
分数阶微积分在滑模控制中的应用研究*
2022-02-28 13:55鲁文儒缪仲翠姜子运徐文波
传感器与微系统 2022年2期
张 鑫, 鲁文儒, 缪仲翠, 姜子运, 徐文波
(1.兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070;2.甘肃省人工智能与图形图像处理工程研究中心,甘肃 兰州 730070)
0 引 言
滑模控制的特点是在其设计过程中不需要系统提供十分精确的动力学模型,只需要利用轨迹的跟踪误差或者位置控制误差合理设计滑模面即可,并拥有响应快、鲁棒性好等特点,这种方法在此类非线性、不确定性的系统中应用十分广泛[1~4]。滑模控制的设计主要包括滑模面和趋近律的设计,其中趋近律的设计问题一直备受关注。
趋近运动作为滑模运动中的一大重要组成部分,其过程是指系统由任意的初始位置向切换面趋近,最终得以到达切换面的一种运动形式。能够合理选用趋近律,可以加快趋近的速度、减少系统抖振。在传统的滑模控制理论当中,十分常用的趋近律主要是等速趋近律、指数趋近律等[5]。
不同于整数阶微积分理论,分数阶微积分的阶次是能够任意选取的,从而大大提升了控制系统设计过程中的灵活度[6]。近年来,许多学者将分数阶微积分与滑模控制相结合,形成分数阶滑模控制[7]。 其中,文献[8]以一类不确定性系统为研究对象,提出了一种基于分数阶微积分理论的滑模控制方法,并在磁轴承系统和陀螺仪系统上进行了验证。文献[9]以永磁同步电机为研究对象,提出一种参数自整定的分数阶滑模控制方法。文献[10]以永磁同步电机为研究对象,针对其位置控制,提出一种分数阶滑模控制器。文献[11]将分数阶滑模控制策略应用于一种挠性航天器上,以此实现对航天器姿态跟踪问题的解决,并取得了较好的效果。文献[12]则在直流调速系统中使用一种改进型的分数阶滑模控制方法,以此实现对直流调速系统动态性能的改善,达到减小抖振的效果。但是以上文献均没有从数学角度来充分证明分数阶微积分与滑模控制相结合后的趋近问题以及滑模控制所存在的抖振现象。
本文利用分数阶微积分与滑模控制提出分数阶滑模趋近律,重点从数学角度分析了分数阶趋近律的趋近速度问题以及滑模控制所存在的抖振现象,并且通过仿真实验证明的所提出分数阶趋近律的有效性和稳定性。
1 分数阶趋近律设计
目前,在控制领域中应用较多的分数阶微积分定义有三种,分别为:Grunwald-Liouvile(GL)定义、Riemann-Liouvile(RL)定义以及Caputo定义[13]。Caputo型分数阶微积分初始条件的定义与整数阶微积分的相一致,近年来在工程应用中得到了广泛的研究。

m-1<α≤m
(1)

引理1[8]:已知如下系统
Dαx(t)=f(x,t)
(2)
如果x=0是该非自治分数阶系统的平衡点,且f(x,t)满足Lipschitz条件。假设存在一个Lyapunov函数V(t,x(t))满足下列条件
α1‖x‖≤V(t,x)≤α2‖x‖,
V(t,x)≤-α3‖x‖
(3)
式中α1,α2和α3均为正常数,β∈(0,1)。则式(2)是渐近稳定的。
本文设计的分数阶趋近律为
Dαs=-ksign(s)
(4)
其中,0<α<1。控制系统状态到达滑模面速度通过改变阶次α和系数k改变。
2 分数阶趋近律性能分析
2.1 稳定性分析
证明:采用Lyapunov函数
(5)
根据Caputo分数阶微积分定义形式(1)
(6)
对式(5)两端进行求导,结合所选取分数阶趋近律和式(6),得
(7)
利用sign(D1-α(-ksign(s)))=-ksign(s)[14],得
=-ksign(sT)sign(s)=-k
(8)
2.2 趋近律稳态抖振分析
以传统指数趋近律为例

(9)
当S趋近于0时,在滑模面上的极限为
(10)

2.3 趋近速率分析
趋近速率分析:

1)指数趋近律趋近时间
由式(9)可得
(11)
当滑模面s>0时
(12)
当滑模面s<0时
(13)
(14)
2)分数阶趋近律趋近时间
为解决此问题,使用∂阶Riemnnan-Liouvile分数积分,然后使用标准导数。

(15)
Gamma函数定义为
(16)
由文献[15,16]得
(17)
利用s(t)-s(0)=J∂(-ksign(s))简化上式为
(18)
由式(18)得
(19)
所以分数阶趋近律趋近时间为
(20)
由式(14)、式(20)可得
(21)
从上面的推导可以得出结论:分数阶趋近律的趋近速度要比指数趋近律的趋近速度快。
3 仿真实验
n关节机械臂动力学模型如下[17]

(22)

将本文所提出来的分数阶趋近律与传统指数趋近律进行对比分析,选择滑模面为

(23)
策略1指数趋近律控制律[18]
策略2分数阶滑模控制律
根据机械臂动力学模型,qd(t)为关节期望位置,q(t)为关节实际位置,定义关节位置跟踪误差为
e(t)=qd(t)-q(t)
(24)
对式(24)求二次导为
(25)
对式(23)求一次导为

(26)
将式(22)和式(24)代入式(26)得
(27)
对式(4)求一次导为
(28)
由式(27)和式(28)得到控制律为
(29)
以两关节机械臂为例,通过FOMCON[19]工具箱进行仿真分析。
当给定期望轨迹为单位阶跃响应时,得到如下结果。图1为三种方法下的单位阶跃响应曲线,表1为三种方法下的单位阶跃响应性能指标,由图1和表1可知,本文所提方法可以较好地满足单位阶跃响应中动态性能指标与稳态性能指标的要求(当以正弦为输入信号时)。
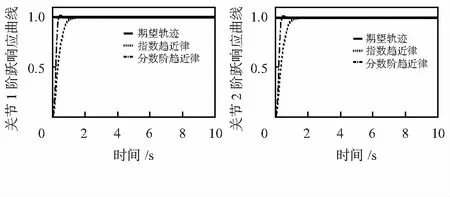
图1 阶跃响应曲线
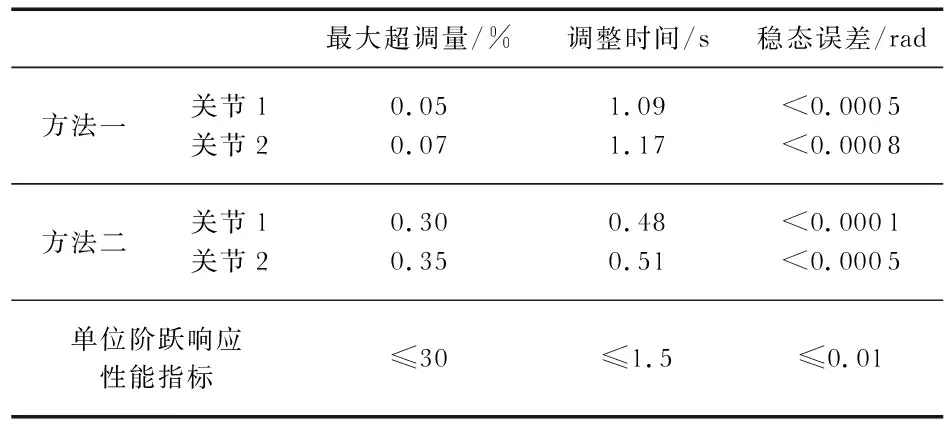
表1 单位阶跃响应性能指标
图2为机械臂两个关节的控制输入曲线。由图2可得,在指数趋近律下系统抖振明显,即本文所提出的分数阶趋近律可以使机械臂运行更加平滑稳定,很大程度上削弱了抖振。
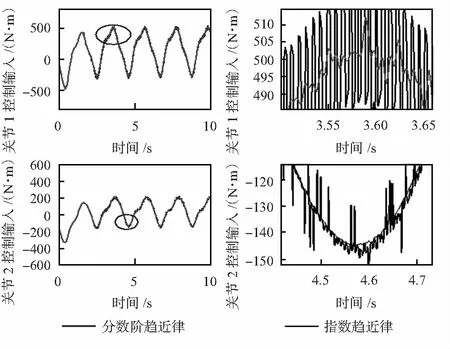
图2 控制输入曲线
图3为在两种趋近律下两个关节的位置跟踪曲线。由图3可知,在分数阶趋近律下两个关节的位置跟踪效果更好,跟踪速率更快,控制精度更高。

图3 位置跟踪曲线
图4为位置跟踪误差曲线,选取角位移调整时间与位置误差的均方根误差作为判断参考值,所得数据比较结果如表2所示。
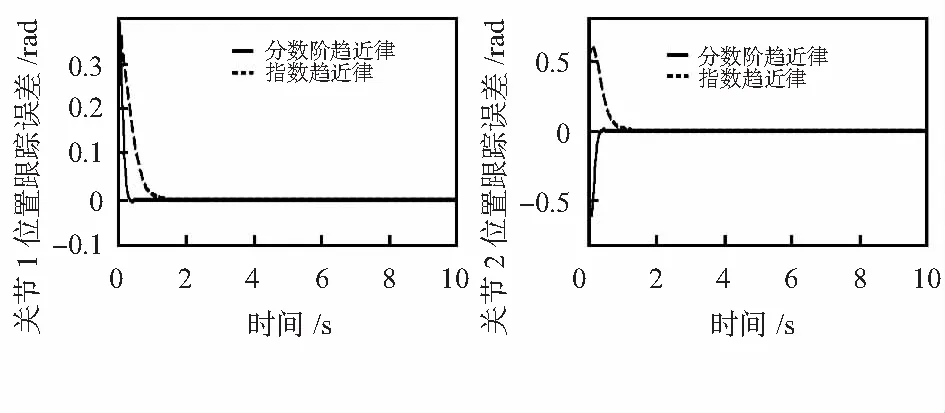
图4 位置跟踪误差曲线
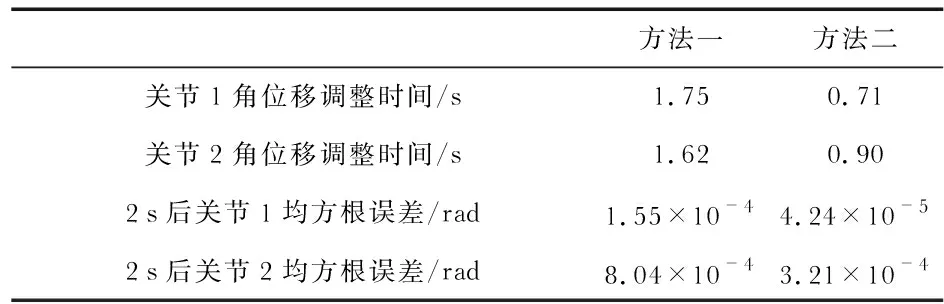
表2 控制方法数据比较
为了进一步验证在分数阶趋近律下系统的抗干扰能力,引入干扰
f(t)=200×exp(-(t-3)2/(2×0.12))
(30)
式中 200为干扰峰值,3为干扰中心位置,0.1为干扰时间宽度。仿真得到如图5的位置跟踪误差曲线。由图5可得,分数阶微积分的引入可以增强系统的鲁棒性。

图5 干扰下的位置跟踪误差曲线
4 结 论
本文首先介绍了分数阶微积分的相关定义,然后以机械臂为研究对象,把分数阶微积分与滑模控制相结合,提出一种分数阶趋近律,并利用仿真实验与指数趋近律进行了对比分析,得到如下结论:
1)分数阶趋近律的引入主要表现在能够柔化运动轨迹,具有更优良的平滑特性,同时在很大程度上实现了对抖振的削弱。此外,分别在分数阶趋近律以及传统指数趋近律下关节1的角位移调整时间分别为1.75,0.71 s,关节2的角位移调整时间分别为1.62,0.90 s,同时各关节的均方根误差也大大减小。
2)在引入干扰后在分数阶趋近律下的控制器具有更好的鲁棒性,系统的抗干扰能力更强。
因此,与传统指数趋近律相比,分数阶趋近律,在很大程度上使各关节的跟随速度与跟随效果得到增强,系统抖振明显减小。
猜你喜欢
内蒙古电力技术(2022年1期)2022-03-18
化工自动化及仪表(2021年6期)2021-11-26
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28
电子技术与软件工程(2020年17期)2020-02-02
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
