船舶自主航行关键技术研发态势专利分析与对策研究
2022-02-09 16:51胡神松刘林勇
中国水运 2022年1期
关键词:专利分析
胡神松 刘林勇



摘 要:船舶自主航行技术是我国智能船舶产业发展的重要技术发展方向,从专利统计层面分析该技术领域的全球研发态势,包括申请趋势、主要技术类别技术来源国及其价值度、技术发展路线;并且利用3D专利地图实现技术热点可视化分析。总体来看,该技术领域正处于快速发展期,技术有向着与算法、神经网络等技术融合发展趋势,技术热点集中在航迹追踪、碰撞决策、船舶姿态感知等。在专利分析基础上,为我国该技术领域产业发展提出相应对策和建议。
关键词:专利分析;自主航行;技术发展路线;专利布局
中图分类号:D92 文献标识码:A 文章编号:1006—7973(2022)01-0031-03
随着大数据、云计算、人工智能、物联网等技术的发展,带动和引领了航运业一系列的产业发展与变革[1]。由于航运业随着船舶数量的增加和船舶大型化的发展,在人力成本、环境保护等方面面临重大挑战[2],船舶自主化智能化便应运而生,成为航运业的产业升级关注热点。从产业政策上看,2018年12月,工信部、交通运输部和国防科工局联合印发《智能船舶发展行动计划(2019-2021年)》为加快智能船舶产业布局,促进我国船舶工业高质量发展提供了政策指引。其中,船舶自主航行相关技术正在成为许多国家重点关注和发展的关键技术,从政策和产业上给予较大的扶持和发展。而专利作为体现技术发展态势最直接的数据资源之一,对全球船舶自主航行关键技术领域全球专利布局和竞争态势的分析有助于把握该技术的整体发展脉络,为技术研发布局和产业发展提供参考。
1数据来源及分析方法
本次研究的专利数据通过全球性专利数据库智慧芽(Patsnap)采集。在检索策略上,梳理船舶自主航行关键技术,确定技术关键词,通过查表法和归纳法确定技术分支的IPC分类号,为减少噪音专利文献以“关键词+分类号”的检索方法采集专利数据集,之后通过数据清洗和去重降噪,得到本次专利数据分析样本,并通过excel等分析工具进行深度标引与统计分析,检索日期为2021年7月21日。
2 全球船舶自主航行关键技术研发布局态势
2.1专利申请趋势分析
如图1所示,态势感知、自动避撞和航行控制三大分支技术领域整体呈上升趋势,而态势感知技术自2016年专利申请量开始远超其他技术领域,始终保持高速增长状态。从全球船舶自主航行的总体申请趋势来看,该技术领域的发展大致可以划分为两个阶段:
技术萌芽阶段:2000年到2008年,在该时期专利年申请量不足20件,相对处于初步探索阶段。在这一时期,伴随着智能传感器在各行业领域的广泛运用,船舶航行感知和探测识别技术进一步发展。
(2)技术发展阶段:从2009年至今,该技术领域专利申请量增长迅速,尤其是自2016年起,进入高速发展阶段。这一阶段的快速增长,不仅得益于“互联网+”、人工智能、大数据算法等技术的兴起,同时也离不开各国产业政策的引导与扶持。以我国为例,2015年发布的《中国制造2025》明确指出要发展高技术船舶,2018年《智能船舶发展行动计划〈2019~2021年〉》具体指出我国高技术船舶发展的方向,其中船舶自主航行技术是智能船舶发展的重要方向之一。因此,在新兴技术发展和产业政策促进下,船舶自主航行技术正处于高速发展阶段。
2.2 主要国家专利技术类别及价值度分析
如图2所示,气泡大小代表专利数量,直观反映关键技术来源国的IPC技术类别布局状况,同时基于智慧芽数据库对专利价值的估值分析,选取价值度大于$5000定义为“高价值专利”,通过气泡饼图进一步反应相应国家在相应技术类别的“高价值专利”分布情况。从专利类别来看,中国在G05D1(陆地、水上、空中或太空中的运载工具的位置、航道、高度或姿态的控制,例如自动驾驶仪)、G08G3(海上航行器的交通控制系统)、G06K9(用于阅读或识别印刷或书写字符或者用于识别图形,例如,指纹的方法或装置)、G01C21(导航;不包含在G01C1/00至G01C19/00组中的导航仪器)等技术领域均处于领先地位,且在G05D1布局最广。从专利价值度分布来看,中国虽然专利数量多,但是在各技术类别专利价值度大于$5000的专利比例均未超过20%,韩、美两国在G05D1和G08G3技术领域的“高价值专利”比例接近60%。这反映出我国在该技术领域的专利申请量大,技术活跃度最高,但专利整体质量尚存在不足。
2.3专利技术路线发展分析
如图3所示,反映了船舶自主导航关键技术演进发展情况。在船舶态势感知技术方面,从单纯通过传感器对于船舶行驶参数的测量装置,逐步向态势感知数据融合技术和方法发展,引入D-S证据理论,神经网络等方法,增强船舶对于自身状况和周围环境的感知。在自动避撞技术方面,前期主要集中在对于障碍物的识别,通过视觉、红外、雷达等传感系统识别障碍物予以规避,之后在障碍物探测方面向多源传感信息融合方面发展,同时面对复杂多变的碰撞问题,基于强化学习、证据理论、前景理论等避撞决策分析及优化方法是技术发展路线的关键点之一。在航行控制技术方面,船舶的航向控制和航迹控制是船舶自主航行的关键环节,以RU2155142C1专利为代表的船舶自动控制装置实现了初步的航向和航迹控制,之后引入伺服控制系统提高船舶控制的精度,进一步地基于模糊算法、深度学习等控制方法的引入使船舶航行控制技术快速发展。技术路线的演进反映了多源传感信息融合以及基于深度学习,神经网络等机器学习技术的引入逐渐成为自主航行技术的研发趋势。
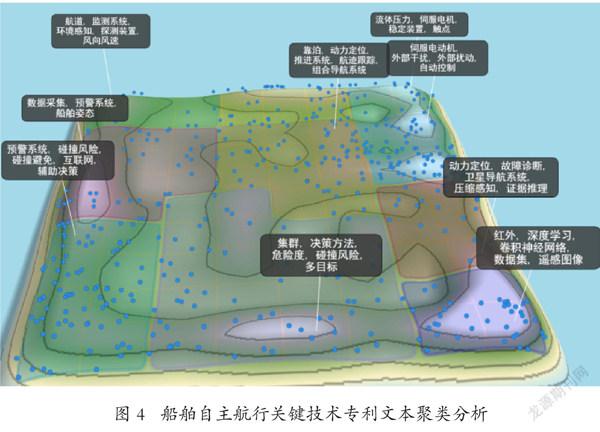
2.4热点技术专利地图分析
如图4所示,其中,专利地图山峰代表技术集聚区,波谷代表技术空白区,图中每个圆点代表一件專利。其反映出船舶自主航行技术热点主要集中在“预警系统、辅助决策、船舶姿态、卫星导航系统、深度学习、卷尺神经网络、航迹跟踪、环境感知等”,这些高频关键词提示研究机构可以重点关注的研发方向。
结合专利热点地图波峰关键词及其上专利的深度阅读,可以得到以下热点研发方向:
深度学习与避碰决策:基于深度学习的避碰决策系统利用神经网络记忆经过大量数据训练后的样本形成的经验和模型,并在避碰过程中使用这些经验和模型[3]。以专利CN112180950A、CN112185171A等为例,二者通过分别通过建立融合LSTM和强化学习原理的智能船避碰模型,以及构建将船员在驾驶航行数据的深度学习网络模型,优化机器避碰、路径规划策略。深度学习技术的引入使避碰决策的推理能力和求解能力更强。
(2)证据理论与数据融合:以专利CN112101558A、CN112394726A等为例,前者基于D‑S证据理论将空间碰撞危险度和时间碰撞危险度合成得到碰撞危险度来完成态势感知;后者基于证据理论借助传感器的多源异构检测数据实现无人船障碍物的融合检测。证据理论对于船舶态势传感器数据的分析处理收敛速度快、融合结果好,在船舶传感器数据融合中正在被深入运用。
(3)数字孪生与态势感知:数字孪生是对物理实体对象的特征、行为、形成过程和性能等进行描述和建模的过程和方法[4]。专利CN111881515A提出了物理空间不同布置位置和不同量程范围的实体无人艇传感器时间序列数据与信息空间虚拟孪生体三维模型空间数据的实时、跨域、时空融合方法,实现无人艇任意测点位姿观测和可靠估计。数字孪生模型的实时仿真、推演、预测、决策,作为认知计算的关键技术之一,有广泛的应用前景。
3 我国产业发展对策建议
3.1重视核心专利布局,塑造国际化标准体系
2019年工信部装备工业司组织编制《智能船舶标准体系建设指南(征求意见稿)》,从产业政策导向上看,是要把我国智能船舶业发展成国际化标准体系的领导者,而掌握国际化标准体系首先要掌握核心技术的话语权,这离不开在核心关键技术领域的专利布局。目前我国的在各技术类别的研发活跃度均处于领先地位,但是在“高价值专利”占比中远低于美、韩两国,因此研发机构应当更聚焦于产业发展的核心问题,提高专利质量。只有牢牢掌握产业链核心专利,才能掌握产业链的话语权。
3.2强化PCT国际专利布局,拓宽海外市场
从技术来源国的专利布局来看,中国、美国和韩国既是船舶自主航行关键技术的重要国际市场地,也是重要的技术创新和技术来源地。这说明各国在船舶自主航行关键技术领域的国际市场竞争十分激烈,这更体现出国际专利布局的重要性。基于专利保护的地域性以及智能船舶发展的广阔前景,强化PCT国际专利布局,将能够帮助企业抢占市场先机和拓宽海外市场。
3.3加大政策扶持和引导,打造智能航运業
从航运整个产业链的发展来看,在人力成本、环境保护等各方面的压力下,也在倒逼该产业的创新与进步,而且《中国制造2025》和工业4.0也启示传统工业的数字化转型是大势所趋。航运业作为世界经济的“血液”通道,掌握智能化航运技术能够在航运产业取得显著优势,因此在《中国制造2025》提出的发展高技术船舶的基础上,加大并细化诸如自主航行技术的政策支持和引导,能够进一步促进我国智能航运业的发展。
3.4加快技术产业化进程,培育优势企业
总体来看,船舶自主航行关键技术还处于产业化初级阶段,该技术领域的优势企业并不十分突出。而具体到在该技术领域的国际竞争中,最终落脚点还在于企业之间的竞争,因此加快船舶自主航行技术的产业化进程,将技术与产业实践紧密联系起来,形成规模化效应,既能够促进该技术的进一步发展,也是催生和培育发展智能航运优势企业的重要途径之一。
参考文献:
[1] 苏士斌,刘英策,林洪山,等.无人驾驶运输船发展现状与关键技术[J].船海工程,2018,47(05):56-59.
[2] 严新平.智能船舶的研究现状与发展趋势[J].交通与港航,2016,3(1): 25-28.
[3] 李永杰,张瑞,魏慕恒,等.船舶自主航行关键技术研究现状与展望[J].中国舰船研究,2021,16(01):32-44.
[4] 杨斌,张根保,庾辉,等.基于数字孪生的机械产品运动性能调控方法[J].计算机集成制造系统,2019,25(06):1591-1599.
基金项目:湖北省科技厅项目:知识产权集群管理在湖北省机械制造产业转型升级中的实践与示范研究(20142s0078)。
猜你喜欢
中国新技术新产品(2016年24期)2017-02-05
重庆大学学报(社会科学版)(2016年6期)2017-01-19
合作经济与科技(2017年2期)2017-01-03
科教导刊·电子版(2016年23期)2016-10-31
商(2016年29期)2016-10-29
科教导刊·电子版(2016年20期)2016-10-20
科技视界(2016年24期)2016-10-11
科教导刊·电子版(2016年6期)2016-04-19
求知导刊(2016年1期)2016-02-18
无线互联科技(2015年3期)2015-04-13