
分布式电传飞控系统稳定储备试验
2022-02-25 14:55屈宗源
科技信息·学术版 2022年8期
稳定性是控制系统的基本要求,是指在去掉作用于系统的干扰后,它能够以足够的精度恢复到初始平衡状态的能力。稳定性的定义反映了对控制系统的三个要求:一是必须能恢复,二是能快速恢复,三是回复状态与初始状态有高度的一致性。在飞控系统中的优异的稳定性是良好飞行品质的必要条件。在飞控系统设计中,通常通过增益裕度和相位裕度来表征飞控系统的稳定性。
建模与仿真技术的发展,为通过数字仿真来研究和评估飞控系统稳定性创造了很好的条件,也为此做出了很大的贡献。但是,由于仿真计算增益和相位裕量需要考虑的因素众多,诸如:制造公差,稳定的和不稳定的气动影响和结构模态,计算通道中的模拟或数字的输入和输出滤波器造成的相位滞后,采样速率和综合技术,热效应,降级构型,部分液压失效。且飞机系统机载设备多,结构复杂,尤其像液压伺服舵机及其液压能源,很难建立精准的数学模型,也很难实现复杂模型下的实时仿真。因此,在飞机验证阶段需要通过试验来进行验证系统的稳定性满足设计要求,通过“稳定储备试验”来验证和评估飞控系统稳定储备也显得尤为重要。
某型飞机飞控系统采用分部式架构,系统以多余度飞行控制模块(FCM)、作动器控制电子(ACE)、远程电子单元(REU)为核心处理部件构建的数字式电传飞行控制系统,向飞机飞行提供正常控制功能;同时了防止ACE的共模故障,系统还配备了使用模拟控制电路的辅助飞行控制单元(AFCU)提供备份控制,该设备可以在4台ACE同时失效时保证对主操纵面(副翼、方向舵、升降舵)的控制,实现飞机的安全飞行和着陆。
系统共有四个工作模式,其中正常工作模式和降级工作模式的控制律由FCM生成,通过数字总线将控制指令经由各ACE转发到对应的REU,由REU控制作动器执行指令;正常工作模式是系统默认的工作模式,正常模式控制律可实现控制增稳、纵向自动配平、边界保护、姿态保持等功能。在外部信号缺失或系统内设备故障时,系统进入降级工作模式,在该模式下系统结合直接角速率传感器(DMRS)提供的角速率信号生成控制增稳的降级模式控制律。直接工作模式的随襟翼状态调参的比例控制律由各ACE生成,通过数字总线将控制指令发送到对应的REU,由REU控制作动器执行指令;备份控制功能的比例控制律由AFCU生成,通过模拟信号将控制指令传递到对应的REU,由REU控制作动器执行指令。直接模式和备份控制模式的控制律均为开环的比例控制。基于飞控系统的功能及状态,系统的闭环稳定性验证试验只需覆盖飞控系统正常工作模式和降级工作模式,系统的直接模式和备份控制模式只需进行开环动态性能测试即可。
在以往的电传飞控系统的稳定性测试中,多采用断开系统测量系统的开环频率响应,得到系统的开环传递函数的方法。但因为本飞控系统纵向通道具备有自动配平的功能,如采取开环的方式进行稳定性的测试,会因为积分器的漂移导致测量的数据难以分析。在系统研制初期,在桌面仿真中通常可以通过断开积分器,将系统断开,测量系统的开环传递函数。但是在系统集成阶段,断开积分器过于复杂且没有必要。所以对于本系统采用闭环叠加干扰信号的方式来进行稳定储备的测试。
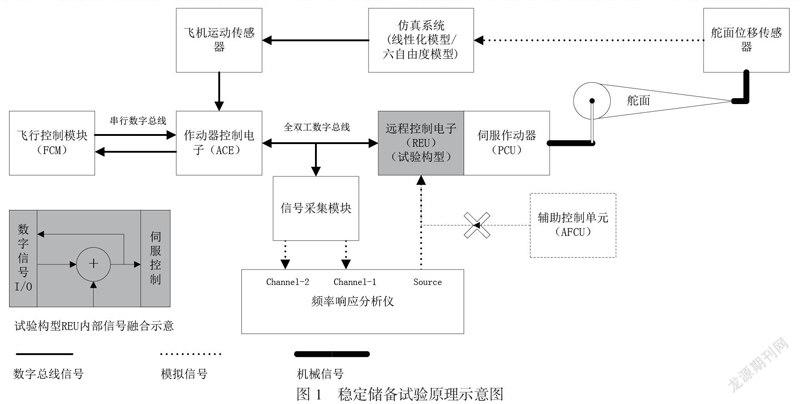
在进行系统稳定储备时,系统外部通过飞控系统控制面上的舵面位移传感器,将舵面的运动状态输入到飞行仿真系统,飞行仿真系统运行飞机的六自由度运动模型或小扰动线性化运动模型,解算出飞机的姿态角、三轴角速率、加速度等参数,再通过物理效应器驱动飞机运动传感器产生信号(或直接将信号注入飞控系统)注入飞控系统,达到系统与飞机闭环。在飞行仿真系统设置不同的飞机构型及飞行状态,并将飞机配平在设定的飞行状态下。用动态频响分析仪产生正弦扫频信号注入飞控系统。通过将REU中的可编程逻辑替换为“试验构型”状态,使正常系统闭环内的指令信号与经由AFCU口输入的外部扫频信号进行融合,达到在系统注入扰动的目的。融合后的信号会通过“控制反馈信号”经由双工数字总线回传到系统。由于系统采用分部式架构,相较于传统飞控系统,可以很方便的将ACE与REU之间的数字信号进行解析,得到系统下发给REU的控制信号及REU的控制反馈信号。通过总线信号采集模块将“控制信號”和“控制反馈信号”采集,并通过数/模转换为模拟信号分别接入频响分析仪的两个分析通道。如图1所示。
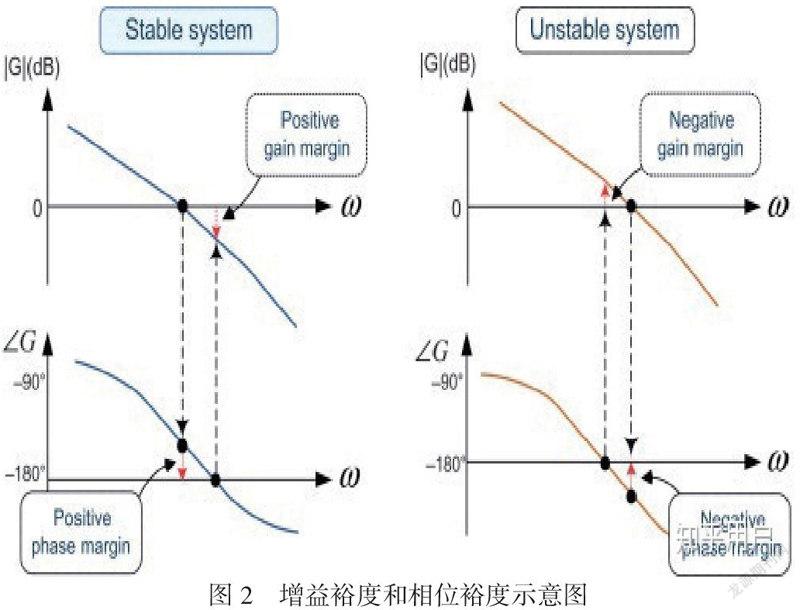
通过频响分析仪绘制出“控制信号”相对于“控制反馈信号”的Bode图。找出幅频曲线达到0dB点及相频曲线达到180°的点。幅频曲线达到0dB的频率在相频曲线上对应的点距-180°的距离即为相位裕度,相频曲线达到180°的频率在幅频上对应的点距0dB的距离即为增益裕度,如图2所示。
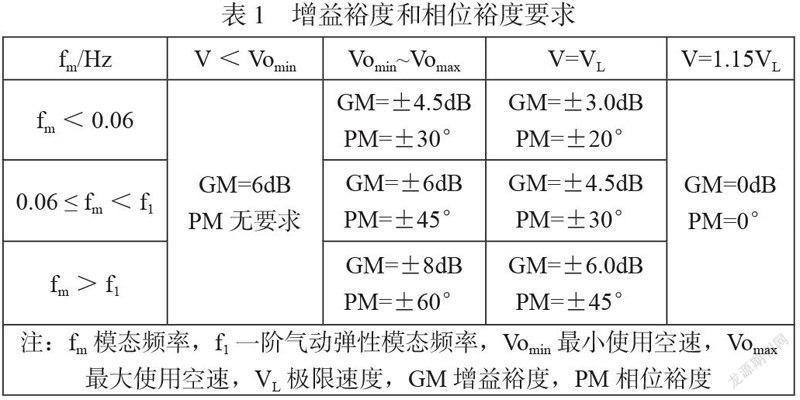
按照国内外相关标准,系统的增益裕度和相位裕度应满足表1。
在稳定储备试验中,需要选择合适的激励幅值和飞机的状态点,合适的幅值可尽量减少非线性因素的影响,且不会使系统的任何环节处于饱和状态。具有代表性的飞机状态点可以覆盖整个飞行包线,确保整个飞行包线内的飞行安全。除了系统正常状态下的稳定性测试以外,也应考虑系统故障/非正常工作情况下的测试,如:整个控制回路中对于气动和大气数据的不确定性的状态,系统的余度降级和余度失效的状态,液压源系统因为余度故障、非预期的流量和压力、冲击、振动等不正常状态的影响。
除了考虑飞控系统的稳定性以外,同时也应保证飞控系统不会与飞机结构产生不利的耦合。特别是确保飞控系统外部传感器(惯性基准/航姿基准等)的安装位置能最大限度地降低/避免因飞机装载状态及状态变化引起的振动等在内的结构模态耦合(SMI),并有安全的敏感性裕度。在进行结构模态耦合试验时,也可以采用相同的试验方法,在SMIT中只需将仿真系统的“飞行动力模型”替换为“弹性飞机模型”即可。
通过稳定性试验,验证了系统满足操纵面速率、铰链力矩和刚度的要求。操纵面的速率是充分的,是可以满足的飞控系统的稳定性要求。并且整个系统的时间延迟不会造成不可接受的相位滞后,飞控系统的增益大小合适,不会在使用范围内造成系统的发散。飞控系统外部传感器的安装位置合适,且系统的各种模态不会与结构产生不利的耦合,
参考文献:
[1]MIL-HDBK-516C AIRWORTHINESS CERTIFICATION CRITERIA
[2]JSSG-2008 Joint Service Specification Guide, Vehicle Control and Management System
[3]GJB2191—1994,有人驾驶飞机飞行控制系统通用规范
[4]大型运输飞行控制系统试验技术 高亚奎、安刚、支超有等[著]
作者简介:屈宗源 (1991.12-- ) 男 汉族 籍贯:江西九江 职称: 工程师 学历:本科 研究方向:飞行控制系统设计
猜你喜欢
电子乐园·下旬刊(2021年3期)2021-02-08
大众科学·中旬(2020年6期)2020-06-29
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
领导文萃(2019年8期)2019-04-19
新农业(2018年3期)2018-07-08
电机与控制学报(2018年9期)2018-05-14
分析化学(2018年12期)2018-01-22
求知导刊(2017年22期)2017-10-13
