
船舶喷涂机器人双闭环控制研究与运动仿真*
2022-02-23 05:30刘子儒刘雪梅刘丽君邓啸尘
机械制造 2022年1期
□ 刘子儒 □ 刘雪梅 □ 杨 振 □ 刘丽君 □ 邓啸尘
1.同济大学 机械与能源工程学院 上海 201804 2.上海外高桥造船有限公司 上海 200137
1 研究背景
船舶制造过程中,喷涂是极其重要的环节,可用于保护船体钢材免受海水腐蚀[1]。不同于已经广泛普及的汽车自动化喷涂[2],船舶喷涂有着工作空间大、喷涂质量要求高等特点,目前大多采用人工喷涂,装备机械化、自动化水平还有待提升。
目前,大型船舶自动喷涂机器人主要分为轨道式、爬壁式、移动机械式三类[3]。Navarro等[4]设计了轨道式三自由度船体喷砂系统,对复杂表面的适应性较弱。Cho Cheseung等[5]提出基于视觉系统的永磁爬壁喷涂机器人,在曲面喷涂方面存在一定局限性,并且视觉误差较大。哈尔滨工业大学团队研制的液压展臂式移动喷涂机器人具有工作空间大、喷涂灵活的特点,但液压展臂刚度对末端喷涂质量有较大影响[6-8]。
上述三类机器人都存在一定的局限性。笔者的研究对象为3P6R桁架式机器人,这一机器人在提供超大工作空间的同时,六自由度机械臂还可以对复杂曲面进行多角度喷涂。多自由度、长行程机器人在运动过程中更容易受到外部冲击扰动影响,带来误差,仅靠传统单闭环控制方法,无法达到精度的要求。对此,笔者设计了关节角度与末端位置双闭环控制系统,通过Adams软件与MATLAB软件进行联合仿真试验,验证双闭环控制系统的正确性与有效性。Adams软件是一款多体动力学仿真软件,可以对复杂机械系统进行运动学、静力学、动力学分析。MATLAB软件是当今应用最广泛的控制系统仿真软件,Simulink是其重要的模块,提供了控制系统建模与仿真环境。将两者在各自领域的优势结合起来,可以为复杂系统的研究带来巨大便利[9-12]。
2 船舶喷涂机器人运动仿真模型
2.1 建模
由于船舶待喷涂表面的大小远大于单个六自由度机械臂的工作空间,因此船舶喷涂机器人采用具有三方向平移自由度的桁架带动RX160L六轴机械臂实现空间运动,机械臂每个关节均由伺服电机驱动控制。船舶喷涂机器人三维实体模型如图1所示。
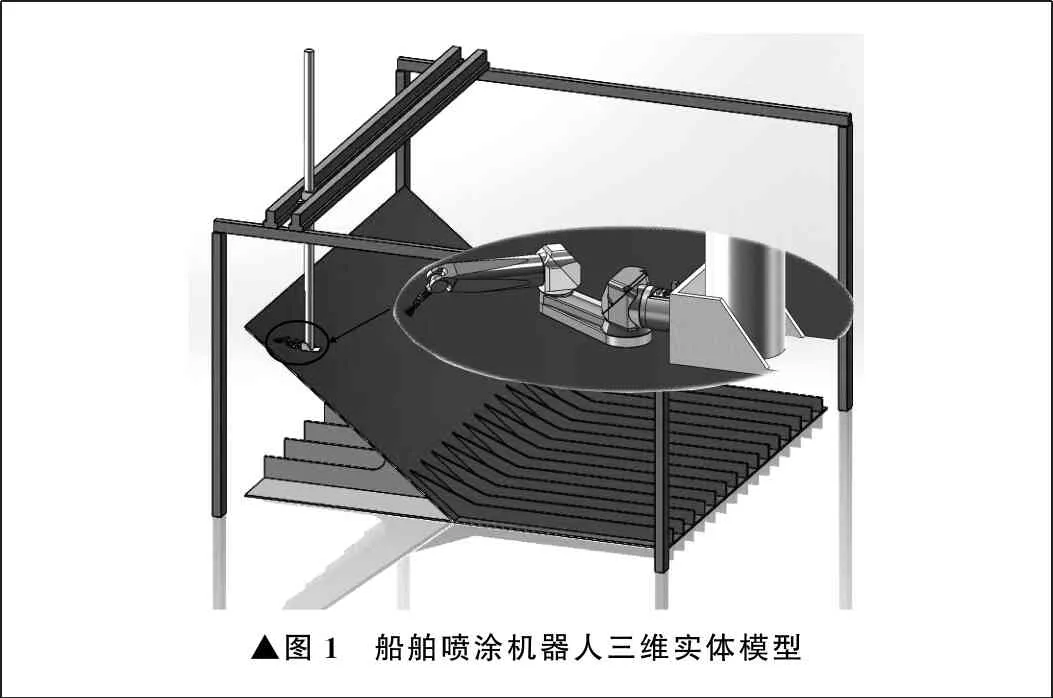
▲图1 船舶喷涂机器人三维实体模型
应用Adams软件对船舶喷涂机器人进行运动学与动力学仿真。将船舶喷涂机器人三维实体模型由Solidworks软件导入Adams软件,对每个零件逐一进行配置,定义材料为钢,对机械臂关节角、平动桁架进行旋转副与平移副运动约束,对不参与运动的部件施加固定副,使其与地面保持固定约束。船舶喷涂机器人Adams软件运动仿真模型如图2所示。
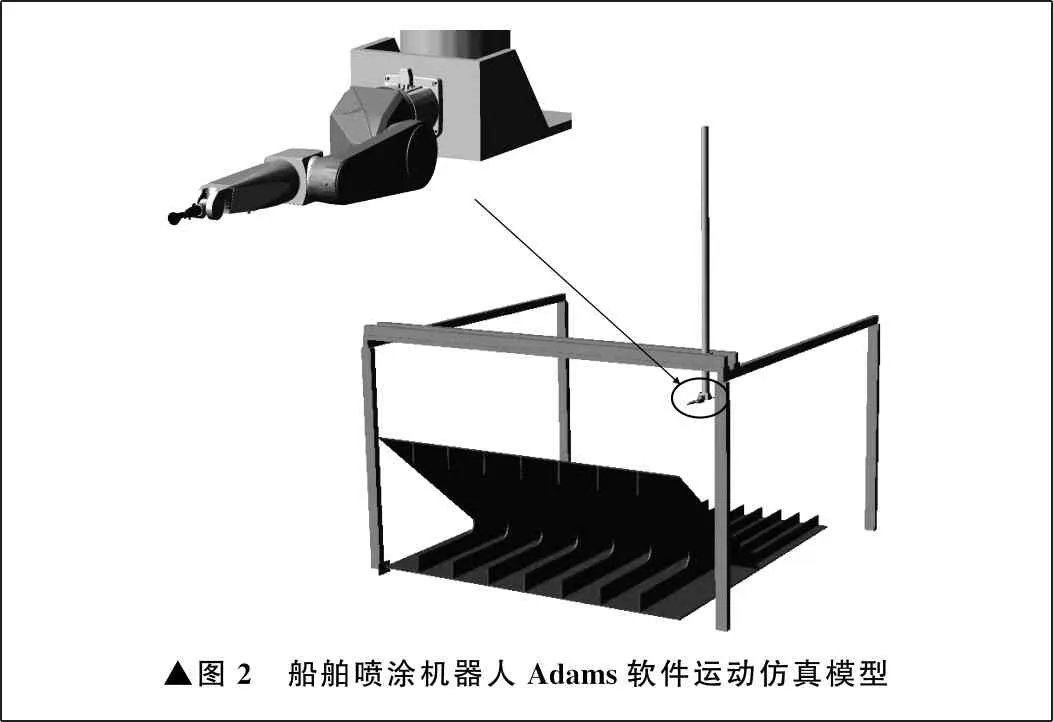
▲图2 船舶喷涂机器人Adams软件运动仿真模型
2.2 验证
由于船舶喷涂机器人较为复杂,为了保证模型搭建的正确性,对每个旋转及平移关节施加旋转或平移驱动来进行模型验证。
对桁架的三个方向施加平移驱动,驱动函数为d=Asint,其中d为桁架位移,A为位移幅值,t为时间。A分别设为100 mm、200 mm、300 mm。对机械臂的六个关节施加旋转驱动,驱动函数为a=Bsint,其中a为关节转动角度,B为转动幅值。B分别设为10°、20°、30°、40°、50°、60°。设置完毕后进行仿真,仿真结果如图3所示。由图3可以看出,机械臂的六个关节均按预先期望轨迹运动,说明船舶喷涂机器人运动仿真模型搭建正确,可以进行下一步联合仿真。
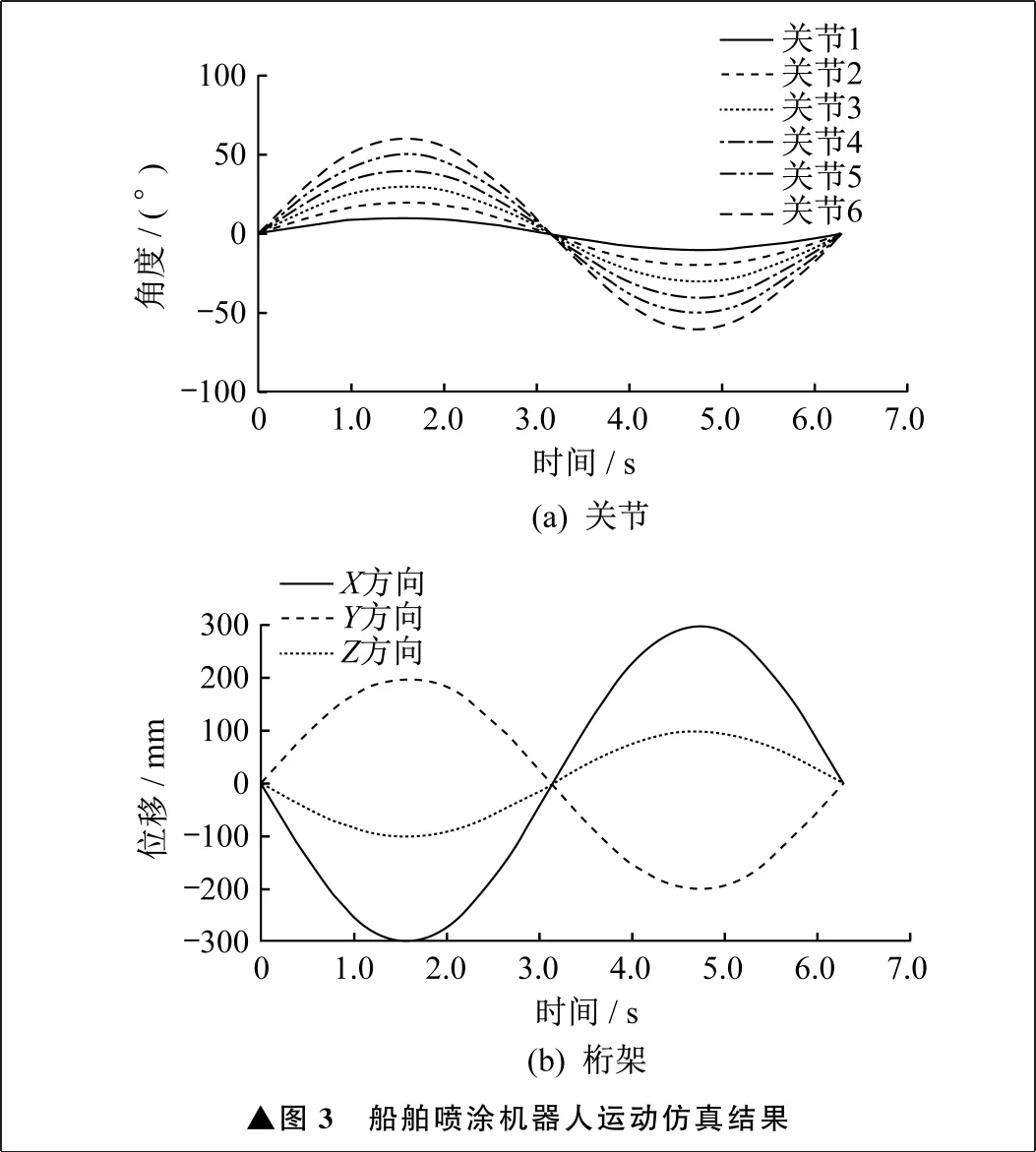
▲图3 船舶喷涂机器人运动仿真结果
3 船舶喷涂机器人控制系统
3.1 架构
船舶喷涂机器人的工作空间较大,容易产生累计误差,传统比例积分微分位置闭环无法消除稳态误差的影响。一般情况下,考虑添加前馈控制以消除稳态误差。实现前馈的必要条件是确定被控对象传递函数的倒数,对类似机械臂的复杂机电系统而言,确定传递函数非常困难。此外,在伺服电机闭环外产生的冲击扰动也无法被快速准确地响应和消除。对此,笔者在原有电机闭环的基础上增加末端位置闭环,从而形成双闭环控制,以确保整体的精度要求。船舶喷涂机器人总控制框图如图4所示。内环为伺服电机关节位置闭环,通过运动控制器保证各关节的位置精度。外环为机械臂末端位置闭环,将末端位置误差通过分配算法补偿至内环,减小内环的稳态误差,从而使喷枪末端以合适的距离与姿态进行喷涂作业。
3.2 伺服电机闭环
笔者的研究对象为吊装式串联机器人,只要控制各关节达到规划的角度或位移,便可使末端执行机构以所需的姿态到达目标位置。因此,对各关节的角度位置控制成为最基础、最重要的必要条件。船舶喷涂机器人伺服电机闭环控制框图如图5所示。从机械臂末端规划开始,经过运动学逆解,反求出各关节角度规划后,与编码器读取的实际关节角度反馈做差,输入运动控制器,再由控制器发出指令,驱动关节转动至精确的角度位置。
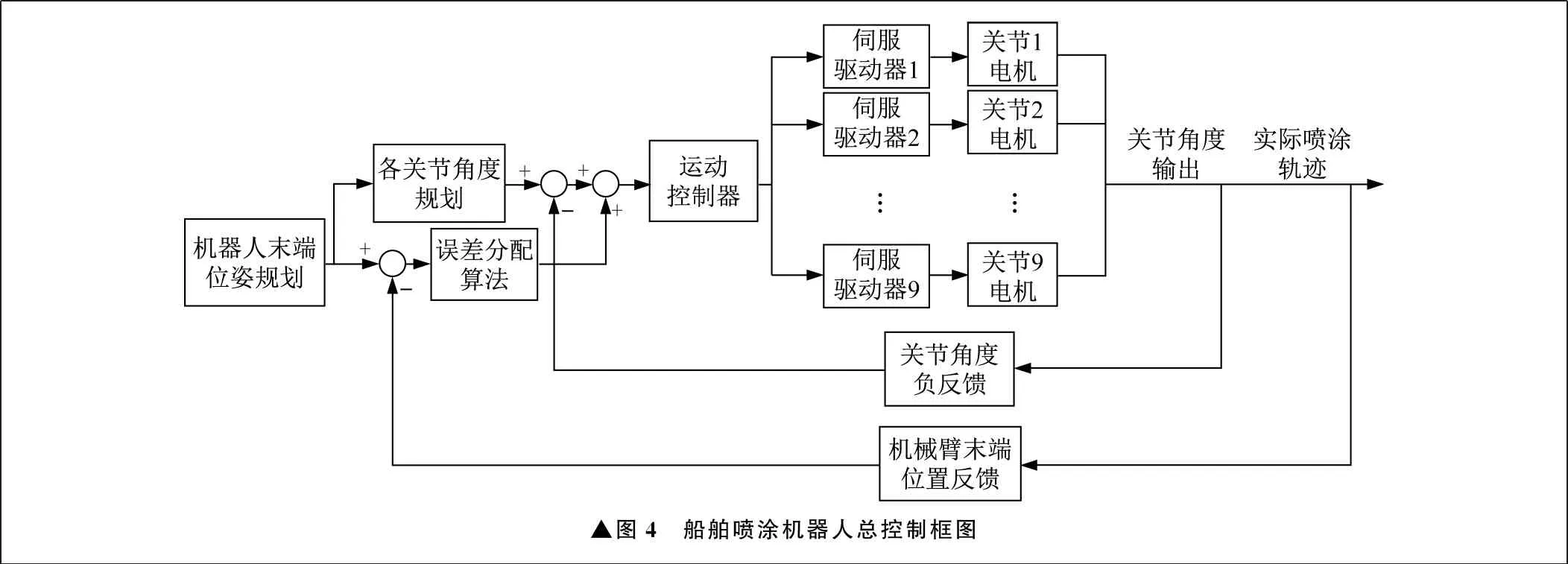
▲图4 船舶喷涂机器人总控制框图
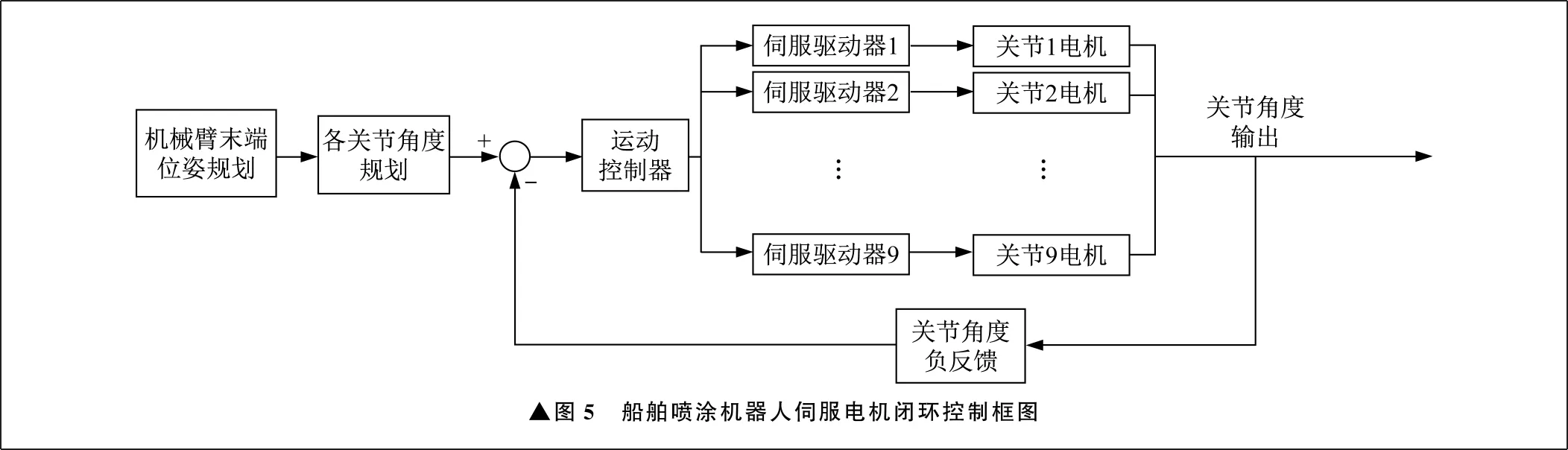
▲图5 船舶喷涂机器人伺服电机闭环控制框图
运动控制器采用经典比例积分微分控制,通过MATLAB软件中自带的PID Tuner模块实现对参数的整定。
3.3 机械臂末端位置闭环
虽然串联机器人电机闭环能够保证各关节角度精准、稳定地达到期望目标,但是一旦在编码器读取节点之外出现冲击扰动,单闭环控制系统无法对这一误差产生响应,更无法快速、准确地将其消除。针对这一问题,搭建了机械臂末端位置闭环反馈,原理是通过期望的机械臂末端位置与实际读取的末端位置反馈做差,得到X、Y、Z三个方向上的误差,通过误差分配算法分别传入机械臂的六个关节角度误差,一同作为偏差信号输入比例积分微分控制器。
末端闭环仅控制机械臂六个关节的原因有两点。第一,六轴机械臂提供了足够的自由度来修正末端喷头的位置。第二,桁架运动中具有很大的惯性。希望船舶喷涂机器人在一个相对平稳的状态下运动,同时消除冲击扰动带来的误差,高精度的机械臂是首选的控制对象。
船舶喷漆机器人外环误差分配原理如图6所示。将期望的喷涂轨迹与机械臂末端位置在X、Y、Z三个方向上做差,所得的偏差分别乘以6组18个分配因数x1~x6、y1~y6、z1~z6,并与电机内环中的关节角度误差相加,生成新的偏差信号,作为内环比例积分微分控制器的输入。通过试凑法调整分配参数,使关节稳定收敛于一个微幅改变的角度值,从而抵消或者消除扰动冲击带来的误差,保证机器人末端仍满足原先的位置规划。这一方法可以在不进行二次运动学逆解的情况下,基于现有冲击扰动带来的误差重新生成一组关节角度的期望值,来保证末端位置的精准。
4 联合仿真实现与分析
搭建联合仿真平台,研究双闭环控制系统在船舶喷漆机器人运动过程中展现的作用与效果。
4.1 联合仿真平台搭建
联合仿真平台基于Adams软件、MATLAB软件进行搭建。Adams软件与MATLAB软件的输入、输出如图7所示。Adams软件通过虚拟传感器读取机器人各关节角度、桁架位移及末端执行器的空间位置,传入MATLAB软件。控制器计算得出虚拟电机的输出力矩,传入Adams软件,使模型发生期望运动。

▲图6 船舶喷涂机器人外环误差分配原理
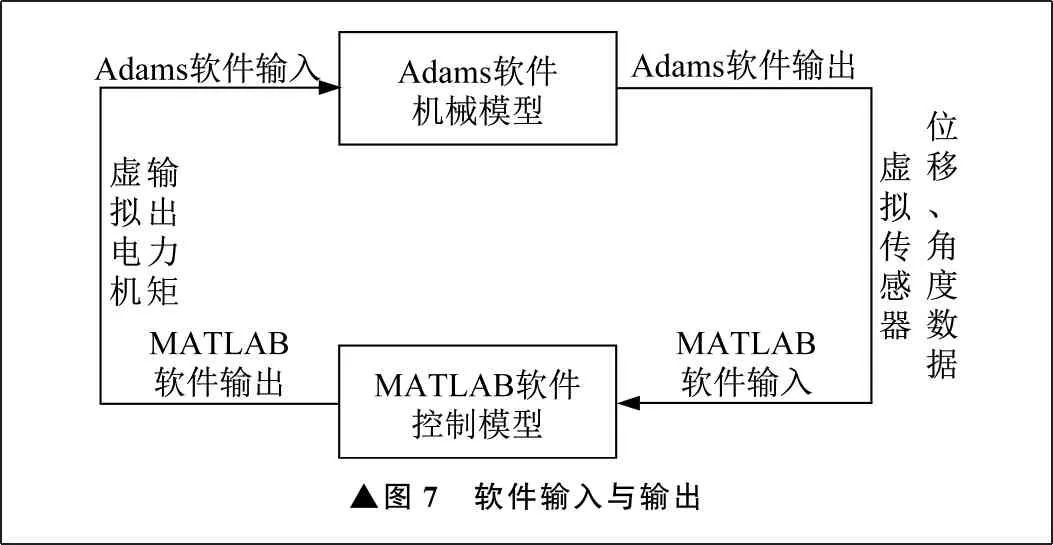
▲图7 软件输入与输出
为了实现联合仿真,首先需要在Adams软件中创建输入与输出变量,用于接收和传出数据。设置虚拟传感器,用于采集六个关节角度、桁架三个方向的位移及执行器末端空间位置,共计12个输出变量。相对应在桁架三个方向上设置作用力,在机械臂六个关节上设置作用力矩,共计9个输入变量。然后将Adams软件中配置完成的船舶喷涂机器人力学模型通过Adams Controls模块导出为MATLAB软件Simulink模块中的子模块。运行生成.m文件后,在MATLAB软件中输入指令:adams_sys,Simulink模块中便会生成船舶喷涂机器人的机械力学模块。
4.2 控制系统仿真试验
船舶分段喷涂对象主要为平面,通常采用弓字形路径作为喷涂轨迹,如图8所示。仿真试验采用弓字形路径进行喷涂作业。喷涂过程中,船舶喷涂机器人易遭受外界的冲击扰动,致使末端产生位置误差,因此在仿真试验中,预先设置X方向1 mm的误差。
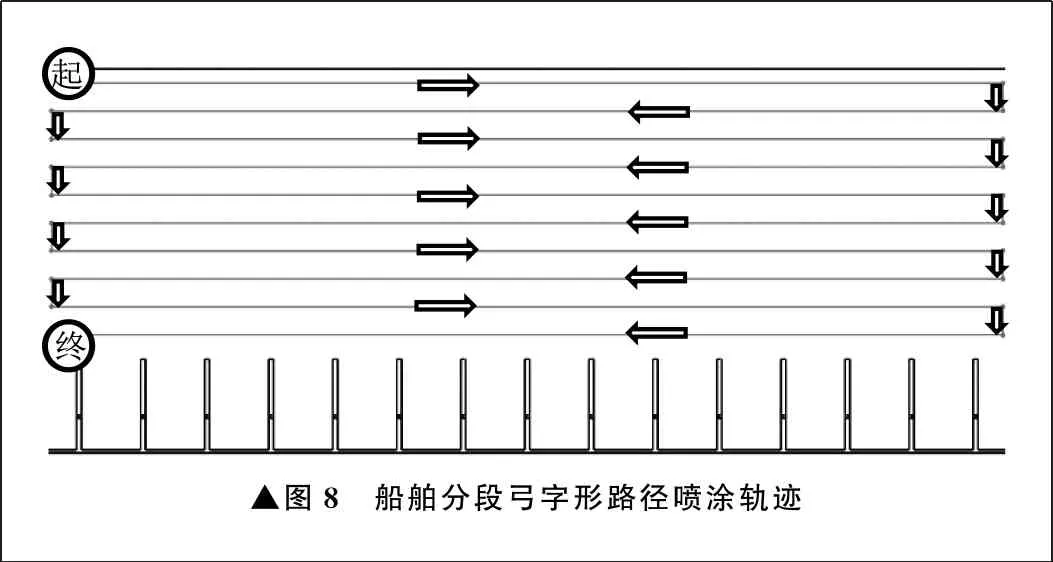
▲图8 船舶分段弓字形路径喷涂轨迹
在大范围移动时,主要由桁架带动船舶喷涂机器人运动,机械臂提供的自由度主要用于修正末端喷枪的空间位姿。工作过程中,希望船舶喷涂机器人末端保持匀速运动,从而达到较好的喷涂效果。
对伺服电机的内环模型进行仿真,在MATLAB软件Simulink模块中搭建的控制系统如图9所示。比例积分微分整定采取MATLAB软件自带的PID Tuner模块。由于该模块仅支持线性模型的比例积分微分参数自整定,因此先由Adams软件导出线性系统模型,然后在该模块中调节响应时间与鲁棒性,得到比例积分微分参数。将整定好的参数应用于非线性模型仿真,得到伺服电机内环仿真结果,如图10所示。
由图10可知,船舶喷涂机器人的桁架及各关节角度跟踪精度较好,但是对末端处产生的误差无法响应,同时在起停点与弓字形拐点处产生了较大误差,给最终喷涂效果带来影响。
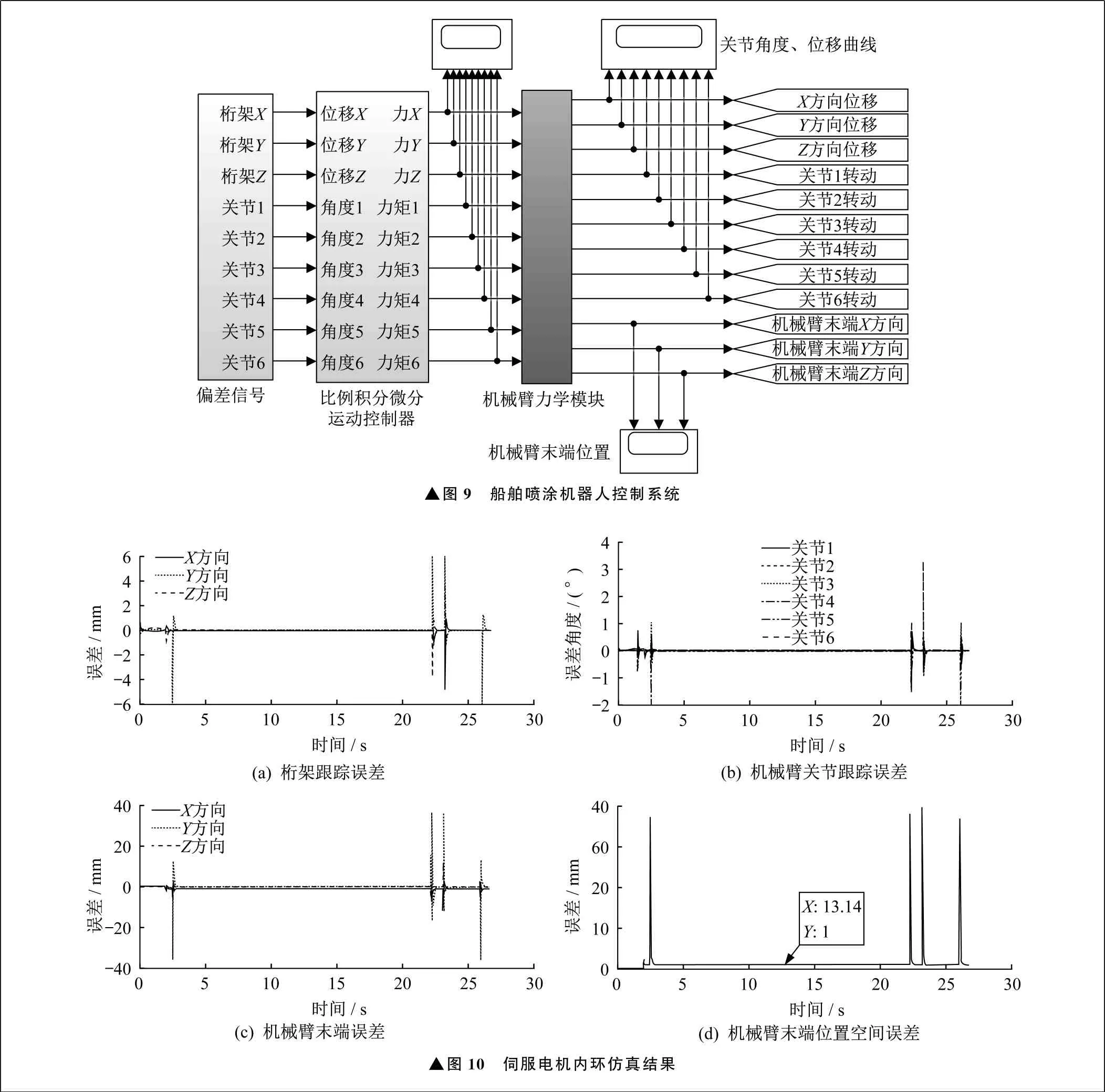
▲图9 船舶喷涂机器人控制系统▲图10 伺服电机内环仿真结果
针对内环控制系统存在的问题,搭建基于机械臂末端位置的外环控制,控制系统框图如图11所示。这一控制系统的本质是在存在干扰冲击的情况下,在很小的范围内重新寻找一组机械臂关节角度的值,使机械臂末端按照既定工作轨迹继续运动,避免再次求解机器人逆解,做到动态控制,实时修正。
配置好外环的误差分配因数后,进行仿真,双闭环控制系统抗干扰仿真结果如图12所示。
系统进入稳定状态后,外环控制将机械臂末端在X方向上的误差由设置的1 mm减小至0.18 mm,误差消除率达82%。空间误差也由试验设计的1 mm减小至0.325 mm,误差消除率为67.5%。由此证明双闭环控制方案能有效抑制、消减由内环编码器节点外发生的干扰冲击带来的末端误差。
4.3 轨迹优化对运动控制影响
由双闭环试验结果可知,在起停点及弓字形拐点处依然存在较大的波动,原因是船舶喷涂机器人在上述工作点加速度发生突变,导致理想力矩也随之发生突变,由此使比例积分微分控制器产生较大波动。因此,对原喷涂轨迹从两方面进行优化。

▲图11 机械臂末端位置外环控制系统框图
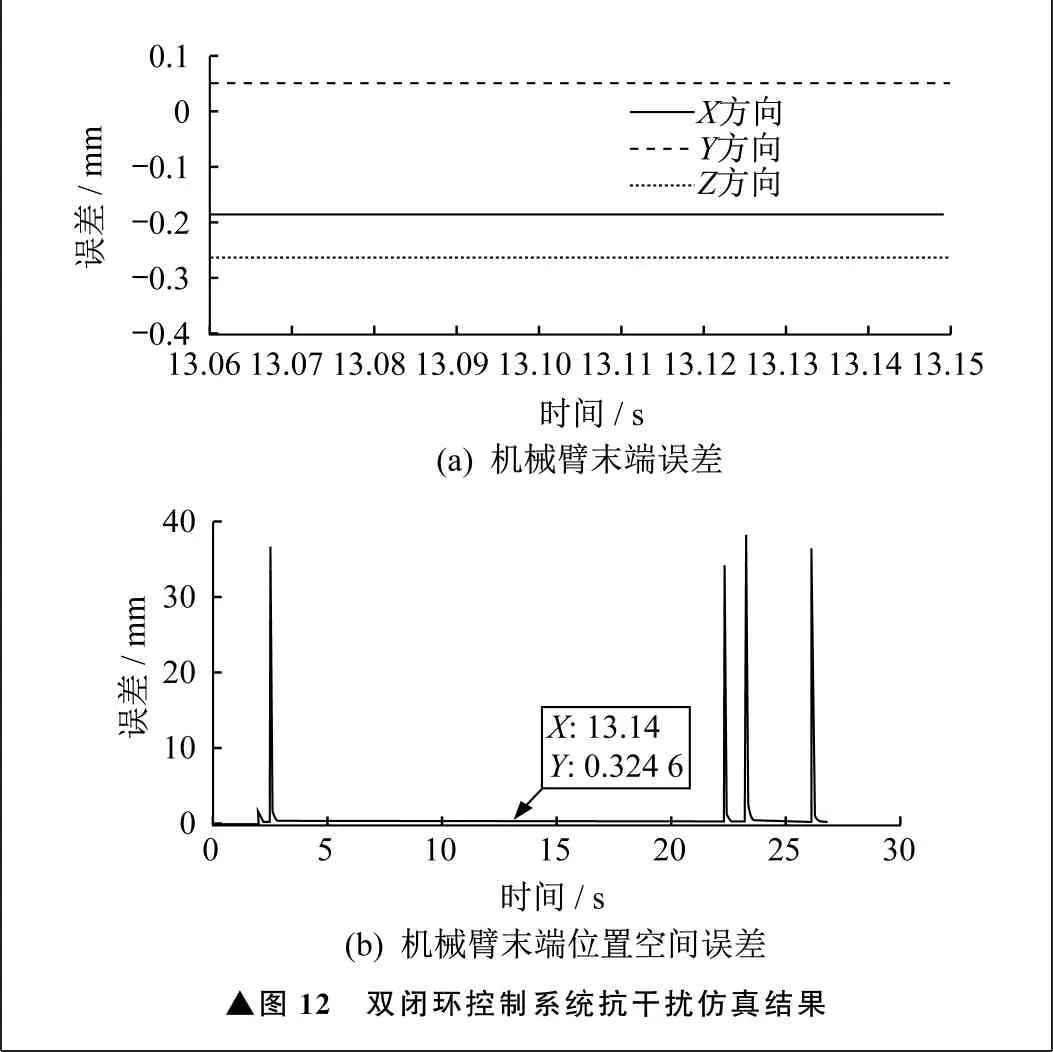
▲图12 双闭环控制系统抗干扰仿真结果
弓字形拐点处的速度、加速度突变是由两者方向上的变化导致的,对此,采用圆角化的方法避免速度、加速度方向发生突变。弓字形拐点处的轨迹优化如图13所示,图13中点划线为原喷涂路径,实线圆弧为优化后喷涂路径。

▲图13 弓字形拐点处轨迹优化
起停点处的误差由加速度数值突变造成,对此增加一个基于加速度正弦函数的加速过程,使速度从零平稳地过渡至1.5 m/s匀速状态。原轨迹规划中存在尖点,速度在此处不可导。优化后桁架在X、Y、Z方向的速度曲线如图14所示,速度连续且光滑。
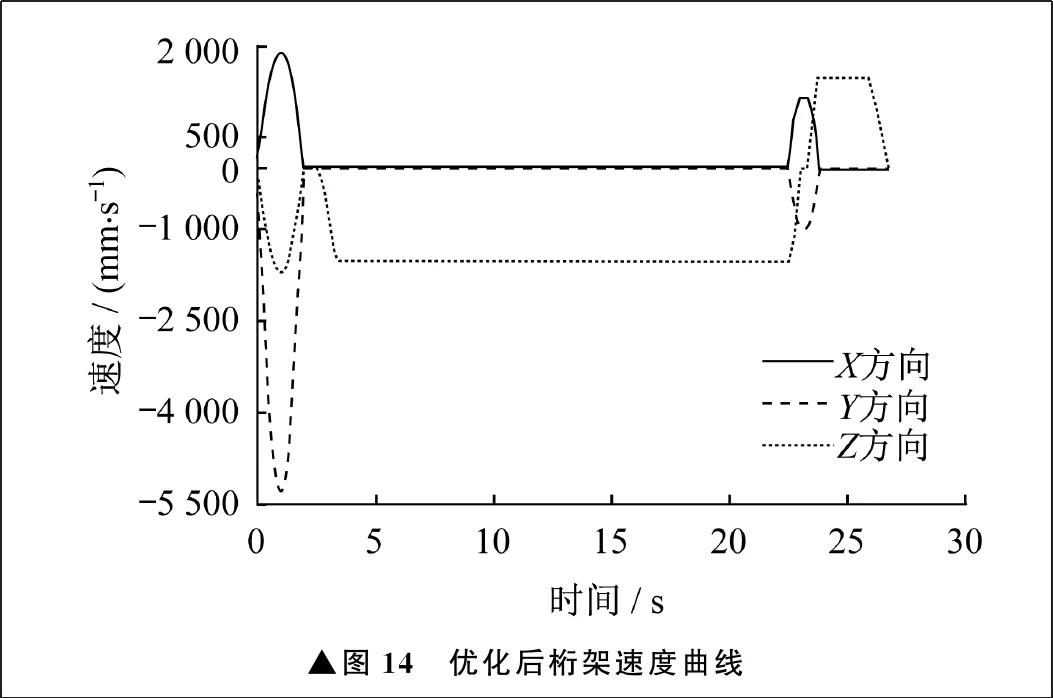
▲图14 优化后桁架速度曲线
沿用之前试验中的控制系统参数,对优化后的轨迹进行仿真试验,得到优化后机械臂末端位置空间误差,如图15所示。船舶喷涂机器人在起停点与弓字形拐点处的误差波动均大幅度减小,空间误差极大值由40 mm减小至2.5 mm,误差消减率为93.75%。

▲图15 优化后机械臂末端位置空间误差
5 结束语
笔者借助Adams软件与MATLAB软件搭建了一个联合仿真试验平台,验证了双闭环控制系统的正确性与可行性,优化了控制参数与轨迹,使复杂的船舶喷涂机器人在可视化的仿真环境下高效率地进行验证优化,节约了时间与开发成本。
控制系统的外环使船舶喷涂机器人能够在内环编码器节点外受到扰动冲击的情况下依旧保证末端位置精度,使船舶喷涂机器人稳定运行。
当然,还存在一些尚待解决的问题。外环的控制参数整定较为困难,目前采用手动整定的方案,且文中的数据不一定是最优解,后续将引入机器学习的方法自动整定参数。实际应用中,船舶喷涂机器人末端的视觉伺服采样频率远低于内环电机的频率,导致加入外环后系统的响应时间增加,反而不利于控制。之后将借助联合仿真平台重点研究在现有传感器技术下如何加快系统的响应速度。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
建材发展导向(2021年9期)2021-07-16
建材发展导向(2021年6期)2021-06-09
建材发展导向(2019年5期)2019-09-09
电子制作(2018年11期)2018-08-04
电子制作(2017年17期)2017-12-18
水能经济(2017年6期)2017-10-19
电脑知识与技术(2016年18期)2016-11-02
大学教育(2016年7期)2016-07-27
腹腔镜外科杂志(2016年12期)2016-06-01
