就可以初步稳定。
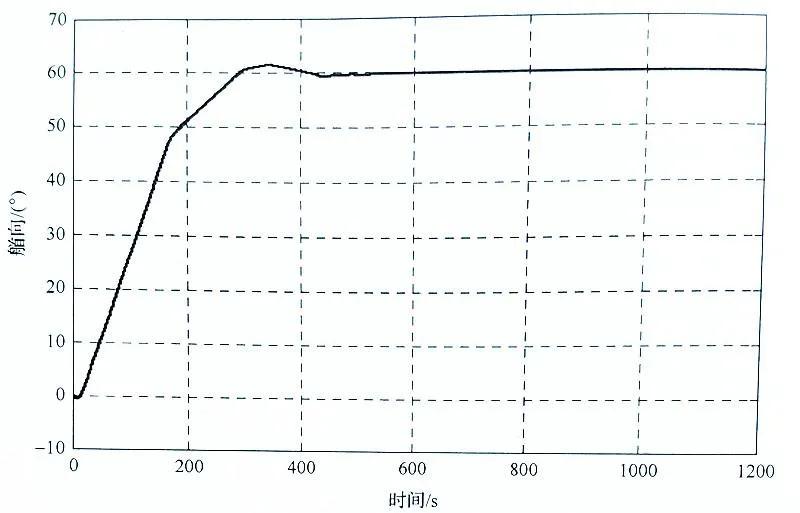
图3 船舶航向变化轨迹图
经过多次模拟,最后稳定的船舶航向始终与外部干扰力的合力方向相反,基本上就是与海风吹来的方向相反。根据地理知识,我们可以了解到海面洋流是由于海风引起,并且洋流的速度和海风的速度成正比状态,海风是干扰船舶定位的外力主因,那么就可以基本确定船舶航向就是与风吹来方向相反,即顶风逆流向。
5 实际调试应用
船舶设计时,都会在船底和桅杆处安装多个测量设备用来测量海域海流和风的方向、速度等外部干扰力的数据,然后通过系统的软件参数设定和实地系统建模,计算出推进器推力的大小,软件程序锁定后,实际操作船舶检验定位的精度,确保实现定位功能。由于每艘船的配置不同,有时即使是同系列船,由于同种设备的性能有差异,其发挥的作用就会不同,意味着每一艘船的系统软件模型是唯一的,所以建模就是为了把所有设备都调试到最出色的高效临界点,达到最优的定位性能。
动力系统的软件计算模型中,一般采用伺服前馈-反馈复合控制的方式来抵消外部作用力的影响,反馈的程序中也包含了船舶本身设备的输出能效等相关参数设置。目前,由于国外技术封锁,我们正在努力摸索进一步解决整个技术壁垒,实现国产动力定位系统的普及推广。图4 为DP 系统模型完成后形成的定位能力图[1],可以直观地看到风向位于船尾或者船首时定位性能较强,而风向位于两舷时定位能力比较差,所以相关船舶在海上进行工程作业时,都是定位在顶风逆流状态下再进行作业的,可以大大提高定位的稳定性,降低出现差错定位和事故的概率。
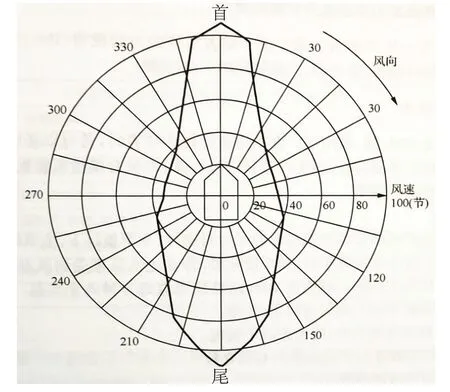
图4 动力定位能力图
6 结束语
通过简单介绍装有动力定位系统的船舶在定位过程中确认船首向的初步原理,展示了风对船舶定位性能影响效果,有助于大家对相关船舶的调试进行了解,积累调试经验。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
中学生数理化·八年级物理人教版(2022年12期)2022-02-14
新世纪智能(高一语文)(2021年3期)2021-07-16
舰船科学技术(2021年12期)2021-03-29
民用飞机设计与研究(2019年4期)2019-05-21
儿童故事画报·自然探秘(2019年4期)2019-05-14
时代英语·高一(2019年1期)2019-03-13
当代陕西(2018年12期)2018-08-04
成都信息工程大学学报(2017年6期)2017-03-16
电子制作(2017年24期)2017-02-02