结合混合符号压力函数的活动轮廓模型
2022-02-18 06:44郑婕唐利明
数据采集与处理 2022年1期
郑婕,唐利明
(1.湖北民族大学数学与统计学院,恩施 445000;2.湖北民族大学附属民大医院,恩施 445000)
引 言
图像分割指的是把特定的、感兴趣的目标区域从背景分离出去的过程。它是图像理解和图像分析研究的基础技术和关键步骤。在众多的图像分割模型中,活动轮廓模型(Active contour model,ACM)由于坚实的理论基础和良好的实验效果受到了学者的广泛关注和研究。
ACM根据其自身特点可分为边缘信息模型[1⁃6]和区域信息模型[7⁃14]。基于边缘的模型将图像梯度信息作为约束,构造一个边缘停止函数,使活动轮廓停止在图像梯度值大的区域,即在目标物体的边界上实现图像分割。最具代表的基于边缘的模型是由Caselleles等[1]提出的测地活动轮廓模型(Geodesic active contour,GAC)。该模型通过极小化基于图像梯度信息的测地弧长实现活动轮廓演化,得到分割结果。GAC模型可以很好地分割目标边界清晰、对比度大的图像。但由于该模型仅依靠图像梯度信息驱动活动轮廓演化,因此对含有模糊边缘和噪声的图像不能准确分割。
基于区域的模型利用轮廓内外的区域灰度信息作为约束,驱使活动轮廓运动到目标物体边界上。例如,Chan和Vese[9]提出的无边缘的活动轮廓模型(Chan⁃Vese,CV),利用轮廓内外的区域灰度均值差驱动活动轮廓演化,实现图像分割;Zhang等[10]结合CV和GAC模型,通过定义一个符号压力函数,提出了具有选择性局部全局分割活动轮廓模型(Selective local or global segmentation,SLGS),相对于CV模型,SLGS具有较高的分割效率。CV和SLGS模型可以高效地分割灰度均匀、对比度较大的图像,并且由于采用图像的全局信息,所以初始轮廓的位置改变并不影响分割效果,并对噪声有一定的鲁棒性。但是上述全局模型将图像建模为均匀的二值图像,因此对灰度不均图像不能准确分割。
为了解决全局模型的这个缺点,提高分割灰度不均图像的能力,学者们提出了基于图像局部信息的活动轮廓模型[11⁃14]。例如Li等[12]提出局部二值拟合模型(Local binary fitting,LBF),该模型在图像的局部区域中用不同均值的高斯分布拟合活动轮廓内外的灰度值。LBF模型可以很好地捕捉图像灰度的局部变化,因此可以较好地分割灰度不均图像。Zhang等[13]为了提高分割效率,提出了局部图像拟合模型(Local image fitting,LIF),该模型通过找寻最优的局部拟合图像以实现图像分割。为了更精细地进行图像建模,Wang等[14]提出了局部高斯拟合模型(Local Gaussian distribution fitting energy,LGDF)。相对于传统的LBF模型,LGDF模型在局部区域中采用变化均值和方差的高斯分布拟合图像,可以更精准地捕获灰度的局部变化。上述模型都是在图像的局部区域内建模,所以它们对初始轮廓和噪声都比较敏感。
为了吸取局部和全局模型的优点并摒弃各自的缺点,一些混合活动轮廓模型被相继提出[15⁃17],例如Shi等[16]提出结合全局信息和局部信息的混合模型,结合全局和局部拟合能量,能较好地分割灰度不均匀图像,并且对初始轮廓和噪声具有一定的鲁棒性。但是现有的混合模型基本都是将一个局部模型和一个全局模型进行简单的线性组合。该方法虽然使得模型同时具有局部和全局模型的优点,但是大大增加了模型的复杂度,降低了分割效率。为了提高分割效率,提出一些改进的复合模型,例如Han等[18]提出了全局和局部加权符号压力混合活动轮廓模型(Global and local weighted signed pressure force,GL⁃SPF);Fang等[19]提出加权混合符号压力(Weighted hybrid region⁃based signed pressure force,WHRSPF)活动轮廓模型;Liu等[20]提出混合局部全局符号压力(Global and local signed energy⁃based pressure force,GLSEPF)活动轮廓模型。上述模型都是结合符号压力函数的混合模型,较好地继承了符号压力函数和混合模型的优点,能够高效地分割灰度不均匀图像,并且有一定抗噪能力。
本文借鉴SLGS模型[10]的思想,提出了一个新的结合混合符号压力函数的活动轮廓模型。首先,综合图像的全局和局部信息,根据当前活动轮廓的位置,构造一个混合符号压力函数,该函数通过自适应权值线性组合一个全局压力项和一个局部压力项,根据图像的全局和局部信息自动调节全局压力项和局部压力项比重,得到图像相对于当前活动轮廓的混合符号压力。然后结合此混合符号压力函数,构造活动轮廓的演化方程,其中混合符号压力函数的符号决定活动轮廓的运动方向,而函数值大小决定活动轮廓的运动速度,最后采用交替迭代算法对模型进行求解。该模型结合全局模型和局部模型的优点,可以分割灰度不均图像,并且对初始轮廓和噪声有较强的鲁棒性。
1 基于符号压力函数的相关模型
Zhang等[10]利用图像信息和演化曲线,构造了一个符号压力函数(Signed pressure function,SPF),并结合CV模型[9]和GAC模型[1],提出了SLGS模型,其符号压力函数定义为

式中:I(x)为输入图像;Ω为图像区域;c1和c2分别为活动轮廓内部和外部的灰度均值,计算公式为

为避免每次迭代时水平集函数重新初始化的过程,通过利用高斯滤波器对水平集函数正则化处理,因此可以忽略曲率项。利用符号压力函数,Zhang等[10]定义了如下的演化方程

式中:α>0为演化速度调节参数;φ为水平集函数。符号压力函数能够根据活动轮廓内部和外部区域的图像灰度值大小调节演化曲线的运动方向,当活动轮廓在分割目标外部时,符号压力函数引导演化曲线收缩;当活动轮廓在分割目标内部时,符号压力函数引导演化曲线扩张。SLGS模型能较好地分割模糊边界图像,避免边界泄露现象,相对于CV等模型,大大提高了分割效率。但该模型同样假设图像由2个同质区域组成,对灰度不均图像不能准确分割,并且其分割效果受初始轮廓位置和大小影响较为明显。
为准确分割灰度不均图像,对SLGS模型进行改进,引入图像局部信息,提出了基于SLGS模型的混合模型[18⁃20]。其中,Fang等[19]提出了WHRSPF模型,其符号压力函数由自适应全局符号压力项和自适应局部压力项组成,其演化方程和符号压力函数定义为

式中:αHR为力传播函数;wg和wl为全局和局部加权变量;wg1和wg2,wl1和wl2分别为根据归一化全局像素点数和归一化局部像素值设置的权值常数;m为内部区域灰度值中值;f1和f2分别为活动轮廓内部区域和外部区域的局部灰度拟合函数,计算公式为

Liu等[20]提出的GLSEPF模型不同于上述模型。GLSEPF模型并没有将全局信息和局部信息直接组合成一个混合符号压力函数,而是分别构成全局符号压力函数和局部符号压力函数,最后通过自适应权值将2项组成最终模型,其演化方程、全局和局部符号压力函数定义为

式中:μ>0,ν>0分别为长度项和面积项常系数;δε(φ)为正则化的Dirac函数定义为

H(φ)为正则化的Heaviside函数导数,定义为

式中ε为设定参数。全局符号压力函数和局部符号压力函数定义为
式中α1和α2为全局和局部符号压力函数中的力传播函数。
上述模型都是基于符号压力函数的活动轮廓模型。和传统的变分水平集活动轮廓模型不同的是,此类模型都是通过定义一个符号压力函数为活动轮廓的演化速度,直接建模活动轮廓的演化方程(偏微分方程),而变分水平集活动轮廓模型是首先建立包含活动轮廓和图像的能量泛函,然后通过变分极小化算法得到活动轮廓的演化方程。相对于传统的变分水平集活动轮廓模型,基于符号压力函数的活动轮廓模型建模更为直观,并且具有较高的计算效率。
2 本文模型
正如前文介绍,CV模型仅利用图像中的全局信息,不易受初始轮廓和噪声的影响,但图像存在灰度不均情况时处理效果不好,且计算量大;SLGS模型虽在CV模型上提高了分割效率,但灰度不均图像和噪声图像分割质量不高;LBF模型能有效分割灰度不均图像,但对局部信息过于依赖,易受初始轮廓和噪声影响。基于上述分析,避免其缺点,本文提出了一个结合混合符号压力函数的活动轮廓模型(Active contour combining with hybrid signed pressure function,AC⁃HSPF)。
首先根据当前水平集函数,结合图像全局信息和局部信息,通过自适应权值线性组合得到一个混合拟合项。然后,基于此混合拟合项,构造一个新的混合符号压力函数为

式中ω为权重系数,控制全局信息和局部信息比重大小,其值根据图像特征进行调整。本文采用文献[20]中的方法设计权重参数ω,定义为

式中和是输入图像I(x)的全局方差和局部方差,其定义为

式中Nl表示局部区域Ωx的像素点个数,权重系数0≤ω≤1。对于严重灰度不均的图像,局部方差大于全局方差,ω数值较大,局部信息比重大,全局信息比重小,局部压力占主导地位;相反对于均匀同质或者噪声图像,ω数值较小,局部信息比重小,全局信息比重大,全局压力占主导地位。
利用混合符号压力函式(12),构造如下演化方程模型实现图像分割,即有

混合符号压力函数F(I(x))能够根据活动轮廓内部和外部区域的全局和局部区域灰度均值调节演化曲线的运动。一般有如下两种情况:(1)若输入图像I(x)为近似均匀的二值图像时,全局方差大于局部方差,ω数值较小,全局压力占主导作用。当活动轮廓在分割目标外部时,符号压力函数为正值,引导其收缩;当活动轮廓在分割目标内部时,符号压力函数为负值,引导其扩张,从而使得活动轮廓运动到目标的边界。(2)若输入图像I(x)为灰度不均图像时,此时若仅仅采用全局压力,会使得目标轮廓停留在灰度不均的位置而产生误分割。这种情况下,局部方差大于全局方差,ω数值较大,局部压力占主导地位,灰度不均会导致局部区域产生压力,此种压力会引导活动轮廓穿过灰度不均区域,到达正确的目标边界。
本文模型是基于符号压力函数的活动轮廓模型,和已有的模型(例如SLGS模型、WHRSPF模型和GLSEPF模型)有如下不同:
(1)模型结构上,WHRSPF模型和GLSEPF模型通过调节速度传播函数α(I(x))获得活动轮廓运动速度,根据图像特征计算符号压力函数值控制活动轮廓运动方向。本文模型通过图像特征计算得到的符号压力函数,可同时获得轮廓运动的速度和方向,避免了速度参数的使用,降低了模型复杂度。
(2)演化方程中,SLGS模型、WHRSPF模型及GLSEPF模型均采用|∇φ|。本文模型采用正则化δε(φ)而不是|∇φ|,目的是为了获得更稳定的数值计算,同时也增大活动轮廓的捕捉范围,使得模型更稳定。
对于演化方程(15),本文采用有限差分法对其进行数值求解,即

式中 Δt为时间步长。注意差分格式(16)中,混合符号压力函数F(I(x) ) 中包含全局灰度均值c1和c2,以及局部灰度均值f1(x) 和f2(x),而这 4 个值又与水平集函数φ(x) 有关,所以本文采用交替迭代算法进行模型求解,具体算法步骤如下:
步骤 1定义初始化水平集函数φ(x,t= 0 );
步骤 2采用式(13,14)计算ω;
步骤3采用式(2)更新c1(φ)和c2(φ);
步骤4采用式(6)更新f1(φ)和f2(φ);
步骤5采用式(16)演化水平集函数φt+1(x);
步骤6判断是否满足收敛条件其中T=0.01,满足则输出分割结果{x:φ(x)=0},否则返回步骤2。
3 实验结果与分析
本文从以下几个方面评估模型性能:(1)模型对初始轮廓的鲁棒性;(2)对灰度不均图像的分割;(3)对医学图像的分割;(4)对自然图像的分割;(5)对噪声图像的分割;(6)定量化分析。选取CV、LBF、SLGS、WHRSPF和GLEPF模型作为参考对比模型。参数定义如下:初始水平集函数定义为一个分段常值函数,即
式中:ρ>0为常数;C0为一个初始轮廓;ε=1;Δt=10;σ和w∈[0,1]为自适应参数。
3.1 对初始轮廓的鲁棒性
首先验证本文模型对初始轮廓的鲁棒性,实验对象为1幅扳手图像,该图像目标边界清晰,对比度较大,但是包含2个目标物体,并且含有深凹边界和多个内部孔洞,如图1所示。此图像经常被用来作为初始轮廓敏感性分析的测试图像,用分割目标、深凹边界、孔洞的完整性判断模型对初始轮廓的敏感性。若模型对初始轮廓敏感,则不同的初始化可能导致提取不同的目标、边界和孔洞。图1(a)分别展示5种不同的初始轮廓,包含不同的形状、大小和位置等;图1(b)为利用本文模型相应的分割结果。从结果可以看出,设置不同的初始轮廓,本文模型都能准确提取待分割目标,2个目标物体都被完整地提取出来,并且深凹边界和内部的孔洞也被精确地检测出来。

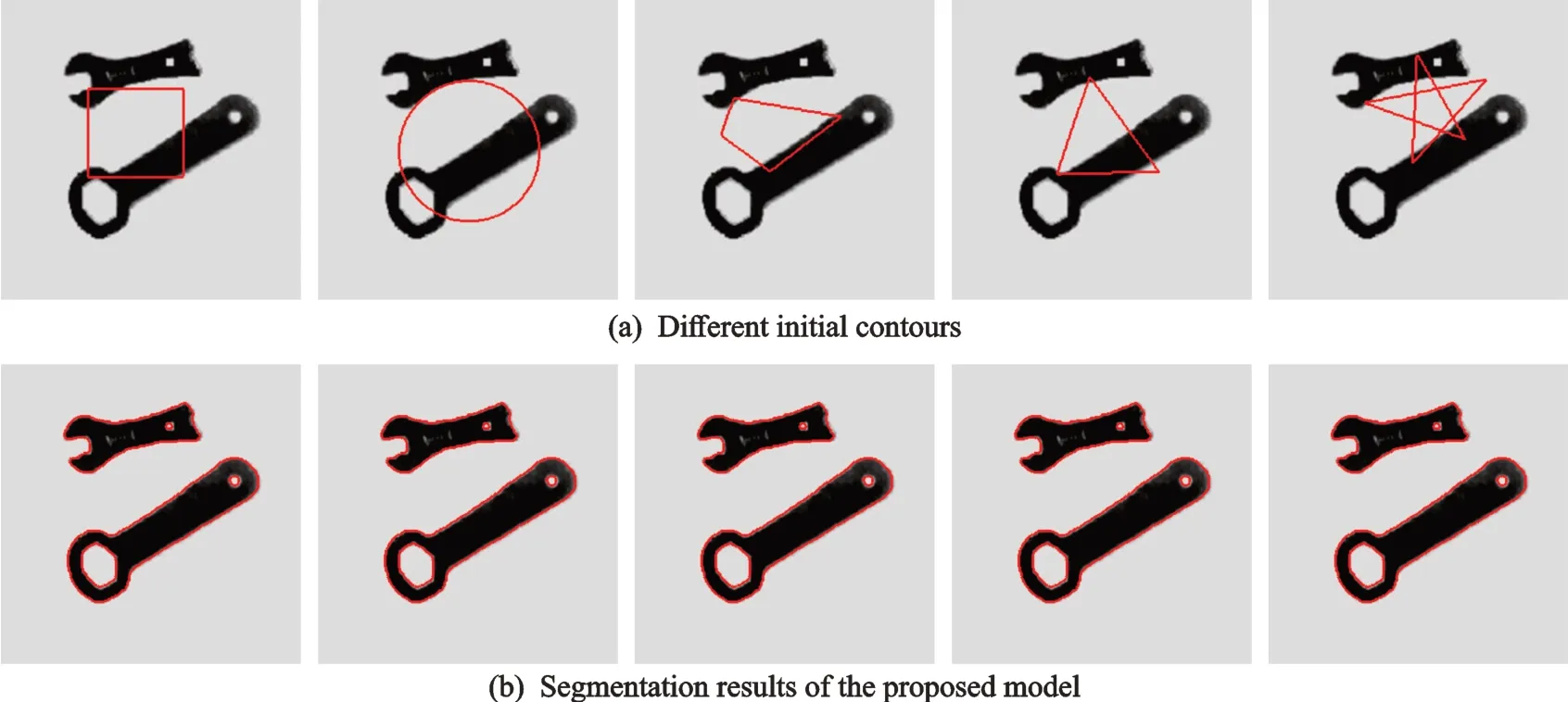
图1 本文模型针对不同初始轮廓的分割结果Fig.1 Segmentation results of the proposed model with different initial contours
3.2 正则化δε(φ)与|∇φ|对比
本节讨论演化方程中使用Dirac函数优势。根据前文介绍,SLGS、WHRSPF及GLSPF模型在演化方程中均采用|∇φ|,而本文模型采用正则化δε(φ)。选取飞机和血管图像进行实验分析,结果如图2所示。其中图2(a)为测试图像;图2(b~d)为演化方程使用正则化Dirac函数分割效果图,其参数ε分别设置为1、3、5;图2(e)为演化方程使用|∇φ|分割效果图。由实验结果可得出,演化方程中正则化Dirac函数参数值ε=1时,目标细节较为突出;ε=3时,图像较ε=1分割范围扩大,但目标细节有损失;ε=5时,分割范围进一步扩大,目标细节较之前损失更大。由于|∇φ|无参数,因此当演化方程使用|∇φ|时无需进行参数调节,分割范围和对细节处理程度较为固定。由此可知,当演化方程使用Dirac函数时,能根据实验图像特征进行参数调整,控制分割范围和目标细节处理程度,更能适用不同图像的分割,提高分割质量。
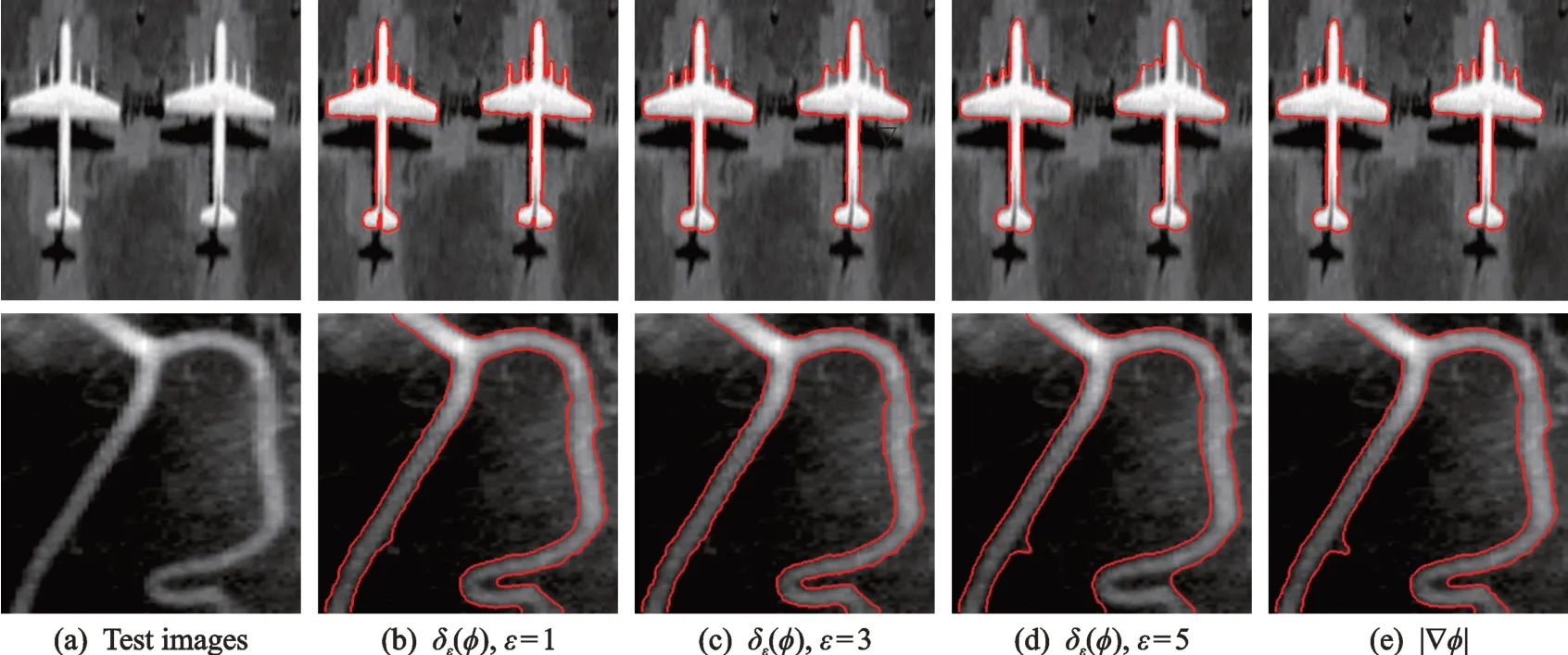
图2 演化方程使用正则化δε(φ)与|∇φ|分割效果Fig.2 Segmentation results of the evolution equation with δε(φ)and|∇φ|
3.3 灰度不均图像的分割
本节测试模型对灰度不均图像的分割效果。测试图像为3幅人工合成图像和2幅自然图像,分割结果见图3,其中图3(a)为测试图像,5幅图像存在明显的灰度不均或弱边界情况;图3(b)展示了初始轮廓;图3(c)为分割结果。从实验结果可以看出,本文模型能很好排除灰度不均的影响,获得精确的分割结果。例如,对于第2幅人造图像,目标物体和背景存在明显的灰度不均,由左到右灰度值由低到高,本文模型能准确地检测到目标物体;对于第5幅汽车红外图像,无论是汽车目标还是背景都包含较为严重的灰度不均,且存在弱边界,本文模型成功排除了灰度不均的干扰,准确地检测到汽车目标轮廓,并且弱边界也被精确地提取出来。
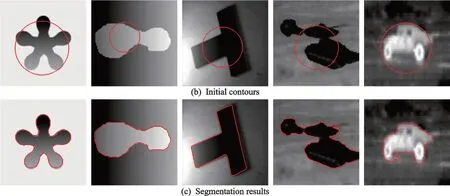
图3 灰度不均图像的分割结果Fig.3 Segmentation results of image with intensity inhomogeneity
3.4 医学图像的分割
本节选取了5幅不同的医学图像(包含超声、MR、造影图像)对模型进行测试,并与其他模型进行对比实验。一般来说,医学图像存在严重的灰度不均、目标复杂且易受成像设备等因素影响易产生噪声。实验结果如图4所示,图4(a)为测试图像,图4(b~g)分别为CV、LBF、SLGS、WHRSPF、GLSEPF模型和本文模型的分割结果。从实验结果可以看出:CV模型假设图像为同质图像,不能处理灰度不均图像,且易受超声图像中噪声干扰;LBF模型虽能分割灰度不均图像,但易受超声图像中噪声干扰,且对初始轮廓敏感,所以分割效果不佳;SLGS模型分割速度较快,但该模型仍只考虑全局信息,对严重灰度不均图像不能准确分割;WHRSPF和GLSEPF模型对于灰度严重不均的图像虽能检测出目标物体,但受背景灰度不均区域的干扰;本文模型结合了局部和全局信息,在局部压力和全局压力共同引导下,活动轮廓能准确地运动到正确的目标边界,精确地提取了目标轮廓。

图4 医学图像的分割结果Fig.4 Segmentation results of medical images
3.5 自然图像的分割
本节选取了3幅自然图像进一步验证模型有效性,并与其他几种经典模型进行对比。这3幅自然图像目标和背景较为复杂,并存在一定程度的灰度不均,实验结果如图5所示。图5(a)为测试图像,图5(b~g)分别为CV、LBF、SLGS、WHRSPF、GLSEPF模型和本文模型的分割结果。从分割结果可以看出:CV模型和SLGS模型仅考虑图像全局信息,对灰度不均图像分割质量不高;而LBF模型仅考虑图像局部信息,对初始轮廓敏感,且分割结果易受细节信息的干扰,产生误分割现象;WHRSPF与GLSEPF模型对灰度严重不均图像不能准确分割;本文模型成功地排除灰度不均、细节信息的干扰,准确地提取到目标轮廓。
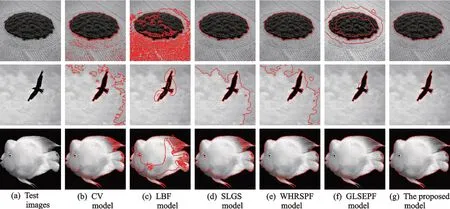
图5 自然图像的分割结果Fig.5 Segmentation results of natural images
3.6 噪声图像的分割
本节验证模型对噪声的鲁棒性。选取了2幅较为简单的高斯噪声人造图像为实验对象。实验结果如图6所示,从上到下依次展示了加入方差为0.01、0.1和0.2的高斯噪声图像及分割结果。其中,图6(a,d)为测试噪声图像,图6(b,e)为初始轮廓,图6(c,f)为分割结果。从实验结果可以看出本文模型对不同程度高斯噪声有鲁棒性,可以准确地提取目标轮廓。
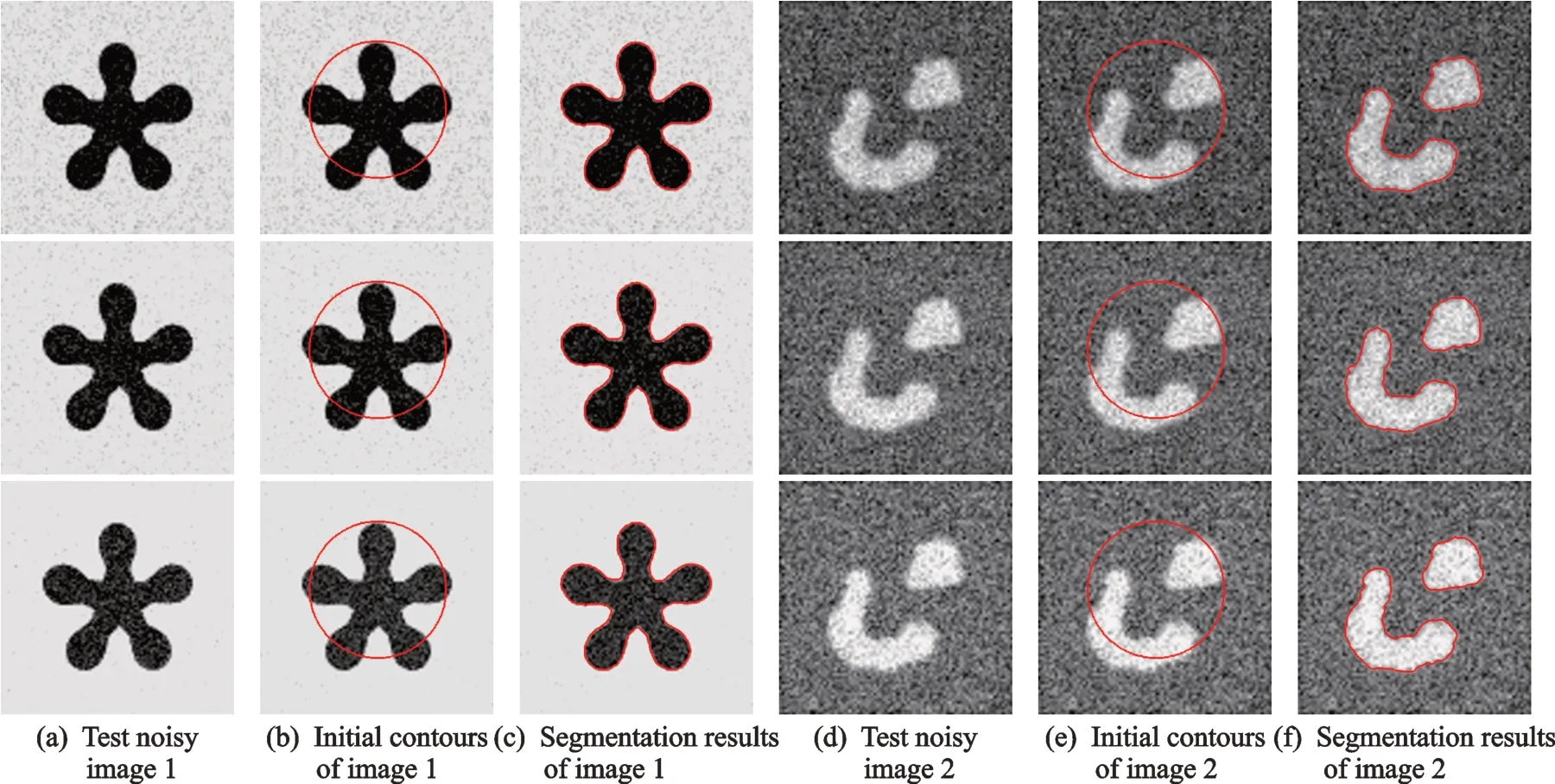
图6 对高斯噪声图像的分割结果Fig.6 Segmentation results of image with Gaussian noise
与其他几种经典模型进行噪声图像分割效果对比。图7展示了不同模型对3幅方差为0.01的高斯噪声图像的分割结果,图7(a)为测试图像,图7(b~g)分别为CV、LBF、SLGS、WHRSPF、GLSEPF模型及本文模型分割结果。从分割效果看:CV模型和LBF模型易受噪声干扰;SLGS、WHRSPF和GLSEPF模型有一定的抗噪能力;本文模型抗噪性最强,可以准确地提取到目标轮廓。
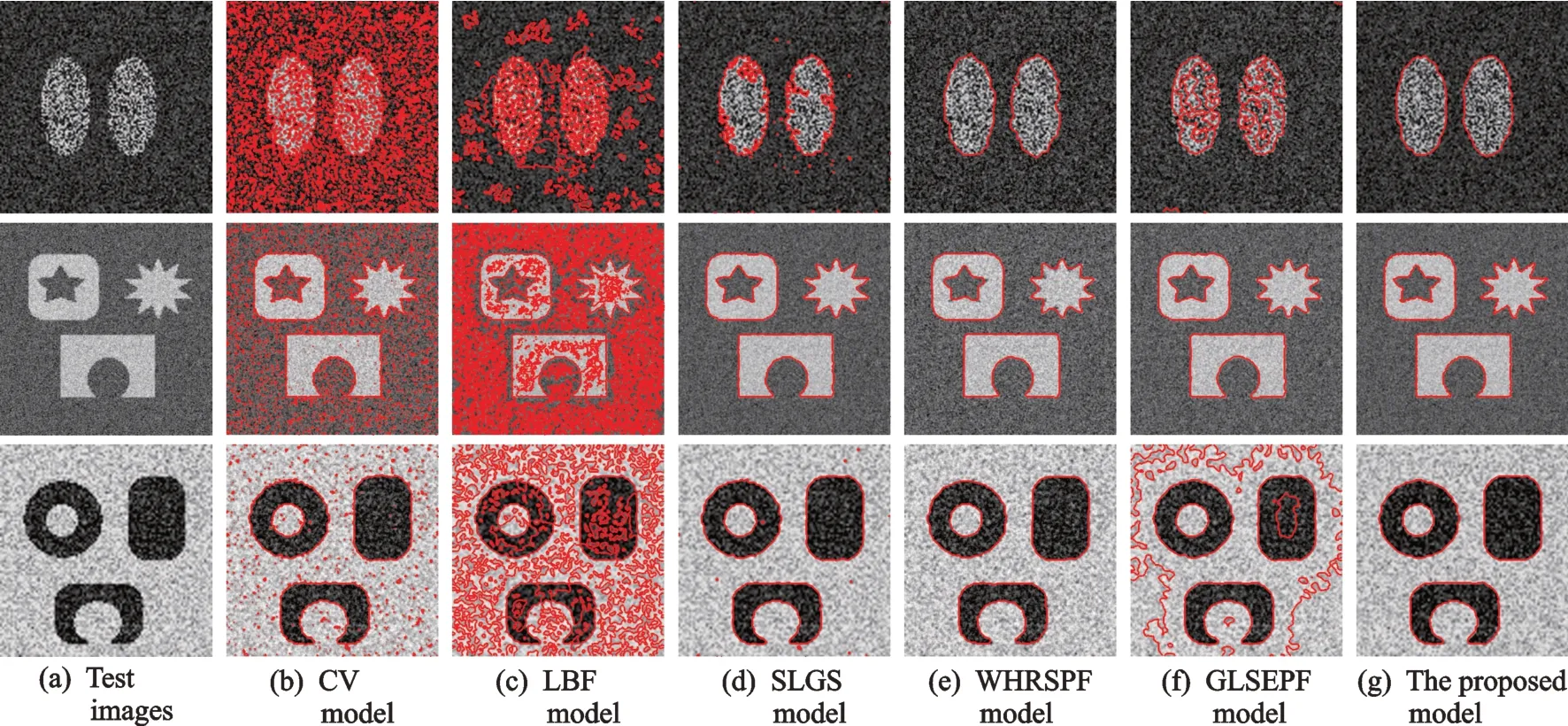
图7 不同模型的噪声图像分割对比结果Fig.7 Comparison of segmentation results of noisy images by different models
图8中通过对图像分别添加4种不同类型噪声(椒盐、高斯、泊松和光斑噪声)来验证模型对不同种类噪声的鲁棒性。图8(a)为测试的噪声图像,从左至右图像中分别添加椒盐噪声(0.01)、高斯噪声(均值0,方差0.01)、泊松噪声和光斑噪声(均值0,方差0.01);图8(b)为不同噪声图像的初始轮廓;图8(c)为不同噪声图像的分割结果。从分割结果可以发现,本文模型能较好地处理4种不同的噪声图像,得到准确的分割结果。
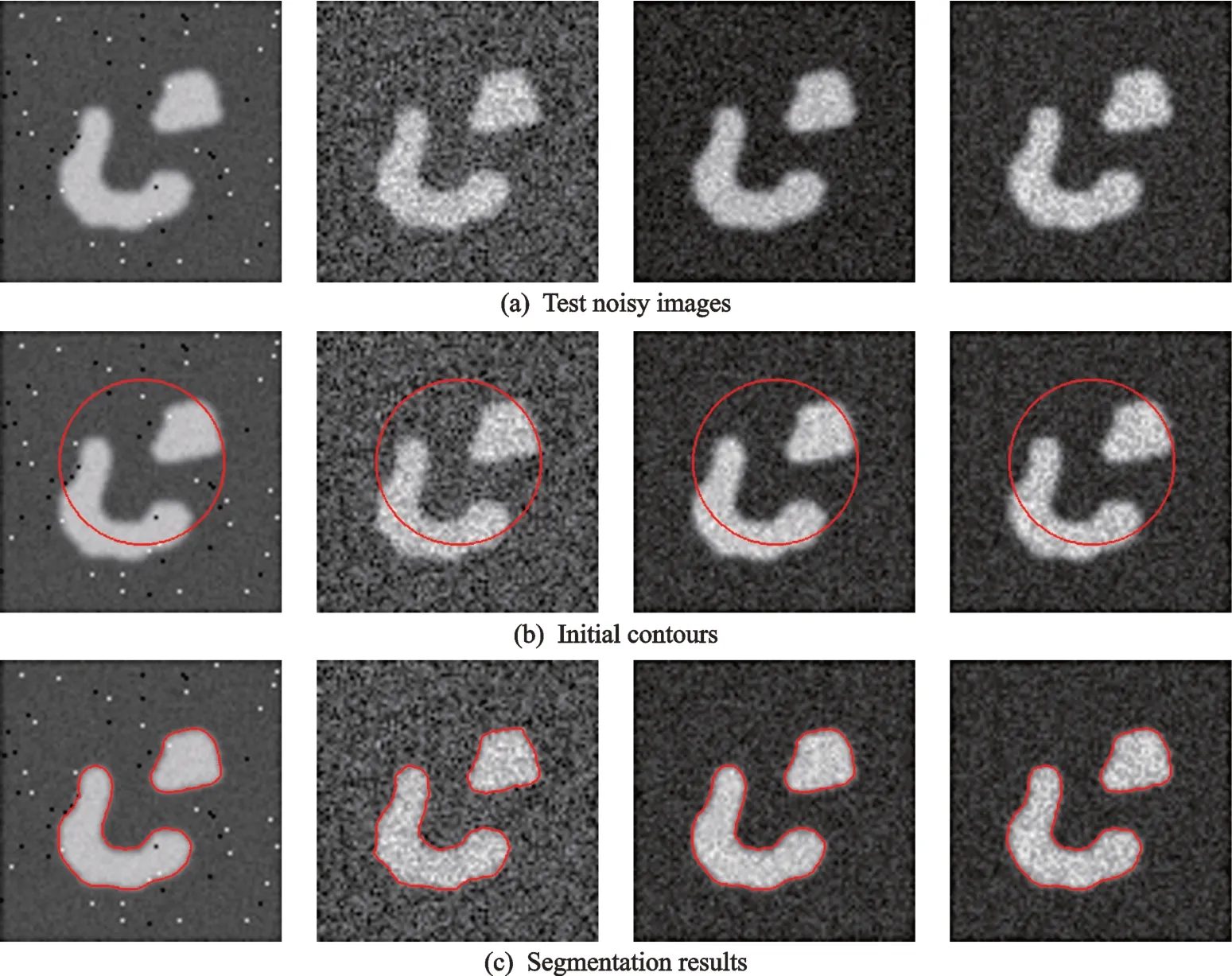
图8 本文模型不同噪声图像的分割结果Fig.8 Segmentation results of different noise images by the proposed model
3.7 定量分析
为客观评价和分析模型的分割质量,本文采用了Dice相似系数[21](Dice similiarity coefficient,DSC)、Jaccard相似性系数[22](Jaccard similiarity,JS)来评价模型的性能,表达式为
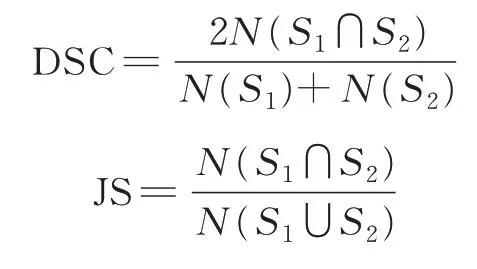
式中:S1和S2表示真实分割的目标区域和提出模型分割的目标区域;N(·)表示所包含像素点数量的集合。DSC和JS系数越接近1,表明分割结果越准确。表1和表2分别展示了图5(a)中3幅测试图像和图7(a)中2幅测试图像利用不同模型分割结果的DSC和JS系数值。从表中可以看出,本文模型较其他模型能取得更准确的分割结果。
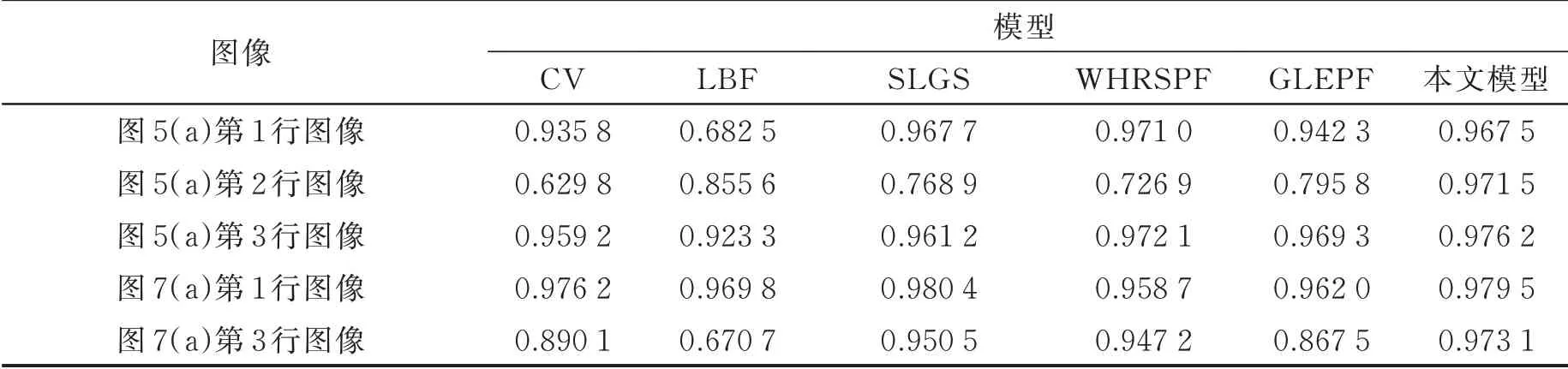
表1 不同模型的DSC系数Table 1 DSC coefficient values of different models
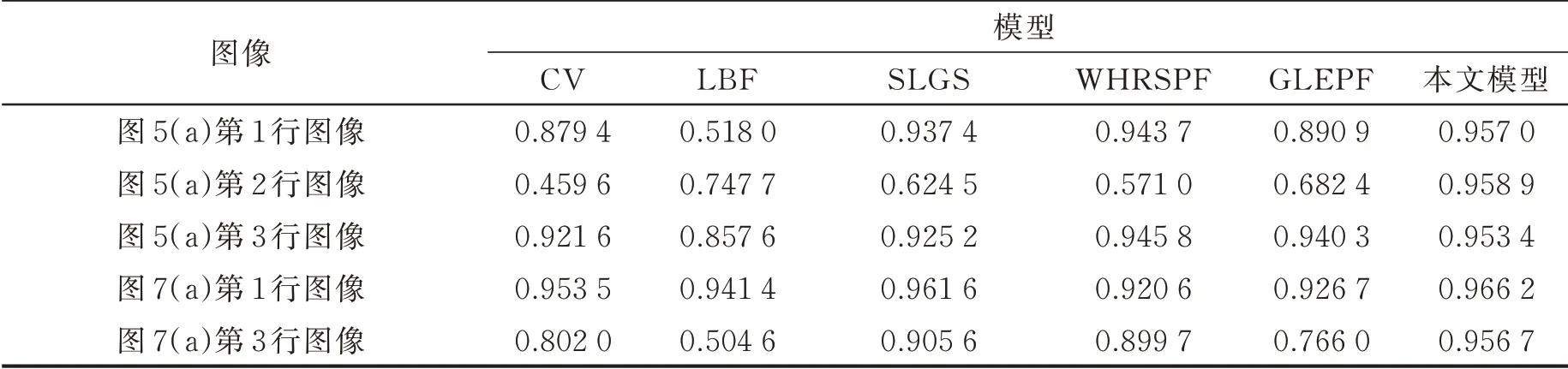
表2 不同模型的JS系数Table 2 JS coefficient values of different models
4 结束语
本文提出了一个结合混合符号压力函数的活动轮廓模型。首先,利用图像的全局和局部信息,根据当前活动轮廓的位置,构造一个混合符号压力函数,该函数通过自适应权值线性组合一个全局压力项和一个局部压力项,根据图像的全局和局部信息自动调节全局压力项和局部压力项比重,得到图像相对于当前活动轮廓的混合压力。然后,结合此混合符号压力函数,构造活动轮廓的演化方程,活动轮廓在混合压力的引导下自动地收缩和扩张,并朝目标边界运动,最终停留在边界上,实现图像分割。最后采用交替迭代算法对模型进行求解。实验结果表明,该模型对初始轮廓有较强的鲁棒性,可以准确地分割灰度不均和模糊边界图像,并较好地应对各类噪声的干扰。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
金桥(2018年4期)2018-09-26
中国交通信息化(2017年4期)2017-06-06
北京航空航天大学学报(2016年9期)2016-11-16
科技传播(2012年2期)2012-02-01
大灰狼(2009年7期)2009-08-26