基于工程约束与权重优化的民机部段柔性调姿算法实现
2022-02-25 01:40
测控技术 2022年1期
(上海飞机制造有限公司,上海 201324)
随着我国飞机装配技术的持续发展,飞机装配技术已经从传统的人工装配,渡过半自动化装配,进入了数字化装配进程,并在持续应用过程中形成了一套完整的数字化装配技术体系[1]。飞机装配是一项涉及多学科、多领域的集成性技术,它具有技术难度大、复杂程度高的特点,而且也对飞机产品的制造成本、生产周期和装配质量有着重要的影响[2]。飞机装配的工作量较其他产品不同,占比高达飞机制造总工作量的50%~60%左右,而一般的机械制造中装配的工作量只占到总工作量的20%左右[3]。
为研究飞机部段调姿与对接过程,搭建调姿对接实验平台,面向对接试验平台开展了相关调姿算法、运动等方面的研究[4]。相关研究基于现有成熟软件与数控系统,完成算法优化,模拟调姿。
民用飞机部段的调姿与对接采用柱式或塔式数控定位器,每台定位器与机体部件单独相连,由伺服电机驱动在3个方向上移动,用于支撑、调姿、对接飞机大部段[5]。飞机自动对接系统架构如图1所示,通过激光跟踪仪进行建站,将局部坐标系与全局对应。对比测量点与数模理论位置,通过测量与姿态解算软件解算姿态并反馈对应旋转矩阵。按照工程与工艺要求,不同测量点位置需满足不同精度要求,需要加入权重。通过权重的调整与优化,实现不同精度工艺要求的最优实现。通过解算进行路径规划与运动控制系统交互,进行柔性自动化对接控制,实现低应力柔性飞机装配。
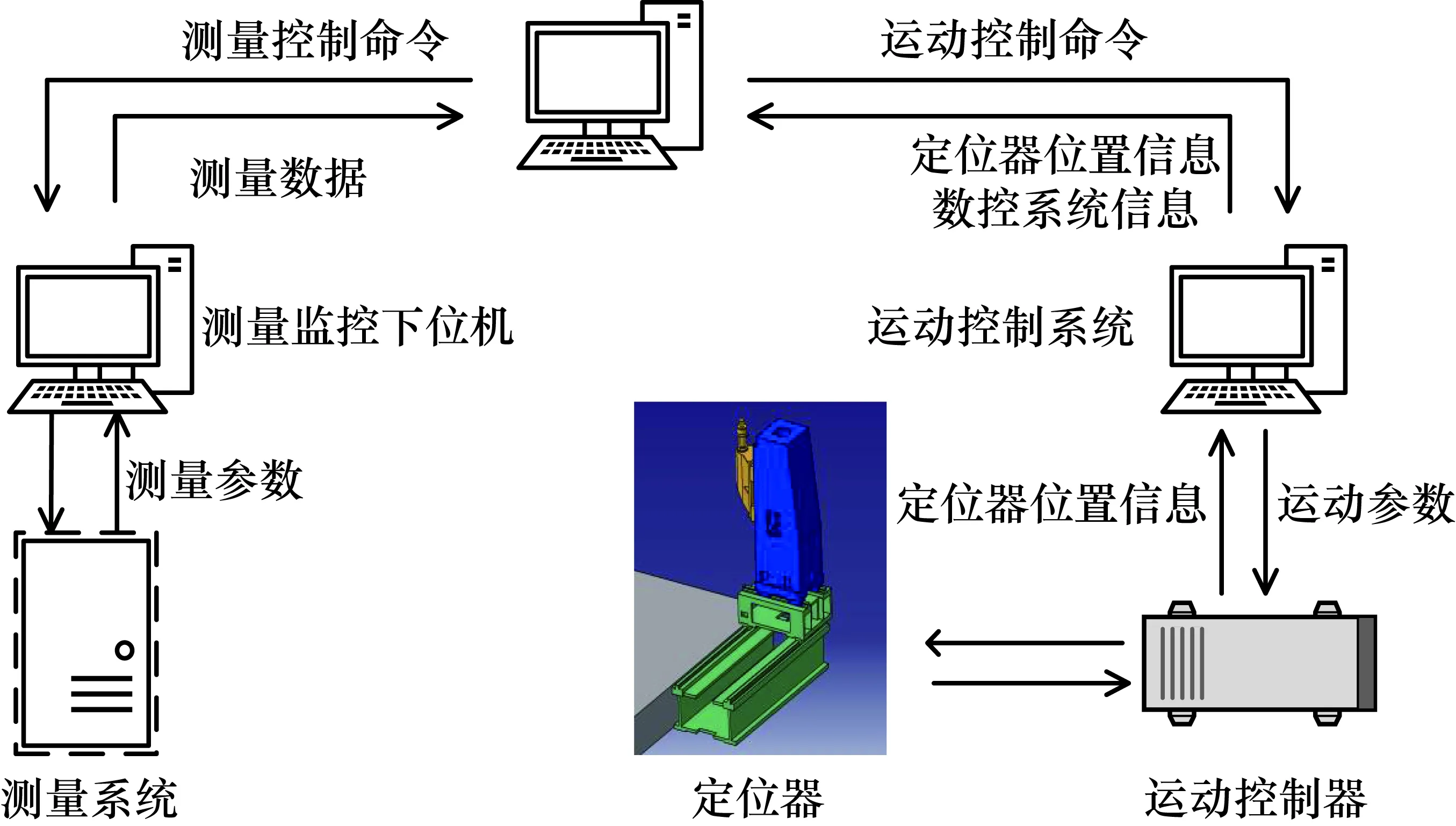
图1 飞机部段自动对接系统架构
SA(Spatial Analyzer)是民机装配中常用的解算工具软件,但作为封装完整的成熟软件,面对的用户是黑箱状态。当根据现场工艺需求修改、微调算法时,无法通过修改软件算法以达到需求。在现场只能根据经验微调各个轴以达到工艺要求,不仅浪费时间成本还需有经验的技术人员在场指导,浪费人力成本。因此,本文基于姿态解算数学理论,完成Python环境下的姿态解算验证,并基于目标函数实现带权重姿态解算、带工程约束或优化的姿态解算。
1 带权重与约束的姿态解算
如图2所示,飞机部段上的测量点提供飞机的当前姿态,通过定位器的三坐标运动控制飞机部段的姿态。部段在调姿装配过程中简化为刚体,理想的刚体运动保证飞机部段运动过程柔顺。因此刚体运动的姿态解算结果为运动参数设置提供了柔性解,从而降低调姿对接过程中应力大小与应力变化速度。
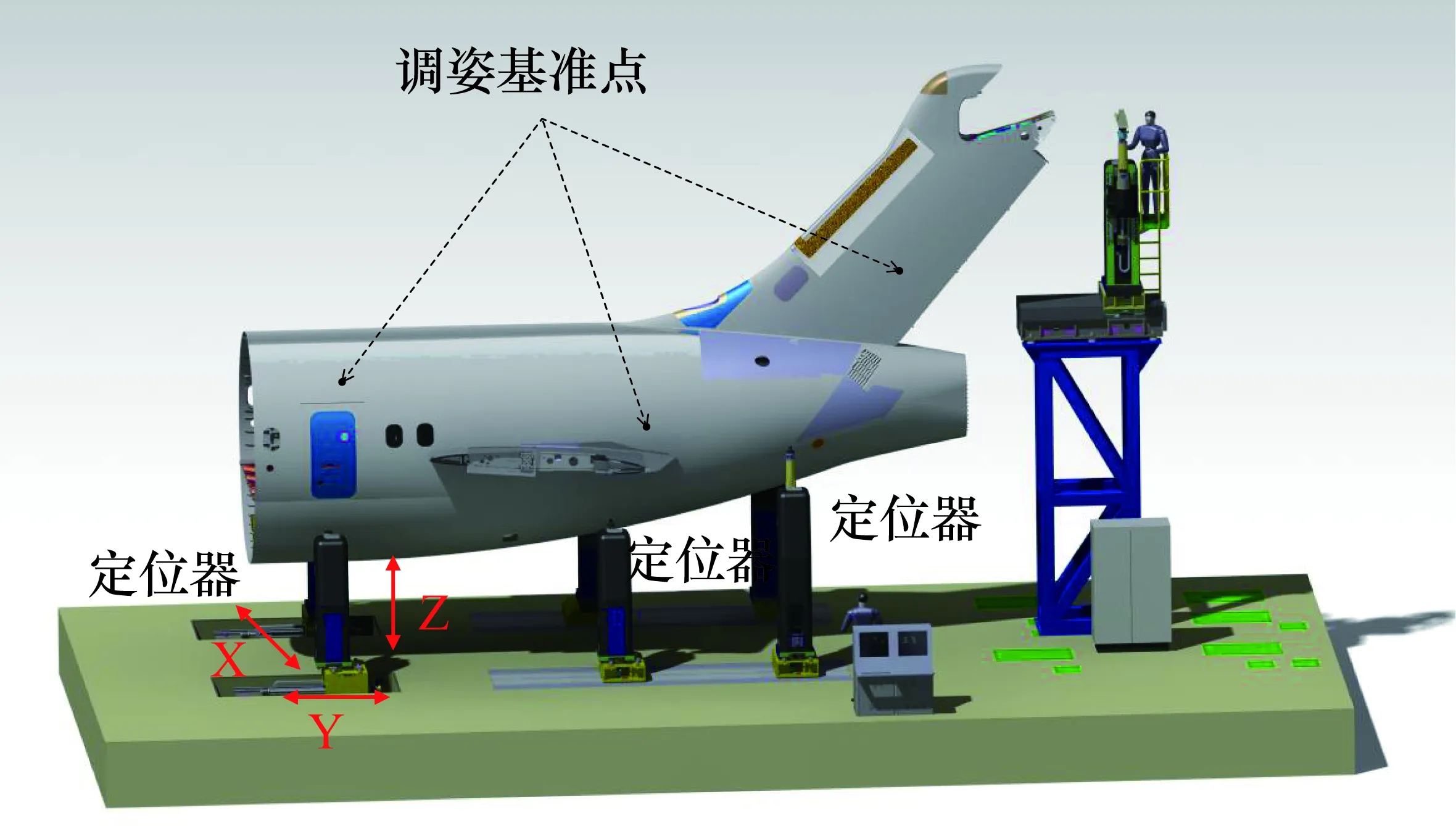
图2 机翼对接示意图
刚性部件上不在同一条直线的3个点可以确定平面与姿态,刚体姿态解算基础为3点定位法:测量刚体上不同线的3个点,并建立一个局部坐标系。这个部件坐标系就可以表达刚体的姿态。当使用这种方法计算姿态时,其误差与坐标系的建立方法相关。当测量点超过3个点时,所有测量点不能同时参与计算。所以,当测量点多于3个点时,需要构建最小二乘目标函数,并对其进行优化与解算。四组元法、奇异值分解法、正交矩阵法、双四组元法、线性子空间法等都是求解点匹配问题的常用算法。Eggert等[6]对前4种算法的精度与稳定性做了比较,表明以上算法都是非迭代的,而且不需要提供附加的初始值。
1.1 SVD分解姿态解算
SVD(Singular Value Decomposition)分解[7-8],即奇异值分解法,是姿态解算的常用方法。在本文的代码实现中运用SVD通过点匹配解算姿态,其解算出的结果为旋转矩阵。该算法的输入是一组飞机部件上确定位置测量点的理论位置Ptheory,即n×3的矩阵,分别对应的是n个测量点的X,Y,Z的全局坐标理论位置。与之对应的,另一组通过测量飞机部件上对应实际的测量点的位置矩阵Pshice。其解算结果为旋转矩阵RSVD和平移向量TSVD。
在获得两组点阵后,根据这组点阵分别求解其位置中心建立局部坐标系。通过计算Ptheory和Pshice给出的坐标系的平均值计算重心μtheory,μshice,从而可以计算出局部坐标系下测量点位置的Qtheory和Qshice。其公式为
Qtheory=Ptheory-μtheory
(1)
Qshice=Pshice-μshice
(2)
Umeyama[8]提出最小二乘法问题通过奇异值分解求解旋转矩阵的问题。其表达式为
[U,S,VT]=SVD(QtheoryQshiceT)
(3)
式中:U与VT分别为行与列的分解矩阵,S为奇异值,并获得旋转矩阵R=UVT。
解算结果中旋转矩阵R的行列式为-1时,会出现结果经过180°的翻转。因此本文的SS判据为

(4)
当旋转矩阵R为非半正定矩阵时,需要对旋转矩阵进行翻转,将其翻转后参与运算(其中diag()为对角矩阵)。
综上,SVD奇异值分解通过飞机测量点实测与理论位置,解算绕局部坐标系的旋转矩阵与平移向量,获取一般点匹配问题算法结果。
1.2 权重的姿态解算
传统的带权重的SVD算法可以将重心位置增设权重与约束[9]等。此类算法附加性好、计算量小,例如将重心位置加上重心权重向量wi:
(5)
本文算法将带权重的最小二乘问题加入SVD中直接进行计算。由于规划问题对初值的敏感度较高,本文将SVD的解算值作为初值,并采用设定目标函数非线性优化的方法考虑权重问题与工程约束。此类算法不仅可以通过将权重加入优化函数考虑各个点不同的权重,还能通过在优化函数中设置约束条件或直接设置边界约束,以达成算法效果。
带权重wi,j的目标函数为
(6)
若将每一点的权重类比成弹簧刚度,目标函数可以被类比成理论刚体位置与经旋转平移后的实际刚体之间的能量。
Kraft[10]提出的序列最小二乘算法(Sequential Least Squares Programming,SLSQP),计算机中提供线性优化的求解算法。通过Python调用该方法可将上述目标函数进行带权重的优化,以计算出目标函数的最优解。该SLSQP梯度方法在近年使用于多领域中,例如飞机机翼设计优化[11]、机器学习预测模型[12]、涡轮机热力学问题[13]中,得到了广泛稳定的应用,具有较高的稳定性与收敛性。
1.3 权重与约束的姿态解算
由于不同的工艺规范、现场经验等在不同的工位和工况下会有不同的约束要求,例如对称性要求、偏差量约束等,SA无法提供对应接口,而本文算法使用非线性优化有两种解决方案:
① 将约束G(x)作为非线性优化的目标函数的一部分,并自定义设置权重值Wconstrain,其表达式为
(7)
②将约束G(x)作为非线性优化的约束项,其公式为
(8)
式中,bi用于设置所需的约束量值。
这两种方案各有特点,第①种将约束项加入目标函数,人为设定乘子,可以自由调节权重来达成不同的定位效果,但不能完全达到强制约束的效果;而第②种方案以牺牲其他优化项以达成强约束效果。
2 算法实现
2.1 权重算法结果与对比
由于SA在现场已成熟应用,其结果具有较高可比性。因此,将本文提出的算法与其进行对比分析,比对输入两种算法(无权重与带权重)的解算结果。
飞机部段水平测量参考点的实测位置、理论位置和权重矩阵需要作为算法输入。将对接过程中一组数据作为输入,对算法进行测试与比对,如表1所示。
通过对比误差矩阵中均方根与每点的直接距离,验证算法的可靠性。结果如表2所示。

表1 输入数据表
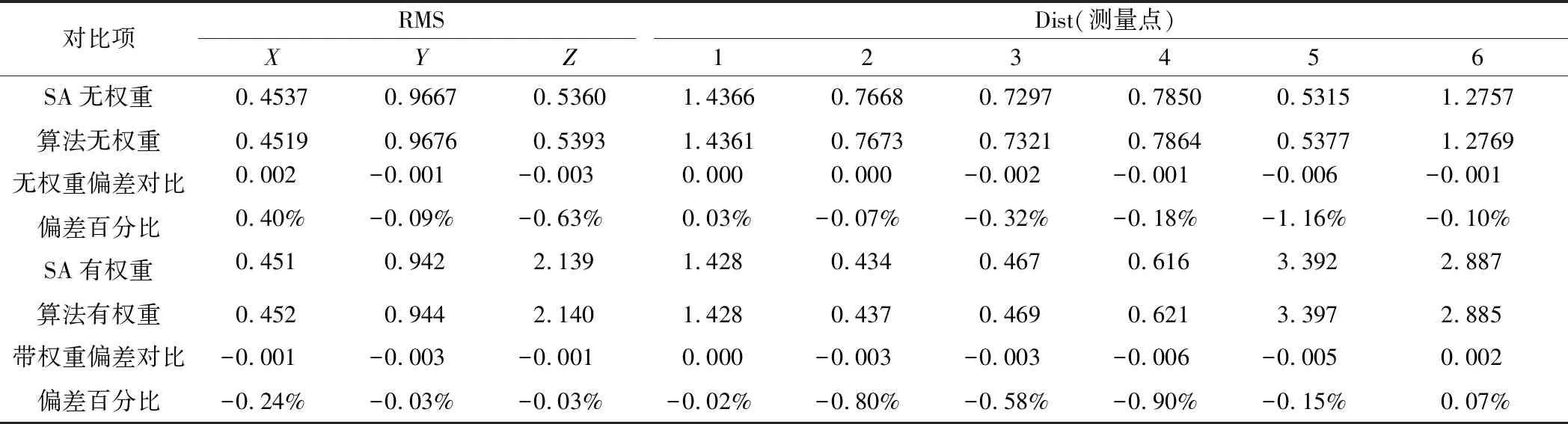
表2 误差结果比对
表2给出无权重与带权重算法误差矩阵的结果,误差矩阵代表实测姿态经过算法解算后与理论位置的差值,其单位为mm。通过对比两种算法的三坐标方向的误差离散程度与每个测量点误差的直线距离,可直观分析两种算法近似度。
对比本文解算结果与SA算法结果,误差绝对值小于0.01 mm,且误差百分比约在2%以内,误差的量纲远低于公差。
2.2 约束算法实现
针对不同工位不同产品对象,制定基于工程约束、工艺要求和质量要求的姿态评价边界,诸如对称性要求等。位置精度与公差约束随着不同工位要求不同,姿态评价的边界也不同,因此装配现场对不同的约束有定制化需求。
对于此类约束,本文在1.3节提出两种算法方案。以假设某型飞机机翼的3、4号测量点在X方向的对称性需不超过0.1 mm为例,对算法进行测试比对,设置约束函数G(x)为误差矩阵中X3点与X4点的差值。
表3中阴影部分为约束对象。对比无约束情况下的解算结果,优化算法与约束条件算法都对约束结果产生影响。
图3为不同约束算法的结果。第1种优化算法中约束权重较小时,优化效果较弱,但整体误差改变较小;权重增大优化效果增强,但测量点其他方向的位置误差增大。第2种约束边界算法,约束项小于设定值(0.5 mm),而对比表3,其他测量点的位置误差大幅增大,此方法在约束边界过高或矛盾时将出现其他点的误差过大或丢失物理意义等情况。

表3 约束算法比较 单位:mm

图3 目标约束项比对
3 结束语
民机部段的调姿对接过程中,姿态的控制影响飞机的装配质量。数控定位器的运动控制需要通过姿态解算获取,本文提出新的姿态解算方法为飞机姿态控制提供算法支持。通过SVD计算无权重姿态解算的初值,并通过权重与约束加入优化算法,实现基于工程约束与权重优化的民机部段柔性调姿算法。并通过对比分析算法实现结果,验证算法的可靠性。
权重的使用已逐渐扩展到飞机装配过程中,而现阶段自动对接系统虽已广泛应用于民机部段的装配过程中,但对于不同软件与系统之间的交互接口仍需进行二次开发。调姿对接算法软件通过提供控制系统欧拉角的解算结果,即X、Y、Z、A、B、C三坐标平移旋转量,通过外部数据处理将电机运动量输入执行系统。在本文中可直接进行数据处理,设置对应接口,为上位系统提供便捷调用功能。可通过算法中使用的过程数据完成路径规划,建立与底层运动控制器的交互,实现柔性自动化对接装配。
猜你喜欢
心理学报(2022年5期)2022-05-16
当代陕西(2020年17期)2020-10-28
人大建设(2018年5期)2018-08-16
证券市场红周刊(2018年3期)2018-05-14
小学阅读指南·低年级版(2017年1期)2017-03-13
诗选刊(2015年4期)2015-10-26
人生十六七(2015年6期)2015-02-28
电影新作(2014年5期)2014-02-27
计算机辅助工程(2012年5期)2012-11-21
阅读(中年级)(2009年11期)2009-04-14