基于智能机器人的多传感器信息融合技术
2022-02-19 11:37王伟
电子测试 2022年1期
王伟
(乌鲁木齐明华智能电子科技有限公司,新疆乌鲁木齐,830000)
0 引言
如今传统机器人加上多传感器以及外界信息融合技术相结合形成智能机器人。其运作方式跟人类的拷贝如出一辙,人类的五官系统就相当于智能机器人传感器的运作方式,所以说,如今能对于外界环境的变化做出反应的机器人就称之为智能机器人。其次,要想机器人做出较为智能的运作,那么学者就要将传感器所采集到的外界环境信息加以综合性的判断。这一系列的操作更能实质性地体现出机器人的智能化。
要想弥补单一传感器的缺陷,那么就要将多传感器信息融合应用到智能机器人之上,这样做更能有效地得到描述系统的更具体性的解释。
1 智能机器人的感觉
立体视觉传感器系统、触觉传感器系统、听觉传感器系统、测距传感器系统、力和力矩传感器等这一系列的传感器都是一个功能较强的智能机器人所要装配具备的东西。要想使得智能机器人能完进行综合,对他周围的环境和正在发生的事件进行估计这是人类的基本本能。本质上多传感器信息融合与人类大脑在收集处理信息的方式一样,要想多传感器在使用的过程中有效地利用多个传传感器完成一些高难度运作,那么学者就要将同一类型或者不同类型的传感器一起存在于机器人的传感器系统里。造成信息丢失和机器人的决策失误这一问题的原因都是因为各个不同的传感器在采集的信息中只做了单一的处理和判断。更多的引利用现有的信息融合科技,让处于相同外界环境下的多个传感器系统依据外界所给出的一定计算与分析开展融合。改善了这一状况之后,就能得出有效的解释。
2 多传感器信息融合的基本原理
传感器技术是在上世纪五十年代中期才问世完成的,在那时候计算机技术和传统的数字控制技术相对比与来说,传感器技术的发展还存在较大的问题,很多成果都是停留在实验室阶段,没有投入到具体的应用当中。传感器技术的发展经过了三个阶段,分别是结构性传感器,物体传感器以及智能传感器,对于当下的多传感器融合体系结构可以划分为,分布,集中,混合三类,主要如表1。

表1 三种传感器融合体系结构的对比
首先对于结构型传感器来说以自身的结构部分的变化导致出现某种力场出现一定的变化这样可以反映我们实际测量物体的大小和相关的变化物理传感器;利用构成传感器的一部分材料加上材料本身拥有的特性在使用的情况下出现了一定的变化,从而将信号转移成为电信号或者其他类型的输出信号。日常生活中,人们对于认知世界会将身体上的各个器官所接收到的外界信息来进行信息的分析和处理之后来开展信息的综合,为接下来需要对外界环境以及正在发生的事情做出相对应的反应。百变不离其宗,多传感器的运作方式与人们所做出的这一系列反应基本一致。因为多传感器运作时就是利用多个传感器资源、通过对接收到的各种观测信息在空间和时间上的信息冗余与互补,并依据一种特定的方式优化准则组合起来,从而得出对于观测的外界环境进行一致性的分析以及描述。其基本目标就是基于各个传感器分离观测到的信息通过对于该信息的优化组合,得出更多权威性、确定性的有效信息。学者在研究的过程中,其最终目的就是利用现有条件的多个传感器共同运作或联合运作的优势来大大提高整个传感器系统的权威性。
3 智能机器人信息融合研究的内容
如今,要想对于智能机器人信息融合有更好的认知,那么学者就要从融合结构、融合算法、传感器距离测量问题、目标识别系统、自主导航系统和定位以及路径规划跟踪这几个板块了解研究。
3.1 融合结构
探究智能机器人的融合结构时,可将其划分为三个主要的板块:集中时融合分布式融合以及混合式融合,集中式融合就是将各个传感器对于外界所采集到的信息集中到一个信息融合中心进行处理;分布式融合就是将各个传感器所采集到信息分别进行预处理,然后再输入进信息融合中心进行二次权威性的处理;较于前面两种融合方式,混合式融合有着更好的融合,混合式融合在研究时既有分布也有集中,它的每个传感器信息都可以在研究过程中被其多次运用。
3.2 融合方法
智能机器人信息融合有着很多种融合方法,但比较被人熟知的却只有一下几种,主要包括:加权平均法、Kalman滤波、扩展Kalman滤波、Bayes估计、证据推理、模糊逻辑、神经网络以及基于行为方法和基于规则方法等。
3.3 传感器测距问题
需要智能机器人能有效的感知外界所给予的信息要素,距离这一个信息就是当中最重要的信息。所以距离就将起到非常重要的作用。
3.4 目标识别
怎样提取最稳健的、能够进行分离的目标特征,就要从目标识别里着手处理。智能机器人利用视觉传感器以及各种测量距离的传感器进行操作处理的最初目标就是机器人需要进行目标识别形状、长短、方位、位置和颜色等就包括在识别的信息里。
3.5 自主导航
当下在智能机器人的研究里,频繁出现的一大热点问题就是导航技术,这也是研究智能机器人的一项核心技术。接下来将为大家讲解在导航技术中D.White所提出的三个问题。
3.5.1 定位问题
对于该问题的研究时,学者应将重点放在如何利用智能机器人的内部与外部传感器来使得机器人能够有效地获取外界的环境信息,让研究人员能够在第一时间确定机器人在作业环境里的行进方位。
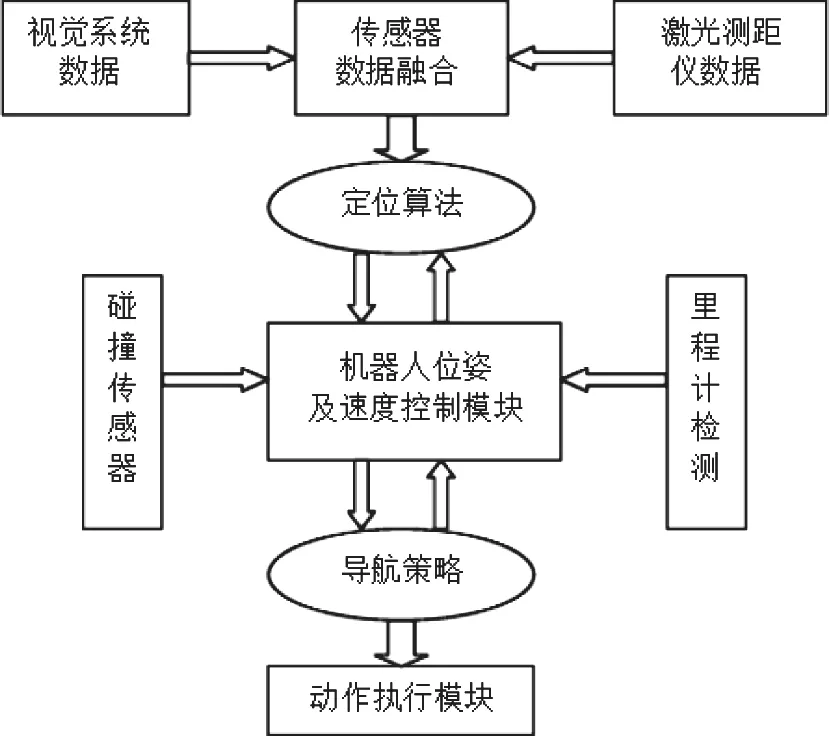
图1 融合方法
3.5.2 路径规划问题
在智能机器人的行进过程中,主要需要学者重点研究的就是机器人路径规划的问题,这一问题主要就是研究如何让智能机器人在一条外界所提供的行径路径上做到从开始到结束过程中的无碰撞。在进行研究时,一些路径会出现局部位置或者完全位置,这对于研究过程会产生一些影响因为智能机器人在作业路径中要有效地获取目标障碍物的方位、形状以及长度等信息,让智能机器人在运作行进的过程中不触碰到任何障碍物。目前以自由空间法的应用范围较多,自由空间发是使用多边形等模式,构建一个自由完整的空间。进行路径对话的时候需要对于空间进行描述,也就是建模,在二维平面运动当中,规划环境的边界,使用多边形描述,将机器人看做点,实现路径的规划。
如图2,S为起始点,G为终点,红线为路径。

图2 路径规划问题
4 信息融合的关键问题
4.1 数据对准
学者在研究多传感器如何系统时,应该注意到,研究过程中要将每个传感器所提供的观测数都计算在各自的参考框架之内。在这一系列操作中学者要注意的是,由于运用了多传感器,多传感器时空配准引起的舍入误差必须进行补偿,不然所得到的数据就会出现偏差,从而影响到学者对信息融合研究。
4.2 同类或异类数据
一般情况下,多传感器所给学者提供的数据属性可以作为同类的情况出现,也可以作为异类的情况出现,那么这两者区别在哪,我们可以简单的理解为同类所提供数据的信息较于异类所提供的信息数据在实践上有着不同,基于上述言论,我们就知道由于出现了同类以及异类,所以就会导致观测到的信息产生分歧,所测量到的信息维数相互矛盾等实质性的研究问题,使得观测人员在获取这些信息之后要想2加以处理就变得更加困难。
4.3 传感器观测数据的不确定性
传感器在工作的环境中会有着不确定的因素,这一些因素就会导致学者在观测到这些数据里会有着噪声成分。学者在研究的过程中要怎样解决或者避免这些问题,这时就需要我们将对于多源观测的数据进行有效性的验证分析,并且对这一点补充综合,这样才可以有效地降低噪声等影响实验等外界信息。
4.4 不完整、不一致及虚假数据
学者在将多传感器所采集的信息进行融合的时候可能会出现接收到的这一测量信息有着多种解释的问题,我们可以将其成为所获得的测量数据有所缺失,出现缺失之后,随之带来的是多传感器数据在研究过程中会出现对于外界环境观测之后做出不一致或者相互矛盾的状况。此外,学者在对于该项目的研究时由于外界干扰因素以及噪声的影响的存在,所得到的数据往往是虚假的测量数据。要想所得到的数据不出现上述情况,学者就要在研究的过程中让信息融合系统对于这些获得的不完整的以及虚假的数据进行较为合理融合处理。
4.5 数据关联
研究数据关联时会出现一些广泛的问题,在出现这一问题时,学者就要从要单传感器在时间域上的关联问题以及多传感器在地点上的空间域上的这一系列关联问题来处理。解决了这一系列问题后,学者就能确定来自同一目标源的实时观测数据。
5 结论
基于上述所阐述的内容可得出,智能机器人运作中的智能多在多传感器的应用上体现出来,本文阐述与解析了智能机器人的多传感器信息融合技术的内容、问题以及解决方法。从而解决基于智能机器人的多传感器信息融合技术中所出现的问题以及解决方法。
猜你喜欢
管子学刊(2022年2期)2022-05-10
中北大学学报(自然科学版)(2022年2期)2022-05-05
云南画报(2022年4期)2022-05-05
管子学刊(2022年1期)2022-02-17
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
中学课程辅导·教学研究(2017年11期)2017-09-23
影视与戏剧评论(2016年0期)2016-11-23