基于负荷均衡的飞机驾驶舱动态功能分配
2022-02-25 01:47
测控技术 2022年1期
(南京航空航天大学 民航学院,江苏 南京 211106)
随着飞机驾驶舱自动化水平和智能化水平的提高,驾驶舱人机界面变得越来越复杂,飞行员和自动化系统的交互也变得越来越复杂,飞行员在驾驶舱中的任务逐渐由手动控制转向监督控制,飞行员的工作负荷也由体力负荷逐渐向认知负荷转变[1]。研究表明飞行员的认知负荷过高或过低都不利于飞行员发挥最佳工作状态,当飞行员认知负荷过低时,会丧失情景意识,不能对突发事件做出快速响应,而当飞行认知负荷过高时容易产生差错,导致飞行事故发生[2-3]。因此,为了适应复杂动态的任务环境,提高飞机的飞行安全性,需要进行驾驶舱动态功能分配,即根据飞行员状态、系统工作状态和外界环境状态动态调整飞行员和自动化系统之间的任务分配,从而发挥人和自动化系统的最大工作效能[4]。
Johnson等[4-5]分析了功能分配的4种角度,即以技术为中心(Technology-Centered)、以人为中心(Human-Centered)、团队导向(Team-Oriented)和工作导向(Work-Oriented),指出了功能分配需要关注的问题,分析了正常和非正常进近着陆阶段的人机结构和飞行员飞行监控动态任务分配。Kaber等[6]研究了信息处理过程的4个不同阶段的静态自动化,Parasuraman等[7]讨论了10种不同的自动化等级,并且详细列出了4个不同阶段人和自动化处于何种等级。Liu等[8]研究了自适应自动化系统的设计,从认知角度对驾驶舱人机界面设计提出了构想,张安等[9]给出一种认知负荷计算模型,并应用于动态功能分配中。工作负荷的实时测量评估对动态功能分配至关重要,生理测量设备的发展使得通过监测眼动、心率、呼吸等生理特征来预测人的脑力负荷成为可能[10]。
综上所述,国内外对飞机驾驶舱功能分配的研究主要集中在功能分配原则、触发方式、动态功能分配评估指标、操作程序的设计、自适应自动化系统的设计等方面,在实际飞机驾驶舱中还没有实现真正的动态功能分配,对动态功能分配的研究主要是概念设计、仿真和静态分析,即依据某种原则将某功能分配给人或自动化,缺少从动态角度研究动态功能分配过程中人和自动化的变化情况。
本文在自动化等级分类法基础上,面向未来智能飞机驾驶舱提出了动态功能分配方法。为了使功能分配更加合理准确,需要融合多种信息。模糊综合决策、贝叶斯网络、层次分析法等可以解决多元信息的融合决策问题,由于飞行员工作负荷的量化评估具有模糊性和不确定性特点,对飞行员工作负荷的定义和计算在业界没有统一定论。此外,贝叶斯网络和层次分析法需要较多客观准确的数据,而模糊综合决策能较好地处理模糊数学问题。因此,本文设计模糊推理系统,通过模糊推理调整驾驶舱的自动化等级,在Simulink中建立了任务需求参数、任务负荷、飞行员生理特征参数和工作负荷及自动化等级之间的映射关系模型,验证了该方法的可行性。
1 飞行员工作负荷量化预测方法
1.1 飞行员工作负荷量化预测体系
本文从飞行员工作负荷构成的角度,结合飞行员生理特征测量,构建考虑客观任务需求和飞行员自身行为的飞行员工作负荷量化预测体系,如表1所示。
1.2 工作负荷量化计算模型
飞行事故主要由飞行员脑力负荷和疲劳造成[8],因此本文选择脑力负荷和疲劳作为飞行员工作负荷的指示器。将表1中的评估指标与脑力负荷和疲劳建立映射关联,即可对飞行员的工作负荷进行量化计算。

表1 飞行员工作负荷量化预测体系
飞行员工作负荷的指示器脑力负荷和疲劳分别用W和F表示,工作负荷评估指标分为两类,其中,X={x1,x2,…,xn}表示飞行员的生理特征指标集,如眨眼率、瞳孔直径、呼吸深度、心率、EEG、ERP等,Y={y1,y2,…,yn}表示飞行员的任务需求指标集,如环境复杂度、操作复杂度、人机界面支持、任务时间等。W和F采用两层求解框架,W={w1,w2},F={f1,f2},如图1所示。
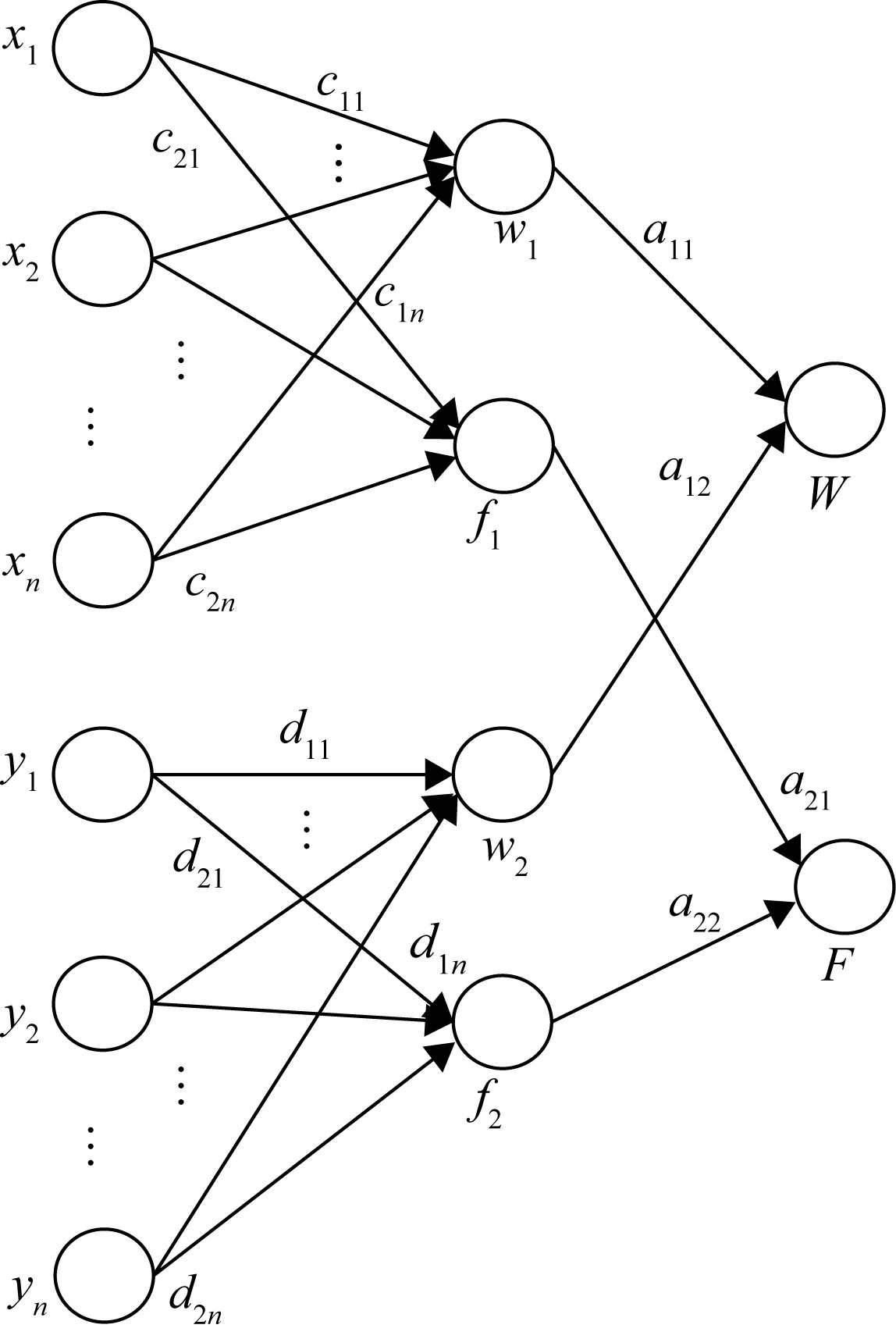
图1 飞行员工作负荷求解框架
为方便问题求解,作出以下假设。
假设1:工作负荷评估模块中输入的与W和F相关的评估指标都已经做了正向化、无量纲化预处理,取值范围为[0,1],指标值越大,W和F越高。
假设2:任务分析模块中输入的除时间之外的参数都经过了正向化、无量纲化预处理,取值范围为[0,1],指标值越大,任务需求产生的工作负荷越高。采用线性加权的方法计算求解W和F,计算公式如下:
(1)
(2)
式中:a11,a12,a21,a22分别为图1中w1,w2,f1,f2相对于W和F的权重;c1i,c2i分别为生理参数指标值相对于w1,f1的权重;d1i,d2i分别为任务需求指标值相对于w2,f2的权重;f(·)为将时间和任务需求指标值关联起来的飞行员疲劳函数关系。
2 动态功能分配模型
2.1 动态功能分配结构框架
驾驶舱动态功能分配需要解决3个维度的问题,动态功能分配的结构框架如图2所示[5]。
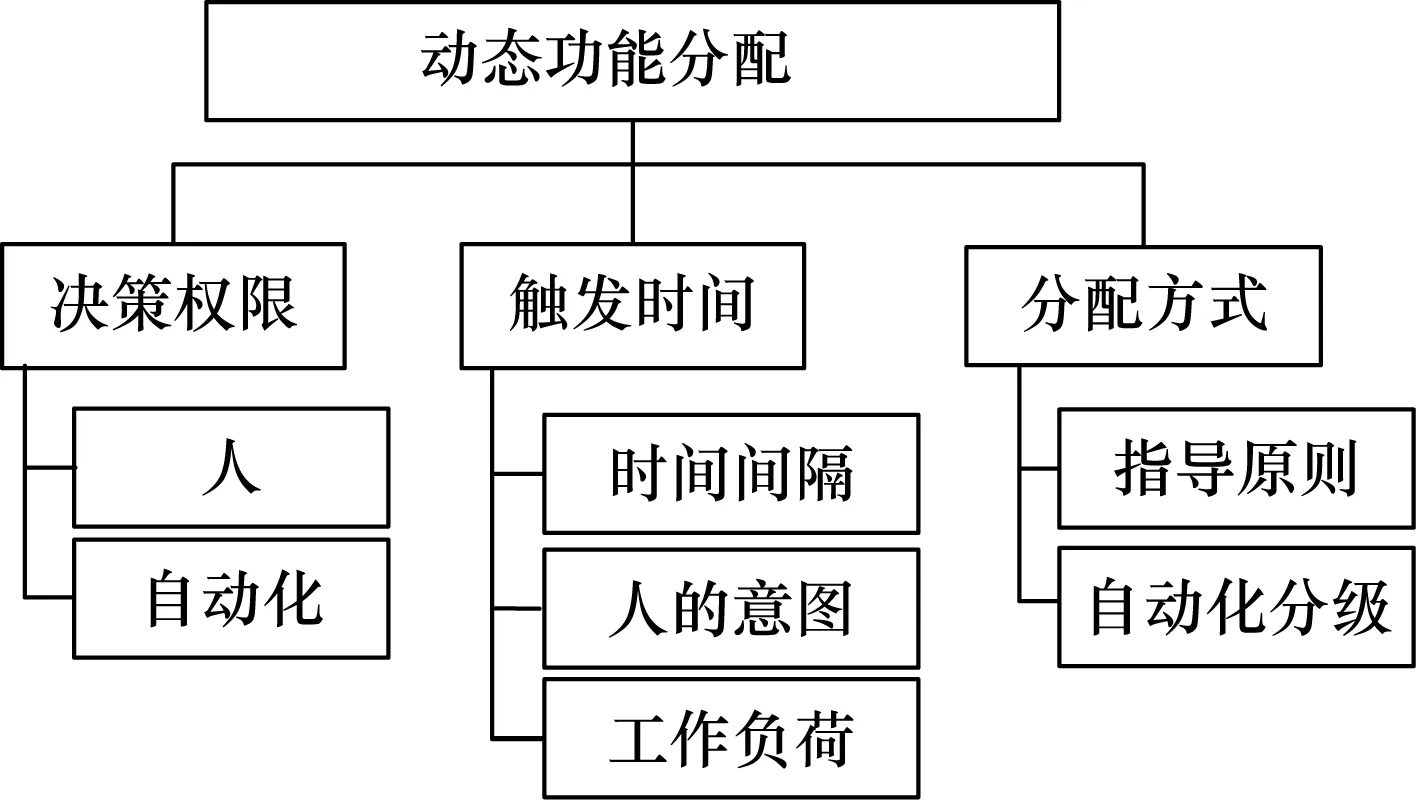
图2 动态功能分配结构框架
① 决策权限。即谁来触发功能再分配。当功能再分配的决策权交给人的时候,人可能因为工作负荷过高或处于失能状态无法及时触发功能的再分配;交给自动化系统时,若自动化系统不透明,可能会造成人的不理解,严重时会诱发飞行事故。研究表明人和自动化系统共同拥有不同程度的决策权限时,可以达到比较好的效果[5]。
② 触发时间。即何时触发功能再分配。常见的触发方式有3种,一种是按照一定时间间隔,不考虑外界环境和系统状态,但是这种方式只适合巡航阶段等任务不变的情况;另外两种则是自动化系统根据人的状态触发,当检测到人不想做当前任务时或人的工作负荷过高时,则触发任务的再分配。
③ 分配方式。即按照什么原则以怎样的方式进行功能再分配。Fitts[11]最早提出按照人机能力对比的原则进行功能分配,即让人和自动化系统做各自擅长的任务,Billings[12]提出要按照以人为中心的指导原则,让自动化系统作为飞行员的辅助工具,更好地发挥飞行员的工作效能。这些原则都表明自动化应该可以被预测、理解,只在必要的情形下被使用。在动态功能分配中分配采用自动化等级分类方式来表示人和自动化系统的不同程度的任务分工。
2.2 动态功能分配实施过程
飞机驾驶舱动态功能分配是在静态功能分配的基础上实施的,在静态功能分配阶段,根据外界环境、飞行阶段和系统状态设计各种飞行场景,制定各种飞行场景下的操作程序,进行任务分析,通过人机特性对比,细化人和自动化系统各自的功能和任务,确定自动化方案集,即各种飞行场景下从手动操作到全自动操作的自动化等级集,这是实现动态功能分配的前提;在动态功能分配阶段,飞行员和自动化系统通过驾驶舱人机界面进行交互,外界环境和系统状态等信息会通过驾驶舱人机界面呈现给飞行员,驾驶舱人机界面也会获取飞行员生理特征信息,根据外界任务状态和当前的自动化等级分析飞行员的任务负荷,通过对飞行员生理状态和当前任务负荷的分析预测飞行员的工作负荷,调用知识库中的规则自动调整当前自动化等级,调整飞行员工作负荷。飞机驾驶舱功能分配实施过程如图3所示。

图3 飞机驾驶舱功能分配实施过程
2.3 模糊推理过程
模糊推理将专家的经验知识转化为模糊规则[13],使用模糊集来表示语言变量。
飞机驾驶舱动态功能分配实施过程中最关键的一步是通过模糊推理过程输出最适合当前飞行员工作状态的自动化等级。
模糊推理过程按以下3个步骤执行。
(1) 确定模糊集和模糊隶属度函数。
将脑力负荷(W)、疲劳(F)、自动化等级(Level of Automation,LOA)这3个模糊量都划分为4个等级,用模糊语言“低”、“中”、“高”、“非常高”表示,分别对应等级符号“L”、“M”、“H”、“VH”,假定模糊语言变量的隶属度函数均为三角型,为了求解方便,模糊值进行了标准化处理,取值范围为[0,1]。参考文献[6]确定语言变量模糊集的范围如表2所示。
(2) 确定模糊规则。
模糊规则用if-then的形式描述如下:
If (脑力负荷 is L) and (疲劳 is L) then (自动化等级 is L);
If (脑力负荷 is L) and (疲劳 is M) then (自动化等级 is M);
……
(3) 去模糊化。
常用的有最大隶属度法、重心法和加权平均法,本文采用重心法去模糊化。

表2 语言变量及模糊集表
3 仿真分析验证
3.1 仿真实验设置
选取巡航阶段进行仿真分析,仿真时间为6000 s。仿真模型包括6个模块:外部输入模块、飞行员生理特征模块、脑力负荷分析模块、疲劳分析模块、模糊推理模块、任务分析和再分配模块。仿真模型图如图4所示,图中Y模块是信号发生器,用来产生外部输入,X模块产生飞行员生理特征参数,在每个模块的输出端口设置示波器即可观察测到各模块的动态变化过程。

图4 仿真模型图
3.1.1 外部输入模块设置
外部输入模块用来产生客观任务需求,选取环境复杂度y1和操作复杂度y2进行仿真分析,其定义及与脑力负荷和疲劳的关系如下。
① 环境复杂度(y1):当飞行员面对不同的飞行环境,如雨雪天气、风切变、紊流、近地等情况,由于环境复杂度不同,会给飞行员操纵飞机带来的不同程度的工作负荷。环境复杂度越高,飞行员承受的脑力负荷越高;环境复杂度不会直接导致疲劳程度增加,但是对疲劳的增长速率有影响,环境复杂度越高,疲劳程度增长越快。
② 操作复杂度(y2):飞行员在不同的飞行阶段或者应对不同的飞行任务时,其操作动作的难度和操作的动作数不同;当自动化系统主动为飞行员分担一些任务时,飞行员的工作量会减轻。操作复杂度越高,飞行员的工作负荷越高。
设置t=0 s时,y1和y2分别为0.4和0.3;t=2000 s时,y1和y2分别增加到0.9和0.7。由于2000 s之前飞行任务强度较低,2000 s时突然受到紊流影响,环境复杂度增加,导致操作复杂度也随之增加,飞行员任务强度达到了很高的级别。
3.1.2 飞行员生理特征模块设置
飞行员生理特征模块模拟飞行员的生理特征指标随当前任务负荷的变化情况,生理指标能够反映脑力负荷和疲劳的程度,本文选取3个生理指标进行分析,其定义及工作负荷的关系如下。
① 呼吸率(x1):每分钟呼吸的次数,通常x1越高,脑力负荷越高,x1与疲劳的关系不明显。
② 眨眼率(x2):每分钟眨眼的次数,通常x2越低,脑力负荷和疲劳程度越高。
③ 心率频率比(x3):心率变异性中的低频信号与高频信号的频率比,通常x3越高,脑力负荷越高,x3与疲劳的关系不明显。
3.1.3 自动化等级定义
采用自动化等级定义的方法定义飞机驾驶舱的人机功能分配,归一化之后的自动化等级的描述如表3所示[6]。当飞行员的工作负荷较低时,自动化等级较低,决策权限交给飞行员,自动化为飞行员提供不同程度的辅助;当飞行员工作负荷过高,无法及时应对当前任务时,决策权限转交给自动化,自动化为飞行员提供不同程度的通知和提醒,自动执行任务;只有当飞行员处于失能状态时,自动化等级才会变为1级,此时任务全部由自动化承担。

表3 自动化等级描述
仿真设置的初始LOA为0.2,表示飞行员采用自动驾驶模式,飞行员的主要任务是监控驾驶舱显示界面上各种飞行参数,并观察驾驶舱外的环境状态。
3.2 结果分析
仿真结果如图5所示。2000 s后由于飞行任务强度突然增加,x1,x2,x3出现了不同程度的增长,W增长明显,F增长不明显。这是由于飞行任务强度的增加对W的影响较大,而F受飞行时间影响较大,仿真结果与实际情况相符。

图5 仿真结果图
2000 s后驾驶舱系统通过对飞行员生理特征和飞行任务的分析,预测出W较高,将LOA提高到0.4,此时自动化系统通过显控界面告诉飞行员当前最佳的应对措施,并且征求飞行员的意见,飞行员由于自动化系统的辅助,W很快下降到中等负荷水平0.6并保持稳定水平,x1,x2,x3也有了不同程度的下降并且处于一个稳定水平。
F随着飞行时间的增加总体呈现增长的趋势,这是由于飞行员的疲劳有累积效应,飞行时间越长F越大,在4000 s时,F达到了“高”等级0.8,触发了LOA的增加,随着LOA从0.4调整到0.5,自动化系统通过显控界面告诉飞行员当前最佳决策,待飞行员确认后自动执行决策,这使得W进一步降低,F的增长得到抑制,并以更慢的速率增长。
综上,仿真结果中对飞行员脑力负荷和疲劳的仿真预测与实际情况相符,自动化等级的调整综合考虑外界任务需求和飞行员的生理状态变化,对任务需求和生理状态的变化反映灵敏,可以迅速调整到一个适当值,有效降低飞行员脑力负荷,抑制疲劳的增长速率;自动化等级的调整能够在较长时间内保持飞行员脑力负荷处于稳定水平,但是不能完全降低飞行员的疲劳,只能抑制疲劳的增长速率。
4 结束语
从工作负荷构成和飞行员生理行为特征两个方面建立了飞行员工作负荷预测体系,给出了基于脑力负荷和疲劳的两层工作负荷量化求解框架,能够更准确地预测飞行员负荷状态;将任务需求分析、飞行员生理特征、工作负荷预测、基于模糊推理的自动化等级调整方法集成到Simlulink模型中,实现了动态功能分配的仿真分析,自动化等级的动态调整过程表明了该动态功能分配模型的有效性、灵敏性和稳定性。
猜你喜欢
北京大学学报(自然科学版)(2022年4期)2022-08-18
发明与创新(2022年19期)2022-06-13
社会科学战线(2022年2期)2022-03-16
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
时代英语·高一(2018年4期)2018-09-14
小天使·一年级语数英综合(2018年1期)2018-06-22
时代英语·高一(2016年4期)2016-09-21
小猕猴学习画刊(2015年4期)2015-05-05
小猕猴学习画刊(2015年3期)2015-04-07