
千瓦级离子电推进子系统初样研制
2022-02-12 09:46田粉霞冯玮玮王祥龙王国昱
真空与低温 2022年1期
王 亮,耿 海,田粉霞,冯玮玮,王祥龙,王国昱
(兰州空间技术物理研究所 真空技术与物理重点实验室,兰州 730000)
0 引言
为了减轻卫星发射质量、提高卫星承载能力、延长卫星工作寿命,必须采用先进的电推进系统进行卫星全寿命周期内的南北位保和倾角调整,必要时实现卫星的轨道机动[1-4]。兰州空间技术物理研究所研制的千瓦级离子电推进系统,以成熟度较高的LIPS-200离子推力器为核心,成为高轨任务首选。该电推进系统已在我国DFH-3B平台、DFH-4E平台进行了验证和工程应用[5-7],性能及稳定性满足要求。
本文首先介绍LIPS-200离子电推进子系统的组成构架设计。本着系统最优的原则,将电单机设计为一体化的电源处理与控制单元(PPCU),集成子系统内部所有供电、控制、切换以及遥测遥控功能,简化接口复杂性及线缆数量。该单机是目前本所最大的PPCU产品。其次,介绍系统初样设计,包括通常的功能性能设计,以及双发点火、推力闭环、降功率、故障检测隔离恢复(FDIR)等特有功能设计。再对子系统产品的可靠性进行验证,包括力热环境适应性,并针对电推进应用对卫星引入的额外兼容性风险,通过专项试验重点验证EMC和羽流的影响。最后,通过系统联试验证系统性能、匹配性以及自主控制能力,包括系统自主工作、单步工作、故障检测和处理等。
1 子系统组成构架设计
1.1 系统任务需求
离子电推进子系统的主要任务和功能为:
(1)位置保持。卫星在轨期间,2台离子推力器同时工作,完成卫星的8年南北位置保持任务,一轨一次,一次不大于2 h,总时长不大于5 840 h。
(2)倾角调整。在升交点或降交点调整卫星倾角,2台离子推力器同时工作,总时长不大于2 100 h。
工作期间,由星上综合电子系统提供100 V母线,由姿轨控计算机AOCC控制PPCU通断电。PPCU接受系统开关机指令后,自主按照程序流程完成对FCM阀门、热节流器温度闭环及推力器各路供电的控制、故障判断和处理等,实现子系统的推力输出。
1.2 硬件组成及功能
离子电推进系统由2台LIPS-200离子推力器(LIPS-200A、LIPS-200B)、1台电源处理与控制单元(PPCU)、2台流量调节模块(FCM)和1套管路线缆总装件构成,系统组成如图1所示。
(1)离子推力器功能。在贮供单元和电源处理单元供气、供电配合下,将进入推力器的推进工质(氙气)电离,并利用电场加速产生推力。
(2)PPCU功能。实现了控制单机、供电单机和切换单机集成化、最优小型化设计,融合三类单机功能于一体,包括将100 V母线转换为离子推力器所需的9路供电、系统控制与通信、供电切换等功能。
(3)FCM功能。FCM是贮供子系统的一部分,可以控制离子推力器所需三路供气的流量。
PPCU将DICM、PPM、TSU、FCC集成为一体,简化接口实现系统优化设计。特别通过FDIR设计,在系统层面,明确了不同故障模式的处理策略,形成了初步设计规范。对于常规阈值故障,由软件承担故障处理,比如阳极电压超限等;对于必须快速响应的故障,则由PPCU硬件承担,如中和器熄弧保护(≤6 ms)等;还有一类故障需要硬件和软件共同介入,比如打火保护等。

图1 离子电推进系统组成框图Fig.1 The block diagram of ion electric propulsion system
1.3 软件组成
PPCU内部的DICM作为离子推力器系统的控制中心,配置有1个软件配置项(80C32 CPU),2个现场可编程门阵列(FPGA)配置项,分别为驱动FPGA和采集FPGA,负责完成离子电推进系统开关机指令的接收,对2台离子推力器供电、供气的综合控制,状态监测,在轨自主完成电推进系统点火工作、关机、故障判断和应急处理。由主控软件实时判断系统的点火进展情况并进行故障处理,比如阈值上下限和放电室熄弧关机;无须实时判断的故障处理由FDIR软件完成,比如烧蚀和大电流点火等。离子电推进系统软件组成如图2所示。

图2 离子电推进系统软件组成框图Fig.2 The software block diagram of ion electric propulsion system
2 子系统初样设计
2.1 子系统主要性能参数
子系统主要性能参数如表1所列。

表1 离子电推进子系统主要性能参数Tab.1 The major characteristic parameters of ion electric propulsion system
2.2 系统工作模式
子系统工作模式由待机模式、气路预处理模式、阴极和中和器预处理模式、放电室预处理模式、栅极预处理模式、单步运行模式和自主运行模式组成。当PPCU主控软件接收到电推进控制器从1553B总线发送的工作模式切换指令时,依据指令内容,对系统工作模式进行切换,工作模式转换图如图3所示。

图3 子系统工作模式转换图Fig.3 The diagram of subsystem works mode transition
待机模式是离子电推进子系统工作的起点,该模式下系统响应切换类指令及设置类指令,进行模式切换及系统设置,上传遥测数据至上位机。目前,离子电推进系统最小遥控指令集已形成规范,包括设置类指令25条,注数类指令22条,形成了兰州空间技术物理研究所离子电推进系统控制软件设计范本。
为了满足离子电推进子系统点火过程的加电顺序及时间要求,PPCU的各路供电及驱动模块须满足一定的时序关系。图4是在正常加电情况下PPCU加电时序图。

图4 PPCU加电时序图Fig.4 The operation sequence diagrams of PPCU
2.3 FDIR设计
长时间自主运行是电推进系统工作特点,因而,FDIR设计成为电推进系统设计的重点和难点。基于对系统的深入理解及应用经验。将故障处理功能分解到硬件、主控软件、FDIR软件三个层面,实现了故障冗余与恢复最优分配。监测相应的参数来完成故障检测,产生相应的FDIR报警,并由指令序列恢复相应的故障,从而达到对星上故障自主、实时处理的目的。离子电推进子系统FDIR功能如表2所列。
2.4 离子推力器设计
离子推力器产品设计完全继承AP-6D型号产品,仅对安装接口做适应性更改。该产品已经过14 649 h/7 171次开关机地面试验[8],满足累计工作8 000 h,开关机次数大于4 000次的需求。
离子推力器主要由阴极、放电室、栅极组件、气路电绝缘器、中和器、工质气路、外壳组成,其外形如图5所示。离子推力器的关键部组件的设计方案如下:
(1)放电室
放电室为柱形磁铁环尖磁场,直、锥双阳极带中间屏极。该放电室中原初电子的主要电离区域集中在阳极筒表面边沿,并通过径向磁场来约束出口区域的径向电位分布,加强正离子向出口径向边缘的扩散,以此改善束流均匀性,提高栅极寿命;强化边沿区域的电离效率,减少双荷离子及其溅射影响;降低对磁铁的温度性能和抗衰减性能的要求[9-10]。

表2 FDIR功能列表Tab.2 The feature list of FDIR

图5 推力器外形图Fig.5 The appearance of ion thruster
(2)阴极和中和器
中和器采用技术成熟的六硼化镧发射体作为空心阴极。与其他发射体材料相比,六硼化镧的主要优点是发射电流密度高、抗离子轰击能力强、抗中毒能力强,在推力器储存、运输及与航天器联合测试暴露大气时不会中毒,可以长期在空气中存放[11]。
(3)栅极组件
栅极组件用于支撑环凸面钼栅极和双栅离子光学系统,质量和可靠性满足指标要求[12]。
(4)气路电绝缘器
气路电绝缘器依靠多层金属网分电压抑制气体放电。该绝缘器利用电势叠加的原理,将高电压进行分割实现绝缘,即在两极间插入一系列的电极,使各电极间的电压之和等于所加高压,并且各极间电压都低于气体击穿所需要的最低电压。从而将高压绝缘问题转化为低压绝缘问题[13]。
推力器额定性能(100%)参数及降功率性能(80%、60%)参数如表3所列。
2.5 电源处理与控制单元设计
为满足可靠性备份和重量参数最优等需求,子系统只配置1台电源处理与控制单元(PPCU),同时为2台推力器供电。PPCU采用一体化设计,集供电、控制、通讯功能于一体。PPCU的总体电路主要包括五部分:母线开关控制、数字接口与控制、供电模块、流量控制和对外接口模块,总输出功率约为2 000 W,考虑备份冗余功能和系统可靠性,配置方案如图6所示。正常工作时,PPM-A与PPM-C分别为推力器1、2供电,如果PPM-A或PPM-C中任意1台出现故障,则以PPM-B为相应推力器供电。DICM、FCU均采用冷态主备份方案。

表3 离子推力器主要性能参数及额定值Tab.3 Main performance parameters and rated value of ion thruster
(1)母线开关控制
母线开关包括母线安全开关和控制开关电路,可以控制PPCU加断电。由于输入总功率需求达2 370 W,输入电流达24 A,对消浪涌电路和滤波电路要求较高,必须利用金属氧化物场效应管(MOSFET)的缓慢导通来抑制母线的输入电流浪涌,MOSFET同时作为PPCU的母线接通与关断的控制开关。
(2)供电模块
供电模块由3个功能特性完全相同的电源处理模块(PPM)组成,以避免出现故障单点。单个PPM包括功能完备的屏栅、加速栅电源和多路稳流源及点火电源,满足1台推力器的供电需求。每台推力器所需电源为9路,供电连接关系如图7所示。屏栅电源模块采用谐振电路全桥变换器技术,实现了高效率、轻量化的目标。DC/AC多路稳流可通过功率码连续调节,束流闭环通过调节阳极电流实现。
(3)数字接口与控制
数字接口与控制配置2个功能特性完全相同的DICM模块实现冷备份功能,并通过2条1553B总线与电推进控制器进行通信。如果DICM-A模块失效,通过OC开关控制指令,用备份DICM-B模块控制PPCU内部各功率模块、切换继电器(TSU)和流量调节模块(FCU)。采用3D叠层封装MRAM存储器实现数据的存储及读取功能。
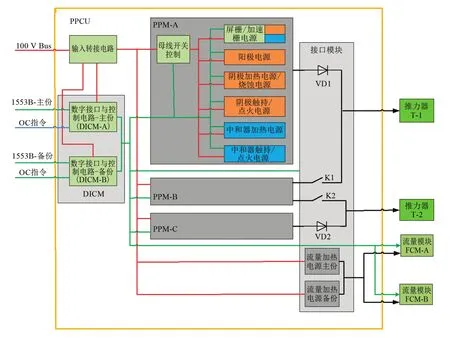
图6 PPCU组成框图Fig.6 The block diagram of PPCU

图7 PPM各路电源与推力器供电连接关系Fig.7 The connection relationship of PPM circuits
(4)流量控制
流量控制主要负责为推力器流量模块供电、提供阀门驱动信号、对热节流器温度进行闭环控制,并采集各种遥测信号。
(5)对外接口模块
对外接口模块主要完成每个PPM输出线的对接、PPM的切换以及最终向推力器的输出,共使用16只高压继电器完成备份PPM-B的供电切换功能,模块的高压部分必须进行灌封处理。
采用隔框式设计对PPCU进行电磁干扰屏蔽,产品外形图及主要性能参数如图8所示和表4所列。

图8 PPCU外形图Fig.8 The PPCU’s outside drawing

表4 PPCU主要性能参数Tab.4 Main performance parameters of PPCU
2.6 流量调节模块
流量调节模块由2个自锁阀、3个热节流器、1个测量及控制信号电连接器和管路等组成,各零部件与管路全部采用管焊连接。自锁阀为流量调节模块入口,输出推力器所需的流量,其作用为开启与关闭整个流量调节模块;热节流器用于控制推进剂的流量,通过对热节流器线圈通电,使热节流器的温度达到工作温度,实现氙气流量的控制。流量调节模块原理组成框图如图9所示。性能参数如表5所列。

图9 FCM结构及原理图Fig.9 The structure and schematic diagram fo FCM

表5 FCM主要性能参数Tab.5 Main performance parameters of FCM
3 可靠性验证
3.1 力学环境试验
为了验证力学环境适应性,对离子推力器、PPCU、FCM三台单机分别进行了鉴定级抗力学试验考核,包括正弦振动、随机振动、冲击、加速度试验。试验结果表明,试验后各单机结构均无异常,推力器特征阻值测试正常,试验前后子系统点火电气参数一致。
3.2 热环境试验
离子电推进子系统各单机热环境试验汇总情况如表6所列,热环境适应性满足设计要求。

表6 各单机热环境试验项目汇总Tab.6 The summary sheet of single machine thermal environment tests
3.3 EMC专项试验
开展了推力器和PPCU的联合EMC试验,包括电场辐射发射(RE102)测试、瞬态电场辐射发射测试以及电源线尖峰信号传导发射(CE107)测试。结果表明,离子电推进系统电磁兼容性良好,大多数频段满足整星EMC要求,未发现严重超标频段,超标频段在1 GHz以下,不影响整星通信载荷在L频段、C频段、Ku频段以及Ka频段的正常工作。图10给出部分EMC测试曲线,(a)为辐射发射RE102测试(0.01~30 MHz);(b)为辐射发射RE102测试(200~1 000 MHz);(c)为瞬态频域测试(20~200 MHz)。图中的纵坐标进行了归一化处理。

图10 PPCU+推力器EMC测试曲线Fig.10 The EMC test curve of PPCU and thruster
3.4 羽流专项试验
采用单Faraday探针测量离子推力器羽流场束电流密度分布,通过三维移动机构在近场(0~1 m)区域移动得到一系列束流密度分布曲线,如图11所示。图12为Faraday探针分别在4组X坐标下沿Y轴移动得到的束电流密度分布曲线;图13为Faraday探针分别在5组X坐标下沿Z轴移动得到的束电流密度分布曲线。利用不同X坐标下的束流密度曲线可以计算得到该X坐标下的发散角,通过相同X坐标下束流峰值的[Y,Z]坐标可以计算得到推力偏角。

图11 推力器羽流测量坐标Fig.11 Thruster plume measurement coordinates

图12 不同X坐标沿Y轴束流密度分布Fig.12 Beam density distribution along Y axis in different X coordinates

图13 不同X坐标沿Z轴束流密度分布Fig.13 Beam density distribution along Z axis in different X coordinates
测试计算表明,LIPS-200离子推力器发散角(90%束流)全角为28.98°~29.1°,推力偏角为0.86°~0.96°,发散角和偏角在近场区域内对X距离变化不敏感,均满足要求。
4 子系统联试
系统联试遵循先易后难,先局部后整体的原则分三个阶段进行,第一阶段桌面联试,测试软硬件匹配性,重点在节点定义、软件功能、硬件响应等;第二阶段真实推力器短期点火,仅将推力器置于真空环境下,重点测试性能参数的实现性;第三阶段可靠性测试,将全系统置于真空环境下,重点测试拉偏性能,以及长时间性能波动。试验流程如图14所示。

图14 子系统联试流程图Fig.14 The flow chart of subsystem united test
4.1 联试状态
子系统各单机连接关系如图15所示。试验在TS-7设备中进行,主要进行千瓦级推力器的长寿命考核试验及系统可靠性验证试验,图16为吊装在TS-7设备内准备进行双发点火的两台推力器,设备主要性能如表7所列。

图15 子系统联试连接状态Fig.15 The connection status of subsystem united test

图16 吊装在TS-7设备内准备进行双发点火的两台推力器Fig.16 Two thrusters are hoisted into the TS-7 facility for a couple ignition

表7 TS-7主要性能参数Tab.7 Main performance parameters of the TS-7 vacuum equipment
4.2 主要联试结果
对两台推力器分别选择不同的PPM供电,完成100%、80%、60%功率模式联试性能测试。图17显示不同功率模式下的屏栅电压与屏栅电流曲线,该参数直接反映推力大小。从图17可以看出,100%功率模式下工作5 h无束流闪烁,80%模式下工作2 h中发生1次束流闪烁,60%模式下工作2 h中发生1次束流闪烁,子系统性能满足要求,工作稳定。

图17 不同模式下不同时间的屏栅电压和屏栅电流值Fig.17 Screen-grid voltage and current in different power mode at different time
5 结论
通过千瓦级离子电推进子系统初样设计及验证,完成了系统构型最优化分解,实现了所有功能和性能指标,重点实现了双发点火、推力闭环控制、降功率工作等特色功能,提升了系统易用性。在FDIR设计方面,系统梳理了8项典型故障处理功能,并按工程实际分为3类,提高了电推进系统完成任务的能力及规范性。
通过该子系统研制,在系统构架优化,软硬件设计规范,系统验证流程等方面积累了经验。后续,还须加强对离子推力器系统的易用性、自主运行管理技术、空间长期工作性能衰退以及与航天器的相容性的研究和积累,进一步提升系统产品可靠性、易用性及成熟度。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
原子能科学技术(2022年9期)2022-10-10
原子能科学技术(2022年9期)2022-10-10
焊接学报(2022年8期)2022-09-28
白城师范学院学报(2021年2期)2021-05-06
空间控制技术与应用(2021年1期)2021-04-25
军民两用技术与产品(2021年10期)2021-03-16
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2020年11期)2020-02-07
航天器工程(2019年1期)2019-03-06
