
基于UWB技术的井下快速移动目标高精度定位系统的设计与实现
2022-02-22 13:33张日明龙飞阳
物联网技术 2022年2期
张日明,周 欢,龙飞阳
(陕西山利科技发展有限责任公司,陕西 西安 710075)
0 引 言
安全生产事关人民群众生命财产安全,事关改革发展稳定大局。党中央、国务院始终高度重视安全生产工作,把安全生产纳入“四个全面”战略布局,不断加强和改进安全生产工作,推进经济社会科学发展、安全发展。树立安全发展理念,弘扬生命至上、安全第一的思想,健全公共安全体系,完善安全生产责任制,坚决遏制重特大安全事故,提升防灾减灾救灾能力。
目前,安全生产问题是各地煤矿生产工作的重中之重,由于矿井井下环境复杂、巷道纵横交错,井下作业人员、车辆流动性大,一旦发生事故,利用原有的区域定位系统难以定位到井下人员及车辆的精确位置,救援工作难度大,不仅耗费大量人力物力,更容易错失救援的黄金时间。2019年,国家八部委联合发布了《关于加快煤矿智能化发展的指导意见》,2020年、2021年国家能源局、各地发改委等部门相继发布了《煤矿智能化建设指南》等文件,文件中明确提出利用科技信息手段加快建设矿井精确人员定位系统,为井下人员安全生产提供保障。
基于UWB技术的井下快速移动目标精确定位系统利用UWB技术、AI技术、无线数据传输、自动控制技术、通信技术等,有效解决了智能矿井下快速移动的工作人员及车辆分布实时统计、入井唯一性检测、位置精确定位、智能辅运调度、智能采煤、掘进工作面精确定位等问题,对超定员生产、人员进入采空区或发现超时作业人员进行预警,为事故应急救援提供数据支撑,是煤矿安全生产的“千里眼、顺风耳、烽火台”。
1 系统研究背景
近年来,随着煤矿智能化建设的推进,对井下定位精度、频率要求更高,工程可实施性要求也更高。既要求定位技术达到先进水平,又要求能大规模工程应用,同时兼备与其他系统进行融合应用的能力,形成综合管控一体化平台,已成为矿山行业智能化建设的发展趋势。
针对井下人员多、设备多、车辆多,且井下环境复杂,存在淋水、有毒有害气体、多粉尘、浓雾气、低照度、强噪音、强电磁干扰等问题,研究具有高精度、低频率、大容量等优点的精确定位系统迫在眉睫,要求定位系统可与多系统联动,包括安全监测监控、应急广播、惯性导航、电液控制;在保障高精度定位的基础上,开发三维GIS多功能管控系统平台。可广泛用于超层越界盗采监测、遇险遇难人员定位、电子围栏、防碰撞、按需照明等场景。
2 国内外技术比较
矿井人员定位系统作为煤矿安全生产的必备系统,各开发厂家都有自己的通信协议和技术标准,导致市场产品差异极大。根据前期市场调研,人员定位产品流派较多,目前应用的定位技术有:激光、红外、超声波、惯性导航、无线电(毫米波、WiFi、RFID、ZigBee、UWB)等,其中又以基于RFID、ZigBee区域定位技术的定位产品应用最为广泛。
相比而言,基于RFID技术类产品具有低成本、易部署等优势,但在精度方面性能不足,只能实现区域定位,公用频段易受干扰;基于ZigBee技术类产品具有成本适中,融合无线通信系统的优势,但该产品利用场强定位,精度为3~10 m,且频段为公用易受干扰;本文中的矿井快速移动目标高精度定位系统采用UWB技术设计,选用高集成度板卡加304不锈钢外壳进行封装,整体重量为6 kg,便于安装维护。在性能方面,一维定位精度为20 cm、二维定位精度为30 cm、三维定位精度为50 cm,单基站覆盖半径可达600 m,1 s内并发量不少于200个目标,设备续航时间可达400 h,接收灵敏度可达-105 dBm,同时基站内部集成百兆交换模块,便于扩展,基站覆盖范围是其他定位产品的2倍。
矿井井下快速移动目标高精度定位系统是智能矿山的核心基础设施,随着2020年10月《煤矿井下人员定位系统通用技术条件》征求意见稿出台,老旧系统更新迭代迫在眉睫。未来,面向日益增长的地下空间高精度定位导航应用需求,针对当前定位技术无法实现地下大空间内人员及无人驾驶装备的精确定位导航问题,突破地下大空间复杂电磁环境下信号传输模型、数字孪生地图、规模可伸缩自主定位导航授时(PNT)系统组网、高精度定位等关键技术,研制地下大空间范围内轨道车辆、设备等的无人驾驶精确定位控制系统,开展地下大空间复杂电磁环境下自主PNT系统及导航控制应用验证,UWB高精度定位技术不可或缺。
3 系统概述
基于UWB无载波通信、无线通信、互联网及大数据等技术的矿井井下快速移动目标精确定位系统,可实现井下巷道信号“全覆盖”,及对井下人员、车辆、物料、采煤机、掘进机等目标的全程、实时、连续、厘米级精确定位跟踪。在此基础上,该系统还将高精度定位和井下各种环境传感器结合,实现了对井下环境参数、工况参数与时空位置的关联,通过一系列处理,最终在一张GIS地图上实时展现了井下综合工况。系统还提供有扩展接口,可与其他外设对接,实现对井下其他设备的远程控制及井下人员的统一调度。
系统主要由定位读卡分站、无线通信定位基站、车辆标识卡、人员标识卡、本安电源、精确定位管理系统等组成。人员精确定位图如图1所示,车辆精确定位图如图2所示。
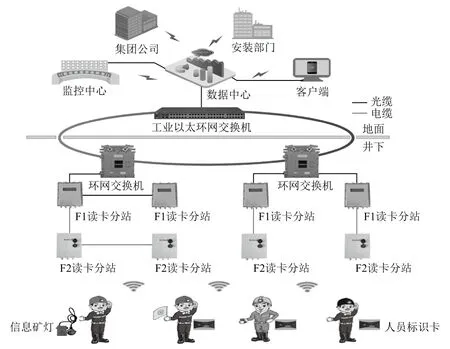
图1 人员精确定位图

图2 车辆精确定位图
4 精确定位系统的算法研究
井下采用的UWB定位系统主要由定位基站和定位标识卡等组成。定位基站或天线通常固定在巷道顶部或巷帮之上,通过光纤或网络线缆接入井下工业环网。在定位系统中会预先设置好绝对坐标系下的定位基站物理坐标。
设计2根定位天线,一根用来进行TOF测量,一根用来测量相位差,得到目标与分站的角度。借助距离和偏向角度可以计算出目标位置。
定位基站外接天线,发射UWB无线信号与佩戴在人员身上或安装在车辆之上的定位标签通信,通过信号到达时间(Time of Arrival,TOA)、到达时间差(Time Difference of Arrival,TDOA)、到达角度(Angle of Arrival,AOA)等,确定移动节点的位置信息。
时间算法测距,由定位基站计算TOF并折算为距离。到达时间差算法结合平面、立体几何方程进行定位,由定位基站记录各自收到定位报文的TOA(到达时间),由定位引擎计算关联定位基站的TDOA,再根据一维定位、二维定位、三维定位的不同算法定位目标。
AOA用于获得固定节点与移动节点之间的方位信息。
(1)飞行时间定位
TOF测距方法利用信号在2个异步收发机之间往返的时间来测量节点间的距离。UWB可使用双向飞行时间法(Two Way-Time of Flight,TW-TOF)测距。每个节点从启动开始即生成一条独立时间戳信息。TW-TOF定位原理如图3所示,发射端在T时刻发射信号,接收端在T时刻接收信号,并在T时刻返回信号,T时刻信号又到达发射端。

图3 TW-TOF定位原理
发射端与接收端的距离为:
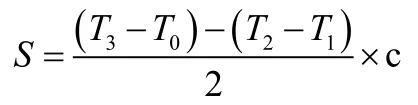
式中,c为光速。
三维定位需要移动标识卡至少与3个定位基站进行测距,测距完成后进行位置计算,如图4所示。

图4 TOF定位示意图
(2)到达时间差
基于到达时间差定位法需要定位系统具备精确时间同步功能。定位基站时间同步后,移动标识卡发送一个广播报文,基站收到后,标记接收到此报文的时间戳,将移动标识卡ID和时间戳发送到定位引擎,定位引擎整合其他基站的定位报文时间戳,计算出被定位目标的位置,结合软件滤波算法判断标识卡的行动轨迹和方向,如图5所示。

图5 TDOA定位示意图
实现TDOA定位的难度在于标识卡与基站之间为单向通信,若要获得准确的距离差信息,基站间必须保持优于纳秒级的高精度时间同步。
(3)到达角度
UWB-AOA定位方案已有许多研究成果和硬件解决方案。AOA定位最少借助2个定位基站和1个标识卡完成,也可以通过基于TOF、基于TDOA、基于PDOA(Phase Difference of Arrival,PDOA)方案以及TDOA/PDOA混合方案。其中,基于PDOA的方案提供了最高的角度测量精度。
基于PDOA的AOA估计原理如图6所示。信号路径长度的差别(p)与天线A和B之间的距离(d)和到达角度(θ)有关:

图6 基于PDOA的AOA估计原理
p=d sin(θ)
空间相位差PDOA(α)与p之间的关系如下:

PDOA 与到达角度(θ)的关系如下:

公式推导过程中假设天线A和B具有相同的辐射方向图,且到达2个天线的波束平行,但这只有在天线阵列互耦效应可忽略不计、标识卡与天线足够远的情况下才能实现。当 d<λ/2时,到达角度(θ)与PDOA有[-π/2,π/2]之间的一一对应关系。
根据TOF、TDOA、AOA等各定位算法(不少于5 000次)的重复定位误差,分析误差分布以及误差与定位距离、时钟误差、遮挡效应等因素的相关性,找出适合煤矿井下精确定位的算法,根据煤矿井下应用场景特别是狭长空间内精确定位的需求改进算法,并分析计算每一种定位算法的单次定位时间及每一种定位算法的最大并发量。
5 系统性能与技术指标
定位精度高:精确定位精度,一/二/三维为20/30/50 cm;容量大:单基站每秒处理卡85以上(TOF),基站范围内识别并发量超300张;通信距离远:地面空旷区域卡站通信距离1 200 m,井下半径最远800 m(考虑可靠性,井下大巷实际距离800 m);高可靠性:服务器主备部署,主机故障时,备机自动接管,具有双机热备等功能,可以做到异卡异频。考虑系统功耗情况,针对人卡可以做到1 s或2 s传输一次,车卡可以0.1 s传输一次。
系统技术指标:实现对井下人、车的姿态判断,例如人的运动、静止判断,判断车辆停止、前进、后退、怠速、上坡、下坡等状态;多技术融合的定位技术、定位网络拓扑、定位算法;智能电源远程供电:智能电源远程供电2 km,具备远程管理功能,可从地面实时查看井下电源情况、远程充放电等;芯片自带纽扣电源,断电后可以续航3 h,标识卡电池一次充电工作时间超60天,可与矿灯同步,传输误码率小于10,传输速率大于6.8 Mb/s;管理系统支持桌面版和移动版,可随时随地监控对象,真正实现全方位、全时空关注运营安全;以物联网、大数据和云计算为技术支撑,架设故障分析预警平台,实现智能化监控和预警。
6 结 语
本文从矿井安全生产、应急救援和保障人员生命财产的角度出发,系统分析了当前矿井井下快速移动目标的定位问题,解决了区域定位系统存在的弊端,提出了基于UWB技术的矿井下快速移动目标精确定位系统的设计与实现。系统可以实现对矿井轨道无人驾驶车辆、井下作业人员、井下运输车辆、掘进工作面、综采工作面的高精度定位,真正为井下作业人员、车辆安全生产活动保驾护航。
猜你喜欢
中国煤炭工业(2019年1期)2019-06-17
经济技术协作信息(2018年22期)2019-01-19
北京航空航天大学学报(2017年9期)2017-12-18
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
语文世界(小学版)(2015年12期)2016-01-22
山东冶金(2015年5期)2015-12-10
电源技术(2015年2期)2015-08-22
第二课堂(小学版)(2015年4期)2015-06-18
河南科技(2014年11期)2014-02-27
