飞机停机位推出轨迹仿真研究∗
2022-02-18 09:03左青海
舰船电子工程 2022年11期
曾 琛 左青海
(1.中国民航飞行学院新津分院 新津 611431)(2.中国民航飞行学院空中交通管理学院 广汉 618307)
1 引言
地面交通的拥堵会导致航空器地面运行的复杂程度加剧、同时安全性大幅度下降。由此可以看出,在交通量十分大的枢纽机场,能够精确地模拟出航空器的推出轨迹,能够帮助判断正在推出的航空器与其他正在移动或静止的航空器或固定障碍物是否存在冲突,能较好地为机坪区内的冲突解脱提供帮助,也是保证航空器在地面安全运行的第一步,同时能为飞机推出自动化软件开发提供理论支持[1]。
本文从运行方面,通过对飞机推出运动的行为特征进行分析,使用Matlab对飞机机位推出轨迹进行运动学仿真,运动学方法所得到的轨迹可以帮助机场管制人员掌握航空器推出轨迹,更好地解决机坪推出运行冲突[2],减少推出事故发生的概率,提高航空器在机场机坪范围内推出效率和安全水平,并为提高机场范围最大接收航空器服务数量夯实基础[3]。
2 航空器推出冲突分析
航空器在推出时,由牵引车将其推出到达机坪滑行道指定点,该种方法是喷气式航空器常采用的操作[4~5]。航空器推出冲突可以归为以下三类:
1)离港航空器正在被拖车推出机位时,邻近或相对机位同时存在飞机在相近时间段内被推出的行为。因此两架飞机可能在该推出过程中发生冲突。
2)进港航空器正在自行滑入机位或正在滑行进入停机坪区域时,和滑行前方另一架正在推出、即将推出、已完成推出的离港航空器发生冲突。
3)离港航空器正在推出时,与地面保障车辆或其他障碍物存在冲突。
由此可以总结出航空器滑入或推出时,由于空间限制以及资源冲突,其两者以及地面其他障碍物可能会存在潜在的影响,从而导致出现无法确保航空器安全地从机位推出或驶入停机位的情况。此外,在推出执行过程中,拖车驾驶员对机坪周围环境的反应,对翼尖和相邻障碍物的间距掌握,恶劣天气导致的低能见度等是产生推出冲突的重要因素[6]。
3 机位推出运动学建模
3.1 推出轨迹建模基本假设
由于考虑到机场机坪管制运行的实际情况等因素的影响,我们对建立的模型作以下假设:
假设1:前起落架的所有轮胎接触点合并为一个可转向的中心参考接触点。
假设2:主起落架的所有轮胎接触点合并为一个可转向的中心参考接触点。
假设3:航空器任意位置之间的距离视为恒定的,即可看作一个刚体。
假设4:航空器主起落架中心参考接触位置严格按照推出滑行道中线运行。
假设5:航空器推出过程中,其推出速率为固定值。
假设6:航空器推出时,忽略其轮胎出现的打滑侧滑、空转带来的潜在影响。
3.2 运动学约束方程
基于以上假设,构建了如图1所示的笛卡尔坐标系。其中(x1,y1)为航空器前起落架轮子中心参考接触位置坐标,(x2,y2)为航空器主起落架中心参考接触位置的坐标。L为航空器前后起落架沿机身纵轴的距离,即前后轴距。R是航空器推出过程中使用的曲线半径。α为航空器纵轴与X轴的夹角,β为航空器前起落架中心参考接触位置的转弯角[7]。当航空器开始推出出机位时,前起落架中心参考点的角度会增大,并在推出完成后回到初始的角度,而机身纵轴与X轴的夹角会从一开始的pi沿着一定的方向减少或增加pi/2。
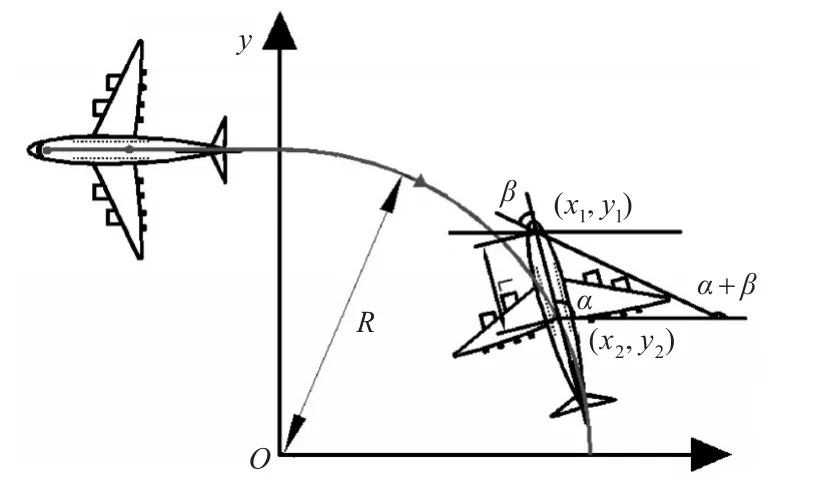
图1 航空器推出过程运行图
按照运动学非完整约束的限制,即与切向垂直的横向速度为零的条件和如图1所示的航空器运动速度v1和主起落架中心参考点坐标的角度关系,可以得到航空器推出的约束方程,即
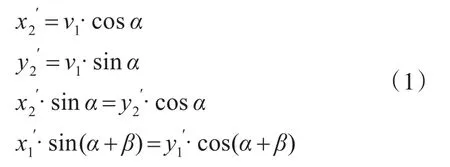
由于航空器架构固定,因此前后起落架中心沿航空器纵轴的距离,即前后轴距L恒定,可得两坐标之间关系:

显而易见,主起落架中心参考位置的相关运行参数导数满足以下约束方程:
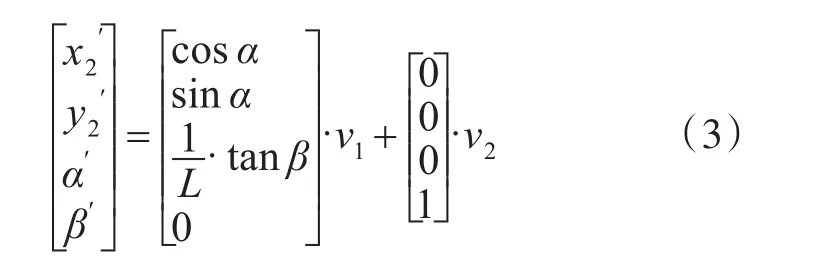
该式中v1是航空器推出过程中的推出运动的速率,v2是航空器前起落架中心参考点的转弯角的速率。航空器主起落架中心参考点相对于X、Y轴的运动速率仅与推出速率v1相关,而前起落架中心参考点的角度变化仅与其转弯角速率v2有关。
因此上述描述航空器主起落架中心运动及两个角度变化算式可以简化为

3.3 标准链式模型
通过对非完整系统进行反馈变换,从而使系统转换成为链式形式。在控制系统设计中,首先通过状态输入将系统转换为某种规范形式即链式形式。现有许多的非完整系统通过坐标和输入变换局部或全局转换为所谓的链式形式,并且已被用作非完整系统的分析和控制设计中的典范形式。
将其运动学约束方程转换为链式模型可便于之后通过计算机系统进行仿真模拟。由于得到的非完整运动学方程是无法积分的形式[8],因此选择使用链式模型将其转换为可积形式才便于后文对其结果进行模拟仿真。
将系统转换为链式形式与通用的非线性系统的精确线性化条件密切相关,使用链式模型,其优点是可以有效地找到用于任意配置之间的操纵系统路径[9]。一般的链式模型可以写成以下形式:
3.4 航空器推出运动学求解模型
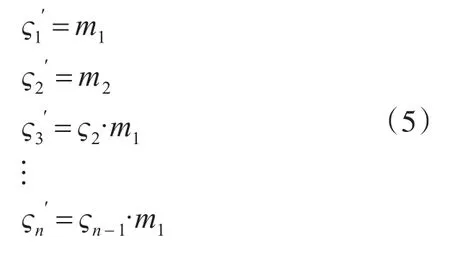
非完整运动经过一定的运算方法后可以将其扩张到n维空间,由此可以得到上述式(5)的非完整运动约束方程链式表达模型,并且符合式(5)链式模型的要求,如下所示:

按照图1中模拟的航空器推出运动过程,根据文中假设的第二个条件,本文将航空器主起落架中心参考位置在t时刻的坐标设定为(x2(t),y2(t)),可以得到如下所示的链式表达模型:
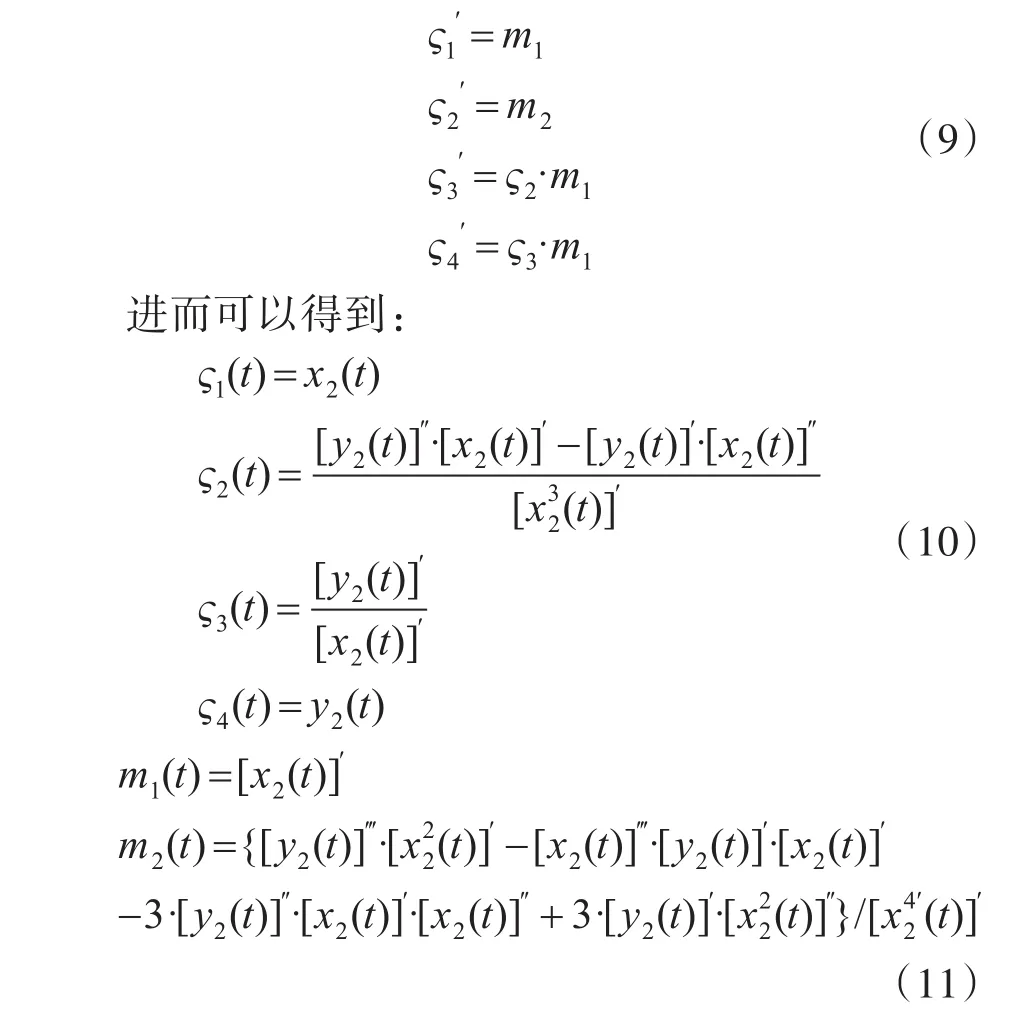
根据式(10)、(11),可以得到航空器主起落架中心运动状态的参数表达关系(x1,y1,x2,y2,β ,α),接下来便可以得到动态计算航空器运动轨迹的运动学方程:
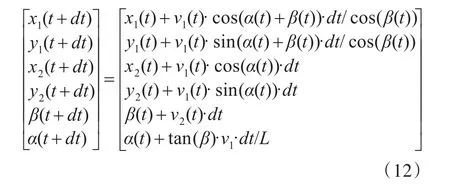
由图1可以发现β可以看作已知的航空器前后起落架轴距L与转弯半径R之比的反正切函数,因此上述公式中的β可以简化为以下表现形式:
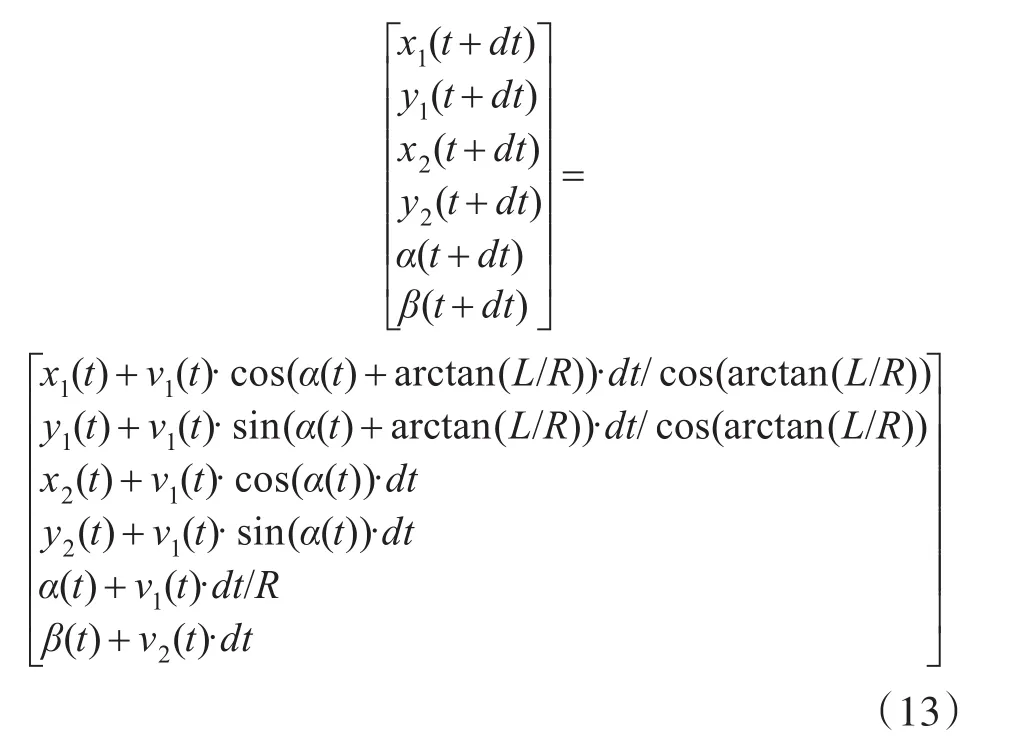
该运动方程可认为属于前进欧拉法,即目标的现状态参数为上一状态参数与其导数和dt乘积之和[10]。
4 仿真应用与算例分析
通过上文对航空器推出建立了运动学模型,为了验证文本基于非完整约束下提出的航空器推出的运动学方程,选择了A320为研究对象,在设定曲线半径R=40m的情况下对其机位推出行为进行计算。仿真过程包括航空器从开始推出,即机身纵轴与x轴夹角180°,直到推出过程结束,即纵轴与x轴夹角减小为90°或270°。该过程主要是对航空器前起落架中心参考位置坐标和主起落架中心参考位置坐标进行动态计算,最后得到一个以时间为变化的关于两个中心位置参考点的运行轨迹曲线。
根据A320的机型特征,其轮轴间距L=12.59米,推出线速度v1=-3m/s,初始机位纵轴与x轴夹角为180°,分别模拟了航空器向上和向下推出两种情况,得到在非完整运动约束条件下,A320的推出过程仿真结构。其中图2为航空器向上推出轨迹,图3为航空器向下推出轨迹,蓝线为航空器前起落架中心参考点的运动轨迹,红线为航空器主起落架中心参考点的运动轨迹。
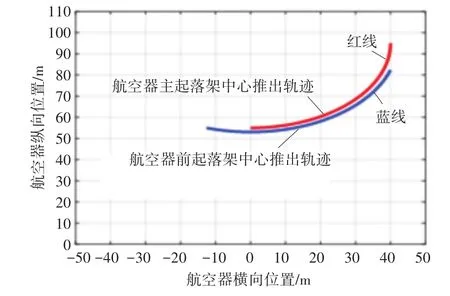
图2 A320向上推出轨迹
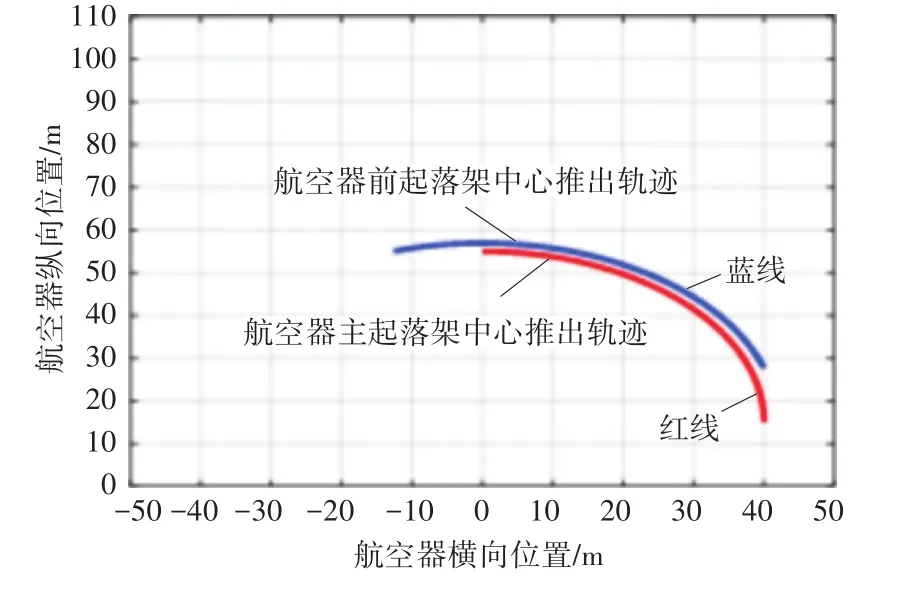
图3 A320向下推出轨迹
结合上文对于A320的推出轨迹的仿真,本文提出的基于运动学非完整约束的航空器推出轨迹模型,可以应用于以下几个方面:
1)对于机坪区域内,为航空器推出冲突的解脱提供帮助。根据相应机型推出时会产生的轨迹,能够帮助管制员对冲突位置进行预测,为及时避免冲突产生采取有利措施。
2)提出的运动学方程在应用中生成的二维推出轨迹,可用于为机务推出航空器时提供参考。由于航空器靠牵引车进行推出操作是一个被动的被机务人员推出的过程,该过程可能依靠的是工作人员的经验,因此为机务人员提供预测的轨迹可以辅助推出操纵,在一定程度上提高推出的安全性。
3)可应用于设计层面的CAD二次开发。本文提出的推出轨迹模型可应用于CAD二次开发中,使用编程语言在CAD中实现优化和改善,为机场设计人员及项目安全评估提供航空器推出轨迹参考。
5 结语
为保证航空器在推出时,满足相关规定的安全净距要求,因此通过航空器推出的运动特征构建了非完整约束下的运动学模型,模拟仿真各类型别航空器在正常推出过程中的精细化路线,以此帮助管制员评估航空器推出是否安全,可在一定程度上减少该过程事故的发生率,同时可为航空器自动化推出的研究提供一定理论基础。
猜你喜欢
工业建筑(2022年3期)2022-08-01
建筑机械化(2022年2期)2022-03-06
科技和产业(2021年1期)2021-02-22
西安航空学院学报(2020年5期)2020-12-08
物联网技术(2018年4期)2018-05-15
中学历史教学(2017年10期)2017-12-20
制造业自动化(2017年2期)2017-03-20
数码影像时代(2015年6期)2015-10-20
声屏世界(2015年3期)2015-02-28
中国工程咨询(2015年10期)2015-02-14