
太阳能供电系统在索道线路支架上的应用
2022-02-20 06:11田增阳丁洪涛
起重运输机械 2022年23期
蒙 娟 田增阳 丁洪涛
1北京劳动保障职业学院 北京 100029 2北京起重运输机械设计研究院有限公司 北京 100007 3深圳前海索士科技有限公司 深圳 518052
0 引言
随着国民经济的发展,人们对旅游产业的需求日益增加。客运索道作为一种基于山岳型地貌的高效交通运输工具,得到了越来越广泛的应用。这对客运索道的安全运营与维修管理也提出了更高的要求和标准。依据TSG S7001—2013《客运索道监督检验和定期检验规则》的规定,夜间运营的索道支架上需安装照明设施;依据国家客运索道企业安全生产标准化相关规范,客运索道须在索道支架等重点区域设置视频监控设施。因此,索道支架上的摄像头、照明灯等电气设备的应用越来越普遍,逐渐成为客运索道的一种基本需求。
然而,索道支架上的供电问题一直都是索道行业内比较棘手的难题。因为根据TSG S7001—2013《客运索道监督检验和定期检验规则》的规定,从安全角度考虑,索道支架只允许使用36 V以下的供电电压[1]。而索道通常处于偏远山区,索道支架上的设施供电只能取自索道站房。而一般的索道总长有数公里,各个支架直线分布在整个索道线路中,支架间的间距数百米。若采用低压远程供电,在36 V以下低电压的情况下会产生非常大线路损耗,且距离站房越远的支架,线路损耗越大,往往到达较远支架时,电压会下降很多,仅剩10 V左右甚至更少,达不到使用标准,离站房越远、线路越长,损耗越大,这一问题就越突出。当然也可通过增大导线直径减少导线内阻等方式在一定程度上缓解该问题,但是相对应的,使用更大直径的导线进行电力输送会大大增加导线单位长度的质量,增加索道线路负荷,增大施工难度,同时使成本大幅增加。故索道支架的供电的最优解即是能在支架本地解决。基于以上考虑,本文提出一种基于太阳能供电原理的索道支架供电系统,有效地解决了这一问题。
1 太阳能供电系统概述
太阳能供电系统由太阳能板在白天阳光充足时,吸收太阳能并转化为充电电压,给蓄电池组充电,作为储备电源,再由蓄电池组作为电源,给支架摄像头、LED照明灯、太阳能供电系统控制器本身、网络设备等所有支架用电设备供电。太阳能供电系统由主控制器对系统进行智能管控,利用PWM充电技术,合理控制太阳能充电速度,并通过网络设备传输信息,实现对太阳能供电系统的电池电量、充电状态、温度等状态进行远程实时监控。系统选用24 V直流供电蓄电池组与太阳能板连接搭配,因此在充放电时,系统电压低于规范所明确要求的36 V安全电压,严格响应了索道检验的规范要求。
索道支架上的电气设备分布如图1所示,支架摄像头安装在索道支架的横担两侧,用来对支架两端进行视频信息采集,以确保索道运营安全;LED照明灯用于照亮索道支架上的工作区域,以便索道夜间运营和设备维护。太阳能板架设在支架横担之上,其面板应调整至能最大汲取太阳光的方向。太阳能供电系统控制器及其附属设备,安装在支架电气箱内;太阳能充电用的蓄电池组置于电池箱之中。
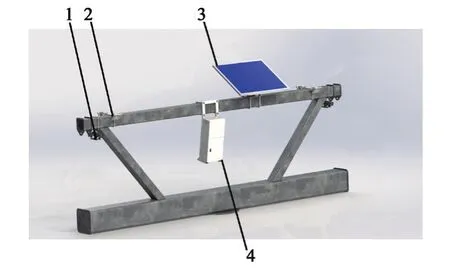
图1 索道支架电气设备分布图
2 太阳能供电系统设计
2.1 总体架构设计
太阳能供电控制系统接线图如图2所示,主控制器(PLC)是整个控制系统的核心,分别连接太阳能板和蓄电池组,通过PWM脉冲调节太阳能板对充电电池的能量输入,控制太阳能充电的进程和节奏,将电能储存到蓄电池组中去。同时通过PLC的输出端口,直接驱动支架摄像头、LED照明灯和光纤收发器(网络设备)等外部设施,为其提供电源的同时,可以管理其开闭状态,实现控制和调节功能。
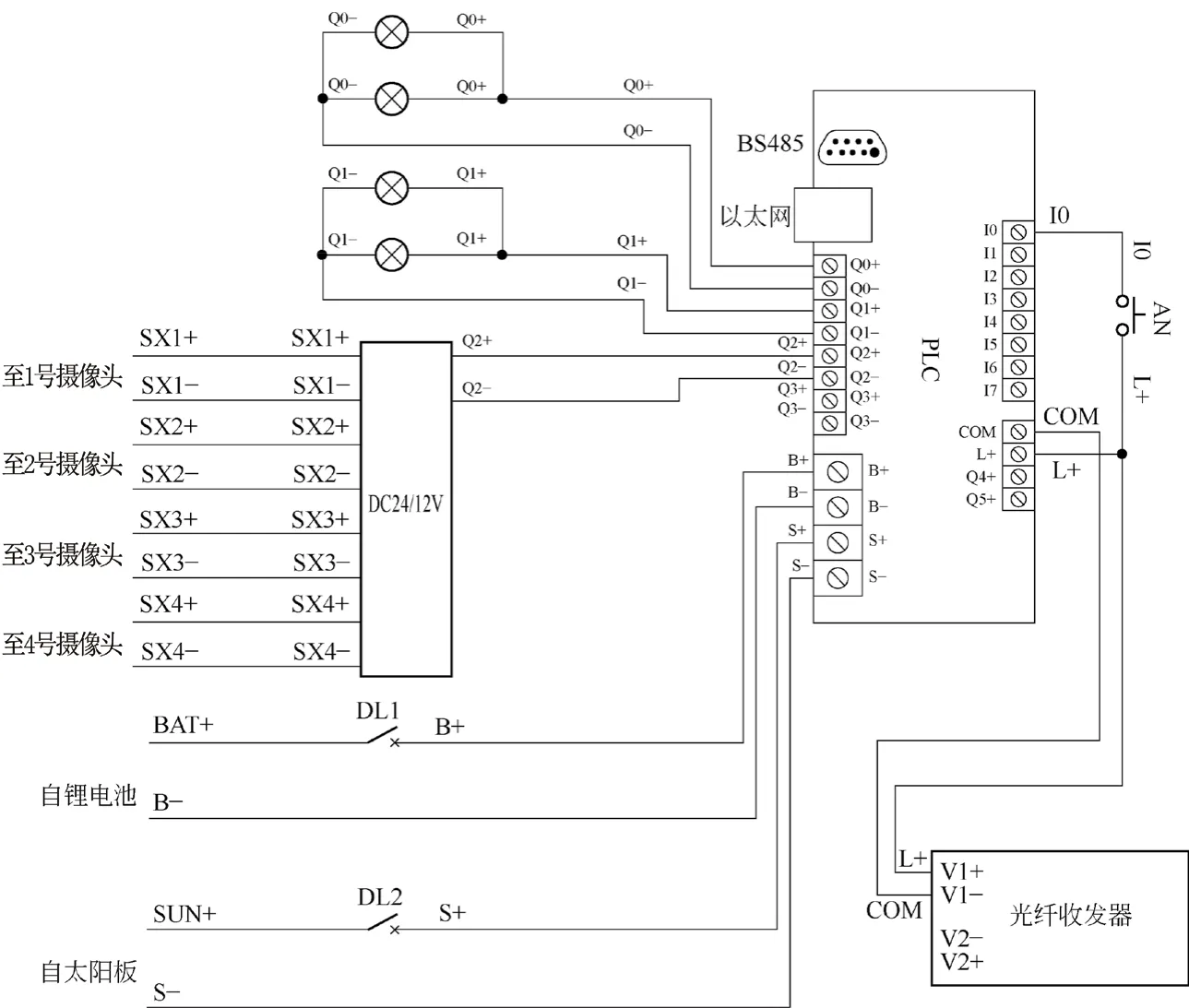
图2 太阳能供电系统接线图
主控制器留有以太网口,可以通过以太网连接至系统局域网,与位于索道站房的人机界面交互数据,从而实现对支架电气设备以及供电状况的远程监视和控制。同时预留了一个RS485通讯口,方便工程人员对设备下载程序和调试。
2.2 主控制器设计
主控制器(PLC)是整个太阳能供电系统的核心,而CPU是主控制器的核心部件。由CPU通过数字量输入电路,采集例如支架摄像头状态、LED照明灯状态等数字量输入信号;通过太阳能充电调节器电路采集蓄电池电压和太阳能电池的供电电压(即太阳能板电压)。将这些采集到的输入信号经由 CPU运算决策后,再通过数字量输出电路去控制支架摄像头、LED照明灯的开启和关闭;并作用于太阳能充电调节器,调节其充电阀门,控制太阳能电池给蓄电池充电的过程和节奏[2]。其内部结构图如图3所示。
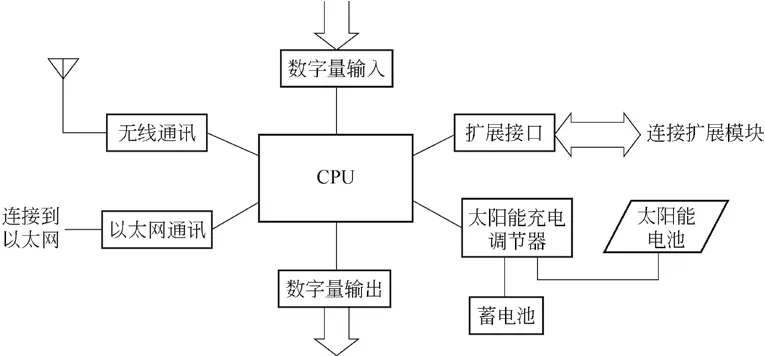
图3 主控制器(PLC)内部结构图
系统需要具备通讯功能将所有采集到的信息,如蓄电池的剩余电量、充电电流、数字量开关状态等实时地传送给控制室的监控界面,以便操作人员了解设备运转情况;并可以通过数字量输出远程控制支架摄像头、LED灯的开启和关闭。本系统设计了以太网通讯电路,以便PLC可以连接到以太网,实现远距离与控制中心的实时通讯。
当以太网通讯由于现场条件限制,例如对于某些特殊线路的索道或者老旧索道改造无法实施时,就需要通过无线通讯的方式来建立支架与主控站之间的联系。因此PLC系统内集成了无线通讯电路,通过无线网络,远程访问控制中心。
当使用方有除支架监控和照明以外的其他应用需求时,PLC系统本身的输入输出点位和类型有可能满足不了使用方需求,这时可以通过扩展接口,连接扩展模块,来完成功能需求的增加。从而将整个支架的所有控制需求全部整合到主控制器中,再统一与主控站交互信息,从根本上解决支架供电和支架通讯的两大核心问题。其中支架供电的核心问题主要是通过CPU的程序控制太阳能充电调节器来执行的。
3 太阳能充电调节器电路设计
在PLC的内部电路中,太阳能充电调节器是系统供电的主要执行部分。如图4所示,来自控制设备(CPU)的PWM输出加到T1的基极,经T1的集电极加到P沟道MOS管T2的栅极。MOS管T2就是连接太阳能电池和蓄电池的通道。R5为T1提供电流通路。当T1管基极加高电平时,T1导通,集电极电流在R5上的电压降加到T2的栅源之间,使T2导通。反之,当T1管基极加低电平时,T1管截止,R5上无电压降,T2管截止。D3是稳压管,其作用是钳位T2的栅源电压,保护T2不被击穿。D2是续流二极管,L1是平波电感。D1的作用是防止在没有阳光时电流反向。
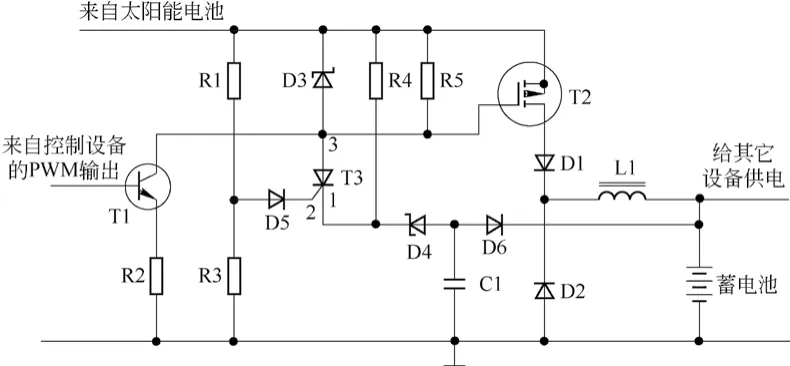
图4 充电电路设计
如果蓄电池在夜晚过量放电致使过放保护动作,蓄电池将不会对外供电。这时即使天亮后太阳能电池已经能对外供电,但由于控制器已经断电发不出充电指令,系统会锁死。为防止这种现象发生,设置了由R1、R3、R4、D3、D4、D5、D6、T3、C1构成了自动重启电路。在蓄电池电压正常情况下,C1被R4、D4充电至接近蓄电池电压,这时晶闸管T3阴极由于电位较高,T3承受零电压(当T1断开时)或反向电压(当T1导通时),故晶闸管T3不导通,对电路没有影响。在蓄电池不输出的情况下,C1通过D6向负载放电,几乎放净。如果有太阳,太阳能电池有输出且超过了稳压管D4的击穿电压与C1电压的和,则晶闸管T3被加上正向电压。随着天亮后阳光强度持续上升,太阳电池的电压越来越高,当由R1、R3分压的电位较T3阴极电位高时,晶闸管T3被触发导通,则MOS管T2导通,太阳能电池向蓄电池充电,控制器得电后启动工作,C1电压逐渐升高,晶闸管T3逐渐失去正向电压,晶闸管T3关断,启动过程结束,进入正常工作状态。
4 太阳能充电程序设计
由于太阳能本身是一种不均匀的时刻变化的能量输入形式。在确认太阳能充足,充电电压足够时,才能打开充电阀门对电池充电,否则将关闭充电输入,静候太阳光充足时,再继续充电过程。太阳能充足、电压足够,是指太阳能电池的电压(即太阳能板吸收阳光后在太阳能板输出端所产生的电压)大于蓄电池电压的状态[3]。同时,蓄电池的充放电过程不宜过度频繁,折损电池寿命。因此,系统设定电池电量<90%时启动充电,充满后自动停止充电。当电压再度低于90%时又重新启动充电过程。充电控制流程如图5所示。
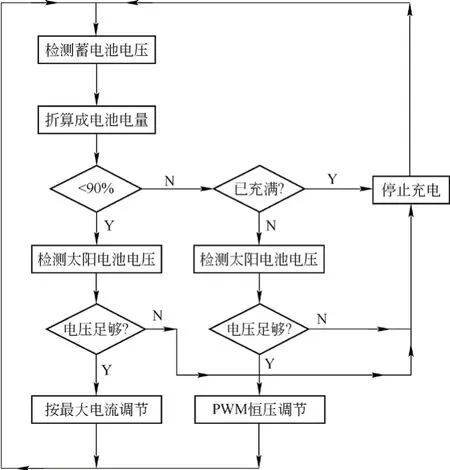
图5 太阳能充电控制流程图
充电过程分为快充和慢充两个过程,当电量低于90%时,充电处于快充模式,此时将按最大电流调节对电池进行充电,在预先设定的安全阈值内,太阳光能够提供多大的充电电流,就使用多大的电流进行充电,目的是在电池电量明显不足时,快速地对电池进行充电,提高充电效率。
而当蓄电池电量增加至介于90%~100%之间时,采用慢充,即涓流充电,此时采用的是PWM恒压调节充电,PWM恒压调节是指通过脉宽调制方法(PWM)调节太阳能电池的输出电压恒定在蓄电池充电允许的最大电压上[4],从而调节输出电压稳定在涓流充电状态,缓慢地对电池充电。已达到在电池电量接近充满时,精准控制充电过程,避免过充,保障充电安全的效果。
5 太阳能板安装角度测算
太阳能供电系统靠吸收太阳光来汲取能量,为了最大程度地获取太阳能,太阳能板的角度调节就显得尤为重要[5]。通常情况下,在正午稍后的时段会迎来太阳辐射能量的峰值时刻。因此,根据我国的总体地理位置,将太阳能的安装角度调节为南偏西15°为最佳位置。但是在索道支架上安装太阳能板时,需要辨别方向。
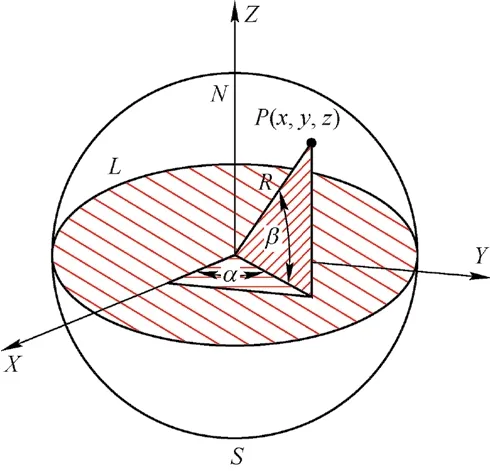
图6 坐标位置
索道线路的特性是上下站房之间的线路是一条直线,线路中所有的支架横担的朝向都是一致的,垂直于索道线路的方向。因此只要能测算出索道线路的方向,就可以获得支架横担的方向。从而在支架横担上安装太阳能板时,根据计算结果错开相应的角度,即可获得最佳安装位置。为了解决这一问题,首先要弄清楚索道线路的方向,利用定位设备可以分别获得索道上下站房的定位信息,即经纬度信息坐标。上下站房之间的连线,即为索道线路的方向。
将地球置于坐标系X、Y、Z中,球心在原点上。
地球表面有一点P,坐标为(x,y,z),其经纬度分别为α和β。显然有
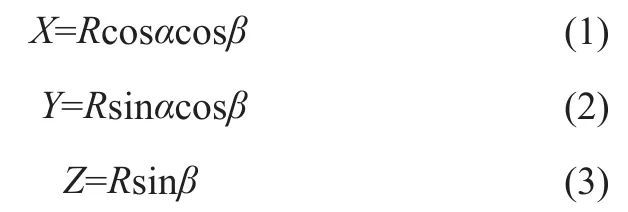
若P点移动一段位移ds,则

由于只考虑计算水平距离和水平方位,故可认为R不变,可得到
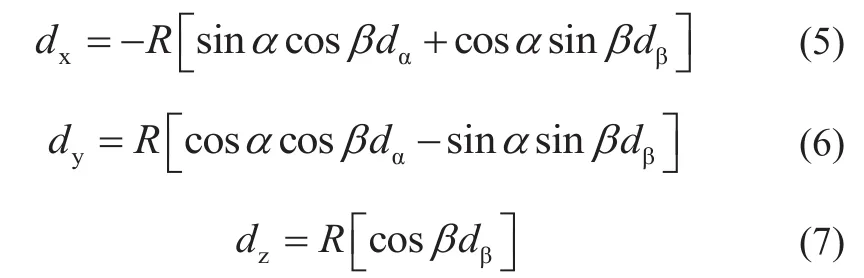
分别平方
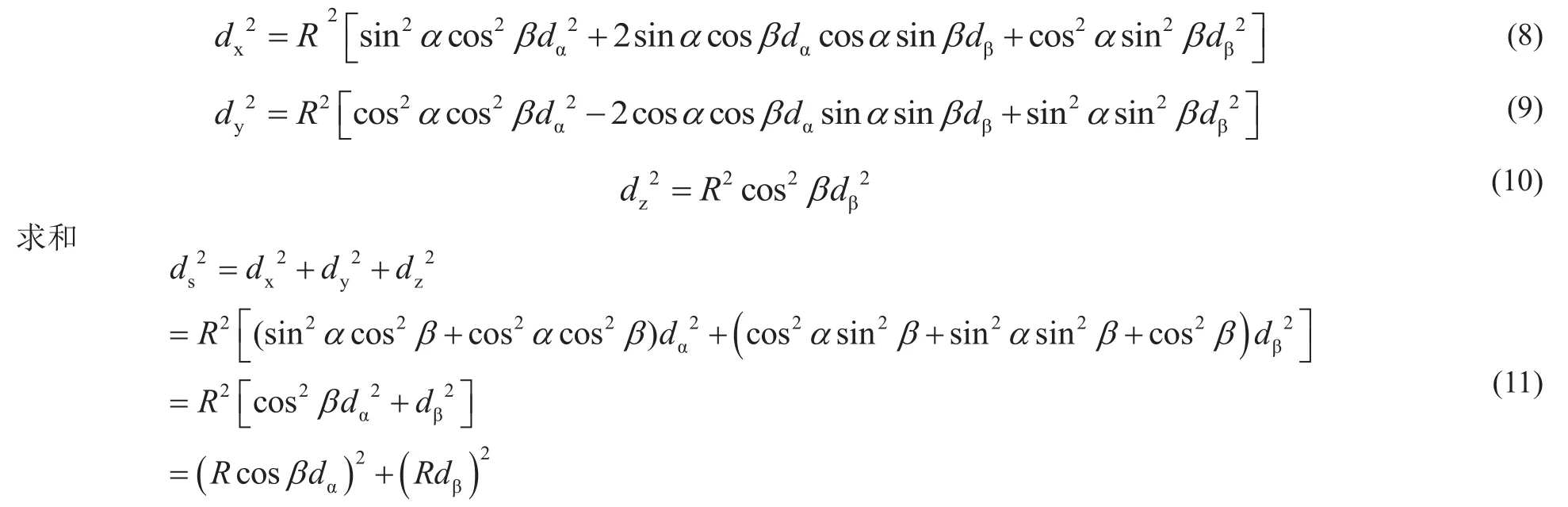
可得位移ds被分解成沿东西方向的分量Rcosβdα和沿南北方向的分量Rdβ。
式中:α、β分别是经度和纬度,dα、dβ分别是经度和纬度的变化量。
假设经过测量得到的索道下站的经纬度分别为α1和β1,索道上站的经纬度分别为α2和β2。把下站作为基点,上站的位置看做是位移,则ds为上、下站之间的距离,而dα=α2-α1、dβ=β2-β1。则此时两站之间连线与东方之间的夹角
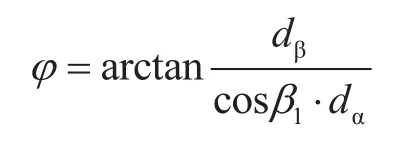
至此,即可得出索道线路的方向角度,在安装索道太阳能设备时,为了获得南偏西15°的安装效果,实际安装太阳能板的方向(即太阳能板正面汲取太阳光的方向)与支架横担之间的夹角

安装时与支架横担顺时针错开θ角度,即可获得想要的最佳安装位置。
6 结语
本文提出的基于太阳能供电原理的索道支架供电系统,能够遵守支架供电不得超过36 V的索道检验规则,节约了在索道线路上施放电缆的成本。该系统不仅能有效地为支架上的监控设备和照明设备提供电源,还能够利用通讯技术将远端支架上的设备状态实时回传,便于管理人员掌控索道信息。在设计上考虑了不同地域,不同时段,不同阳光射入条件下的应用场景,同时兼顾电池的使用寿命及太阳能板安装角度确定,达到系统效果最优化。该设计已经在多个景区及滑雪场的索道设备上得到应用,结果表明,该方案有效地解决了索道支架上的供电问题。
猜你喜欢
科学大众(2022年23期)2023-01-30
水电站设计(2020年4期)2020-07-16
劳动保护(2018年8期)2018-09-12
小哥白尼(趣味科学)(2018年4期)2018-06-21
红岩春秋(2017年11期)2017-12-07
汽车维修与保养(2017年1期)2017-05-15
汽车维修与保养(2016年1期)2016-09-07
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21
少儿科学周刊·儿童版(2015年7期)2015-11-24
