罗兰C绝对时间同步快速恢复方法研究
2022-02-19 11:37李靖宇温国良韩红印
电子测试 2022年1期
李靖宇,温国良,韩红印
(91821部队,广东潮州,515736)
0 引言
罗兰C系统实现授时必须具备两个条件:发射时间(TOT)绝对时间同步、授时电文的播发。本文重点讨论绝对时间同步过程中的常见问题。
1 罗兰C授时的基本原理
1.1 绝对时间同步
1.1.1 发播偏差测量
罗兰C绝对时间同步的基础是建立信号发射时刻(TOT)与系统时间的关系。实现TOT与系统时间标志(基准)之间发播偏差测量是必须的环节。其测量原理如图1所示。
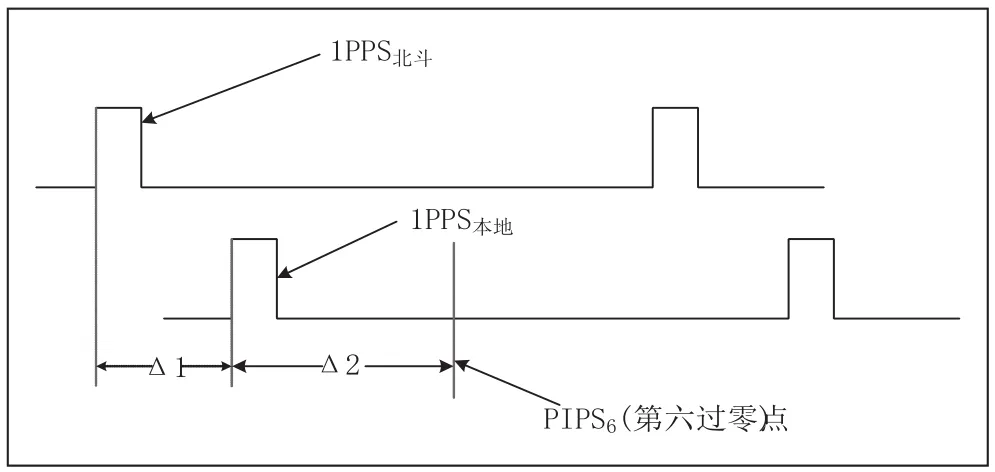
图1 发播偏差测量原理图
发播偏差Δ=Δ1+Δ2。1PPS北斗为卫星接收机输出的秒信号。1PPS本地是本地原子频标经分频钟产生的秒信号。PIPS6信号由从天线电流取样环反馈信号提取,相对真正发射时刻存在固定的反馈延迟约200ns,可以测量得出。
1.1.2 定义本地秒
第一步:长按分频钟同步按钮,即可将1PPS本地与1PPS北斗完成相位同步,同步误差小于10nS。
第二步:将卫星授时接收机输出的时刻信息(例如:2021年08月10日16时10分25秒)赋予本地秒。输入时刻信息过程中要超前10秒左右,待卫星接收机钟面秒跳到该时刻时迅速按下确认按钮。
1.2 授时电文播发
经过上述两步操作即完成了本地秒(1PPS本地)的绝对时间同步。根据图1的测量的数据即可获取罗兰C信号的发播时刻(TOT)。此信息通过分频钟串口输送到编码形成设备,编码形成设备控制调制控制设备形成授时电文再通过发射机发射出去。其流程如图2所示。
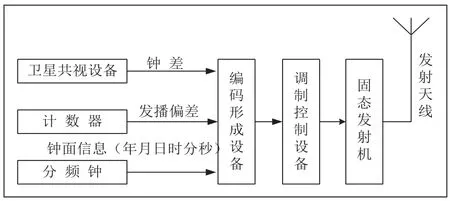
图2 授时信号播发原理图
2 发播时刻(TOT)的推算与监测
编码形成设备和共视设备对发播偏差数据进行了显示和监测,主要有共视偏差和同步调整两个重要数据,分别对应Δ1和Δ2。
2.1 共视偏差
共视偏差反映的是本地秒(1PPS本地)与卫星接收机输出的标准秒(1PPS北斗)的偏差,即图1中的Δ1。共视偏差监测的是两个秒信号的相位差,用普通计数器即可测量,在此不再赘述。
2.2 同步调整
同步调整窗口位于编码形成设备界面,同步调整窗口数据与Δ2测量数据密切相关,其显示数据直接反映了授时基准是否正确。一旦有大的波动往往预示着授时信号的错发。
2.3 任意时间秒UNTOC计算方法
由于罗兰C信号的周期(GRI)和UTC秒信号(1PPS)不是等周期信号,罗兰C信号的台链时间基准(CTR)与UTC秒信号只有在特定的秒上才是重合的。罗兰C信号CTR重合(对准)的UTC秒为“符合时间(TOC)秒”,非TOC 秒与其后续最近出现的CTR之间的间隔为非TOC秒偏差(UNTOC)。东海台链的GRI 为 83900us,其 TOCI 为 839S,共有(839-1)种 UNTOC。相关时间概念如图3所示。

图3 几种时间关系
给定时间UNTOC按下述方法计算[1]:
(1)计算给定时间[MJD(d)hhmmss]与发射脉冲起始时间相差秒数t1:

(2)计算发射脉冲起始时间到给定时间扣除整数PCI后的余数t2

(3)用PCI减去该余数,即为该时间秒的UNTOC:

MJD(d):给定日期的约化儒略日;
MJD(d0):罗兰起始日期的约化儒略日,等于36204;
LS:UTC闰秒,当前为27S;
Int (x) :对 x 取整,PCI=2GRI。
对于主台,ED=0,发射脉冲起始时间即是罗兰起始时间。对于副台,ED≠0,发射脉冲起始时间是罗兰起始时间滞后发射延迟(ED)的时间,编码形成设备软件已设置为固定参数。
2.4 同步调整数据与△2的关系
UNTOC实际测量通常采用计数器,1PPS开门,CTR关门,所计间隔为正值。对于不同的非TOC秒,CTR与UTC秒的相互间隔(偏差)是不一样的,不方便监测。利用测量值减去理论推算值则可以得到一个比较稳定的数值。
利用实测值Δ2与UNTOC理论计算值相减后的差值作为同步调整数据,用来衡量本地发射基准稳定度,同时它避免了只能在长时间间隔(TOCI)实施一次测量的缺欠,每秒都可以进行测量。
3 发播时刻(TOT)常见错误分析及基准恢复方法
3.1 发播时刻常见错误
发播时刻常见有以下3种错误:①溯源偏差过大,溯源设备界面显示;②同步调整数值过大,同步调整窗口显示;③在线边和备用边本地秒偏差过大,监测计数器显示。
上述问题其主要问题在于以下方面:
3.1.1 参数设置
由公式(1)-(3)可以看出 :闰秒、GRI、钟面时间输入错误均会影响到UNTOC理论值,进而导致同步调整数据显示不准确。如果监测数据超差,要注意检查相关参数输入是否正确,尤其在设备重新开机对准时。
3.1.2 装备故障
常见装备故障有卫星接收机输出秒信号不稳定,亦或分频钟产生的本地秒不稳定,直接导致测量数据过大或者不稳定跳动。若卫星接收机故障,一般会双边溯源数据均不正常。若单分频钟故障,对应的溯源数据、同步调整数据、双边监测计数器均会显示不正常,更换相关备件即可。
3.1.3 测量误差
测量误差常见于在线边与备用边偏差监测,监测计数器数值由10ns级跳至10us级。这主要是测量仪器分辨率问题。如图4所示。
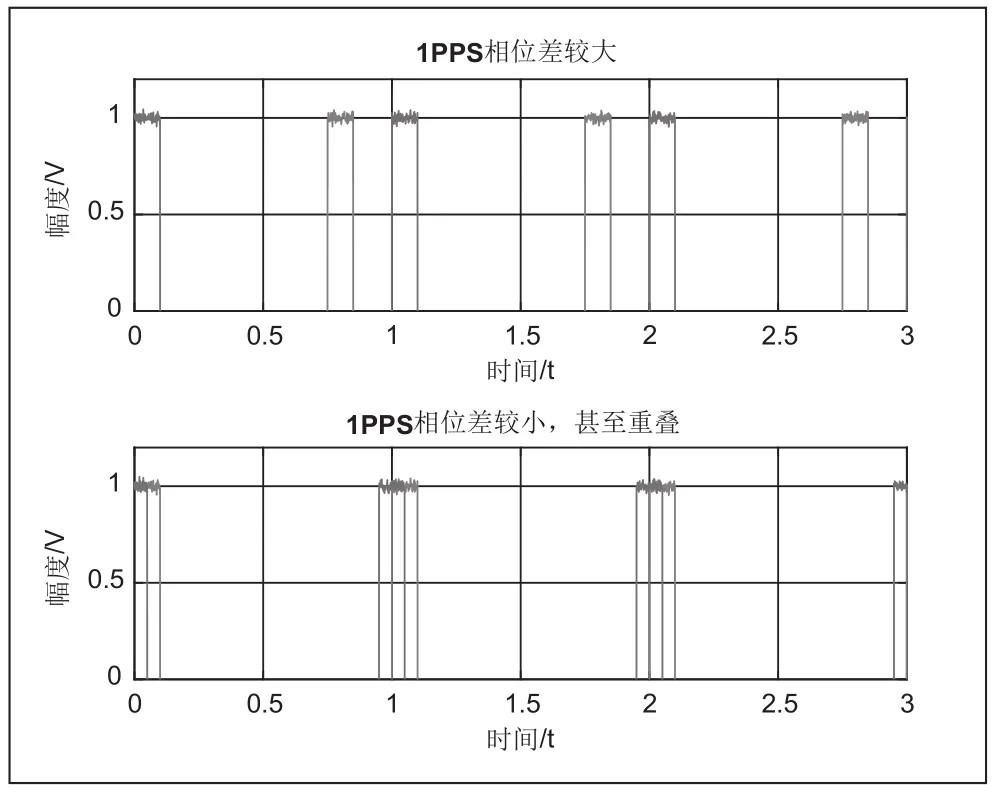
图4 秒信号相位差测量示意图
由图4所示,秒信号相位差较大时,计数器分别用两个秒信号的上升沿作为开、关门可以精确测量出其相位差值。如果两个秒信号相位差过小,甚至重叠的情况下,计数器无法分辨,开关门可能由秒信号的相位噪声触发,此时测量的是秒信号的脉宽。脉宽一般是10us量级或者1ms量级,视设备不同而定。如果双边监测计数器跳到10us量级要高度怀疑双边同步过紧,出现此现象一般基准信号并无问题,可以用示波器进行波形检测,将单边1PPS拉开50ns,此现象可消失。
3.2 溯源缺失情况下时间基准恢复方法
如果出现绝对时间同步数据错误则意味着授时信号错发,需要重新进行时间同步。若溯源设备故障,则很难完成同步。利用现有装备,可以从下面两个方面进行操作。
3.2.1 原子钟守时方法
由于秒信号相位差测量要求比较精准,因此基准恢复的主要问题在于秒信号相位的同步,而秒的时刻信息来源则相对较广。例如:手机的网络时间就可以达到秒级精度,在溯源缺失情况下可以作为参考。
日常要注重利用台站的原子钟进行守时,以维持稳定的秒信号。其中TA1000型激光抽运原子钟具有外部信号同步功能,方便进行守时。
如图5所示,将外部(卫星接收机)输出的秒信号连接到原子钟1PPS-SYNC端口,打开时间管理界面,按下时间同步按钮即可完成原子钟1PPS与外部秒的同步。对于更精密的时间同步可以计算原子钟1PPS与外部1PPS的线性偏移率,进行校准情况下可以同步到100ns以内。最好每周同步1次,以备溯源设备故障时可以将TA1000的1PPS参考信息源。
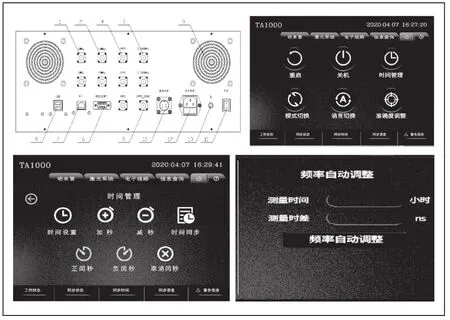
图5 利用外信号同步原子钟秒信号方法
对于5585B型原子钟,没有外部秒信号同步功能,可以利用计数器测量其1PPS与外部(卫星接收机)1PPS的相位差,记录偏差值,也可长时间监测计算出线性偏移量。利用5585B原子钟1PPS作为参考基准时,按下分频钟同步键后,需再进行相应移相处理,移相值即为日常记录的秒信号相位差值,移相后即可完成秒信号同步。
利用原子钟守时法在原子钟重新加电后要重新进行同步或记录秒信号相位差。
3.2.2 监测站数据反馈法
除了采用原子钟守时法还可利用监测站反馈数据法进行逐步逼近。
因无稳定的参考秒信号,此时进行秒信号同步已无意义。可以先依据手机网络等信息源提供的时刻信息完成钟面信息输入,确保信号播发,此时授时偏差较大,且数值随机,往往从几十到几百毫秒不等。
若监测站可以监测到数据,可以根据监测站提供偏差值进行移相操作,逐步移相至us级以下偏差,此时秒信号基本完成了粗同步,再根据外部(手机)网络等信息源提供的时刻信息对本地秒进行对时,对时完成后再根据监测站监测结果重复移相、对时操作,逐步逼近准确值。
此种方法受监测站接收条件影响,在接收机未锁定或者锁定错误情况下,提供的反馈数据参考性较差,同步精度也较低。甚至在偏差较大,信噪比较低的情况下,监测站也可能收不到信号,需要逐步对分频钟进行大幅度移相操作,以便监测站能够接收到信号,此过程时间较长,不利于基准的快速恢复。
3.2.3 先移相后对时原则
在定义本地秒过程中,明确了先同步,再对时。即:先消除本地秒与UTC秒的相位差,使本地秒与UTC秒相位差同步到10ns以内,再对本地秒进行赋值。两步不可以颠倒,否则会导致本地秒与UTC秒偏差过大,也就是未对准。此时,若调整溯源偏差到正常值,则会出现同步调整数据偏大;若调整同步调整数据到正常值,则会出现溯源偏差过大。
4 小结
绝对时间同步错误是罗兰C台站在日常播发中经常遇到的问题。尤其在溯源设备故障情况下,要恢复授时基准往往比较费时费力。本文通过分析相关原理,利用现有装备,结合日常工作经验提出了恢复基准的方法,对台站相关故障处置具有参考意义。
猜你喜欢
海外星云(2021年9期)2021-10-14
初中生世界·八年级(2021年2期)2021-03-11
文苑(2020年10期)2020-11-07
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
理财·市场版(2019年5期)2019-09-10
检察风云(2018年12期)2018-07-04
特别文摘(2017年13期)2017-11-11
环球时报(2016-11-25)2016-11-25
课堂内外(小学版)(2015年6期)2015-09-10
文苑·感悟(2008年6期)2008-07-28