C-V2X PC5接口通信关键技术及性能评估
2022-03-02 10:05申亚飞钱肇钧冯晓枫
汽车与新动力 2022年1期
申亚飞 钱肇钧 冯晓枫
(1.上海机动车检测认证技术研究中心有限公司,上海 201805;2. 国家无线电监测中心,北京 100037)
0 前言
车联网借助新一代信息通信技术,提升了车辆智能化水平和自动驾驶能力,提高了交通效率,改善了驾驶员的驾驶体验,为用户提供了智能、安全、舒适及高效的驾驶服务。车联网技术在降低交通事故发生率、提高交通效率、缓解交通拥挤、降低能耗及减少环境污染方面具有重要意义。通信技术作为车联网中重要的技术,是实现信息交互的载体,可为车联网提供全方位高效网络连接[1]。
目前,基于长期演进网络(R14版本)的车联网(LTE-V2X)的蜂窝车联网(C-V2X)通信技术已接近商业化阶段。该技术可实现交通工具与其他车辆,以及其他使用短距离通信或蜂巢式网路的道路使用者的有效沟通。未来,随着第五代移动通信(5G)技术的强化,C-V2X通信技术将大幅提升交通效率和道路安全。
C-V2X通信技术是智能交通运输系统(ITS)的重要组成部分。由于涉及到车辆与人员的安全,C-V2X通信终端产品在实际投入使用前必须对其进行严格的测试。鉴于现场测试的效率较低,成本较高,故使用建模仿真测试方法是车联网行业内公认的最重要、最有效的方式之一。
1 C-V2X概述
车联网通信支持车辆与任何事物(V2X)之间的信息交互。V2X通信模式包括:车与车(V2V)、车与人(V2P)、车与基础设施(V2I)、车与网络(V2N)的通信交互。
C-V2X是基于第三代移动通信(3G)/第四代移动通信(4G)/5G蜂窝网络通信技术演化而成的蜂窝车联网通信技术。C-V2X技术主要采用2种通信模式,分别定义为模式3和模式4。2种模式分别对应不同的通信接口[2]。图1示出了C-V2X模式3通信技术示意图。该模式由基站集中控制管理无线资源分配相关工作,车辆仅在基站覆盖范围内才能进行通信,其对应于终端和基站之间的通信接口(Uu)。在C-V2X模式4中,车辆可自主选择无线资源进行V2X业务传输,不需要借助基站等网络基础设施。该模式采用C-V2X的底层直连蜂窝通信协议(PC5)接口进行通信,利用侧链(SL)发送V2X消息,从而实现车辆间的低时延、高可靠及高容量通信(图2)。

图1 C-V2X模式3 Uu接口通信示意图

图2 C-V2X模式4 PC5接口直通方式示意图
C-V2X通信技术作为面向车辆、行人、道路基础设施、云平台的通信综合解决方案,具备在高速移动环境中低时延、高可靠、高速率、安全的通信能力,能实现更加全方位的连接和更高效的信息交互,以满足车联网通信的多种应用需求。C-V2X典型的应用场景包括信息服务、交通安全、交通效率提升,以及自动驾驶等[3]。
2 C-V2X PC5接口的关建技术
C-V2X模式4支持车辆之间的直接通信,允许车辆以分布式调度方式自主选择无线通信资源,而不需要通过基站进行资源集中调度。本文主要对C-V2X模式4的通信方式进行分析和研讨。针对车联网应用场景中车辆高速移动的特性,以及数据传输要求低时延、高可靠等需求,C-V2X标准对子帧结构、同步机制及资源池配置进行了增强[4-8]。
2.1 子帧结构
在C-V2X应用场景中,车辆运动速度较快,且车辆可能在高频段工作,这会导致多普勒频率发生偏移,对信道产生严重影响。因此,需要在C-V2X PC5接口通信中优化设计解调参考信号(DMRS)结构。C-V2X通信技术借鉴了基于长期演进(LTE)网络终端直通技术的DMRS列结构,将1个子帧中的2列DMRS增加到4列DMRS。图3示出了C-V2X PC5接口通信的子帧结构。该结构可使邻近的DMRS间隔从先前的0.50 ms缩减为0.25 ms,导频密度在时域上有所增加,有效解决了典型高速场景时高频段的信道检测、估计及补偿等问题。除DMRS结构外,增强后的C-V2X PC5接口通信的子帧结构还包括上下行保护时间(GP)及自动增益控制(AGC)。

图3 C-V2X PC5接口通信的子帧结构
2.2 同步机制
在C-V2X系统中,C-V2X通信节点可配置全球卫星导航系统(GNSS)模块,并可直接作为同步源向周围节点提供同步信息。同时,基站也可作为同步源之一,通过广播方式将基站与GNSS之间的时间偏差通知用户,进行时间补偿。由于在基站覆盖范围下的节点与基站同步,故基站覆盖范围下的用户也可作为同步源,将基站同步信号发送到基站覆盖范围外的节点。因此,C-V2X通信技术支持GNSS、节点自同步及基站等3种同步源。
2.3 资源池配置
C-V2X利用单载波频分多址(SC-FDMA)支持多用户接入网络。同时,C-V2X支持10 MHz及20 MHz信道带宽用于传输V2X业务,每个信道在时域上被划分为子帧,在频域上被划分为子信道。每个子信道由多个资源块(RB)组成。资源块是分配给用户的最小时频资源单位,1个资源块在时域上占1 ms,在频域上占180 KHz。每个子信道上的资源块数目是可以变化的。
数据和侧链控制信息(SCI)占用子信道进行传输。具体而言,就是数据在传输块(TB)上的物理侧链共享信道(PSSCH)进行传输,每个传输块包含了所有要传输的数据包,传输块的大小取决于数据包大小。传输块必须与其关联的SCI在同一个子帧内进行传输,该SCI在物理侧链控制信道(PSCCH)上占用2个资源块,SCI包含了用于传输块的调制和编码方案等控制信息。
PSCCH与PSSCH可采用2种资源配置方式,即邻带资源配置方式和非邻带资源配置方式。在邻带资源配置方式中,SCI和数据在同一子帧的相邻资源块上进行传输,占用1个或多个子信道;在非邻带资源配置方式中,SCI和数据在同一子帧的非相邻资源块上进行传输。图4示出了2种资源池的配置方式。
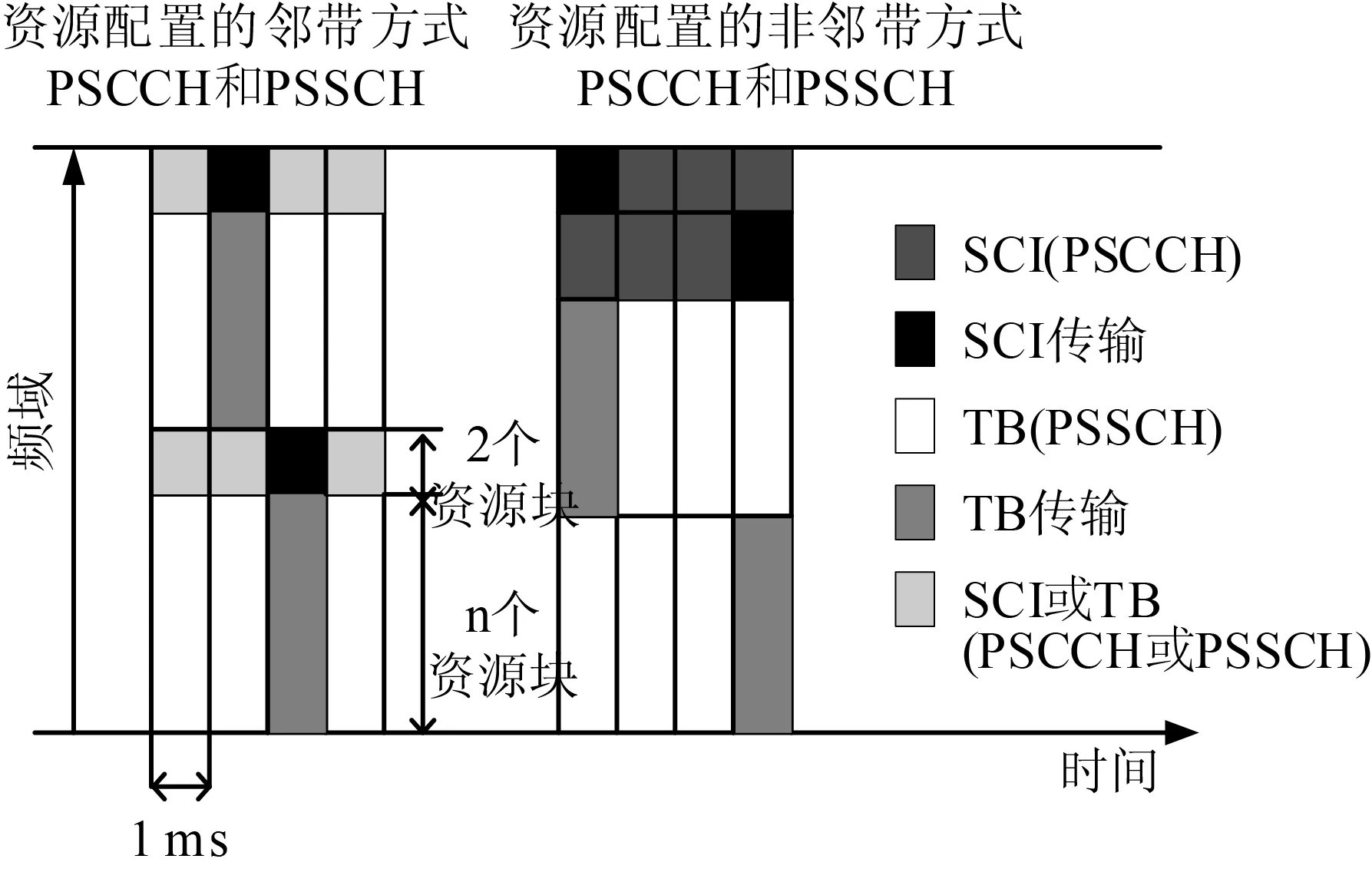
图4 资源池的配置方式
3 基于感知的半持续调度(S-SPS)资源分配机制
3.1 S-SPS资源分配机制概述
C-V2X PC5接口通信技术采用了一种全新的分布式资源分配方案,即S-SPS资源分配机制,该机制可以在不借助蜂窝基站的情况下自主选择资源进行周期性消息的传输。
S-SPS资源分配算法利用V2X业务的周期性特点,通过感知预约周期性的资源传输V2X业务,可避免冲突,提高资源利用率,提升传输可靠性。假设N为资源选择或重选时刻,车辆在选择传输资源后相隔时间长度后传输V2X业务,并假设半持续周期时间长度,则资源选择窗口的2个时间间隔t的计算公式如下:
t=N+t1
(1)
t=N+t2
(2)
式(1)中:t1通常取值为4 ms;式(2)中:t2通常取值为100 ms。
图5示出了C-V2X PC5接口的S-SPS机制时序。候选资源(CSR)是指资源选择窗口内的系统资源,N-1 000到N-1之间的时间间隔称为感知窗口。车辆在进行资源选择或重选时,会根据过去1 000 ms的感知窗口来判断选择窗口内的CSR是否空闲。若CSR空闲,则资源为可用资源,车辆可选择该CSR作为传输资源。当车辆从可用资源中选定传输资源后,可在式(3)所示的时刻内占用该传输资源传输V2X业务,也可以在式(4)所示的时刻内对传输资源的使用进行预约。相关计算公式如下:

图5 C-V2X PC5接口S-SPS机制时序
t=N+M
(3)
t=N+M+l
(4)
式(3)中:N为资源选择或重选时刻;M为车辆在选择传输资源后相隔时间长度。式(4)中:l为半持续周期时间长度。
3.2 S-SPS资源分配过程
C-V2X模式4通信介质访问控制层(MAC)的资源分配机制主要采用S-SPS资源分配算法。S-SPS资源分配算法主要分为3个过程:资源感知过程、资源选择过程、资源重选过程[9]。基于S-SPS资源分配机制,车辆可以根据信道感知结果选择可用的传输资源,并保留此资源便于下一次传输。
3.2.1 资源感知过程
资源感知是执行S-SPS资源分配算法的先导过程。感知的本质就是在感知窗口内检测其他车辆使用资源块的情况,从而在资源选择窗口中确定可用资源。在资源选择窗口中,车辆会检测最近1 000 ms时域子帧内资源块的使用情况,并根据不断接收的直通链路接收信号强度指示(RSSI)阈值来判断给定的资源块是否空闲。在第3代合作伙伴计划(3GPP)中,每个资源块RSSI阈值通常设为107 dBm。若S-RSSI值大于该阈值,则被认为资源块忙碌,反之,资源块为空闲。根据感知结果,车辆可将S-RSSI在阈值之下的资源块作为可用资源。若可用资源小于20%,则该车辆需要增加3 dB的参考信号接收功率(RSRP)阈值,直到建立大于20%的可用资源,否则,车辆将继续执行上述循环步骤。
3.2.2 资源选择过程
在资源感知过程中,当确定了大于20%的可用资源后,需要从中选出最好的20%的可用资源作为传输资源,即具有最低平均S-RSSI值的20%的可用资源。假设QRSSI为平均S-RSSI值,并将其定义为10个子帧的S-RSSI的平均值,计算公式如下:
(5)
式中:QRSSI为S-RSSI值;j为选择窗口;t为时间间隔。
QRSSI值越小,说明该资源被其他车辆占用的可能性越小,因而选择该资源可以减少资源冲突。图6为平均S-RSSI的计算示意图。

图6 平均S-RSSI值的计算
3.2.3 资源重选过程
当车辆随机在最好的20%可用资源中选择传输资源时,系统会相应地产生1个资源计数器,该计数器的取值范围为5~10。车辆每传输1次V2X业务,资源计数器的值相应地减1。当资源计数器的值为零时,车辆会以一定概率重新选择新的传输资源。
3.3 S-SPS算法具体实现步骤
图7示出了C-V2X中S-SPS算法的具体步骤[10]。S-SPS算法程序的实现步骤如下:①设置资源选择窗口,把资源选择窗口内的所有资源设为候选资源。②车辆连续监测子帧,并记录解码的SCI和SL接收信号强度指示测量值,根据感知窗口确定可用资源。③设置信号功率阈值ThreshRsrp。④设置资源分配参数,初始化集合CSRA、CSRB。其中,CSRA为资源选择窗口内的所有候选资源,CSRB为空集。⑤在集合CSRA中,排除RSRP阈值大于信号功率阈值的候选资源。⑥确定大于20%的可用资源。若不满足该条件,则将RSRP阈值增加3 dB,直至满足大于20%的可用资源。⑦在CSRA集合中选择最好的20%可用资源。其选择准则为具有最低平均S-RSSI值的20%可用资源,并放入集合CSRB中。⑧从CSRB中随机选择资源进行V2X业务传输。

图7 C-V2X S-SPS算法具体实现步骤
4 仿真分析
采用网络仿真器NS3对C-V2X的S-SPS算法性能进行仿真分析,并评估了资源重选概率、资源预留间隔、信道带宽对数据包接收率(PRR)的影响。PRR是指在基线距离范围内所有车辆成功接收的数据包数目与所传输的所有数据包数目的比值。表1示出了仿真分析的参数。
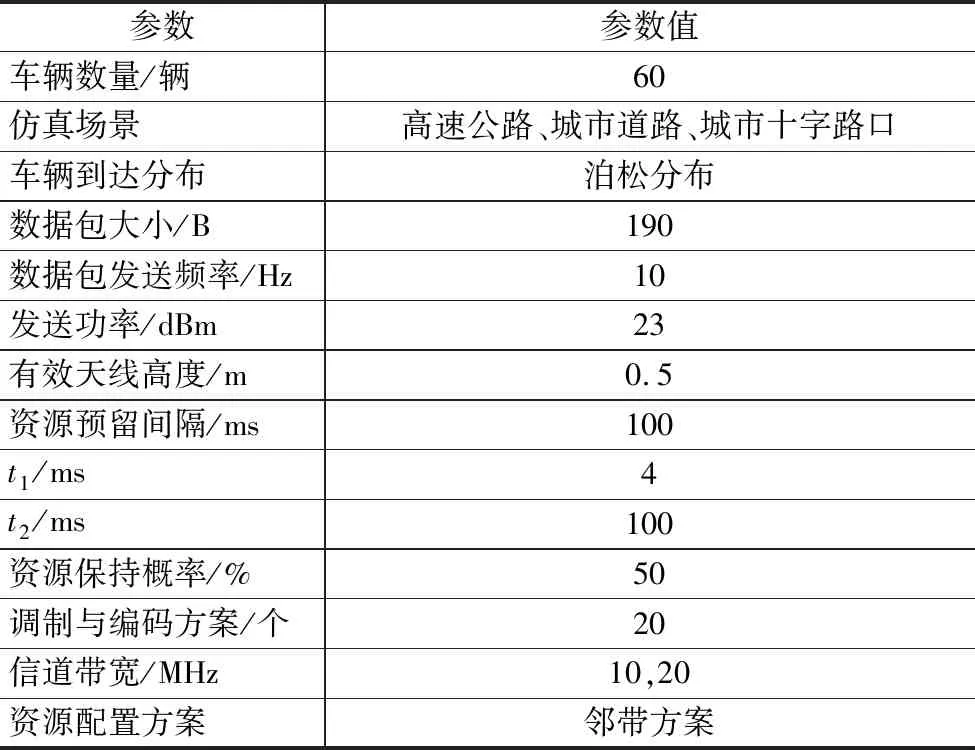
表1 C-V2X的S-SPS算法仿真参数
图8示出了城市道路场景中,当信道带宽为10 MHz时,不同资源重选概率下PRR的变化情况。从图中可以看出,随着仿真时间的增加,各条曲线趋于平稳。当资源重选概率过高时,S-SPS性能欠佳,其原因是资源重选概率越高,资源可用性变化将加剧,从而导致通信可靠性较低,PRR值下降。

图8 不同资源重选概率下PRR的变化情况
图9示出了城市道路场景中,当信道带宽为10 MHz时,不同资源预留间隔下PRR的变化情况。随着资源预留间隔的增加,PRR值有所提升。这是因为资源预留间隔增加,车辆在给定时间内可使用的资源数量减少,因此,多个车辆选择同一资源的概率降低,从而资源冲突减少,PRR有所提升。
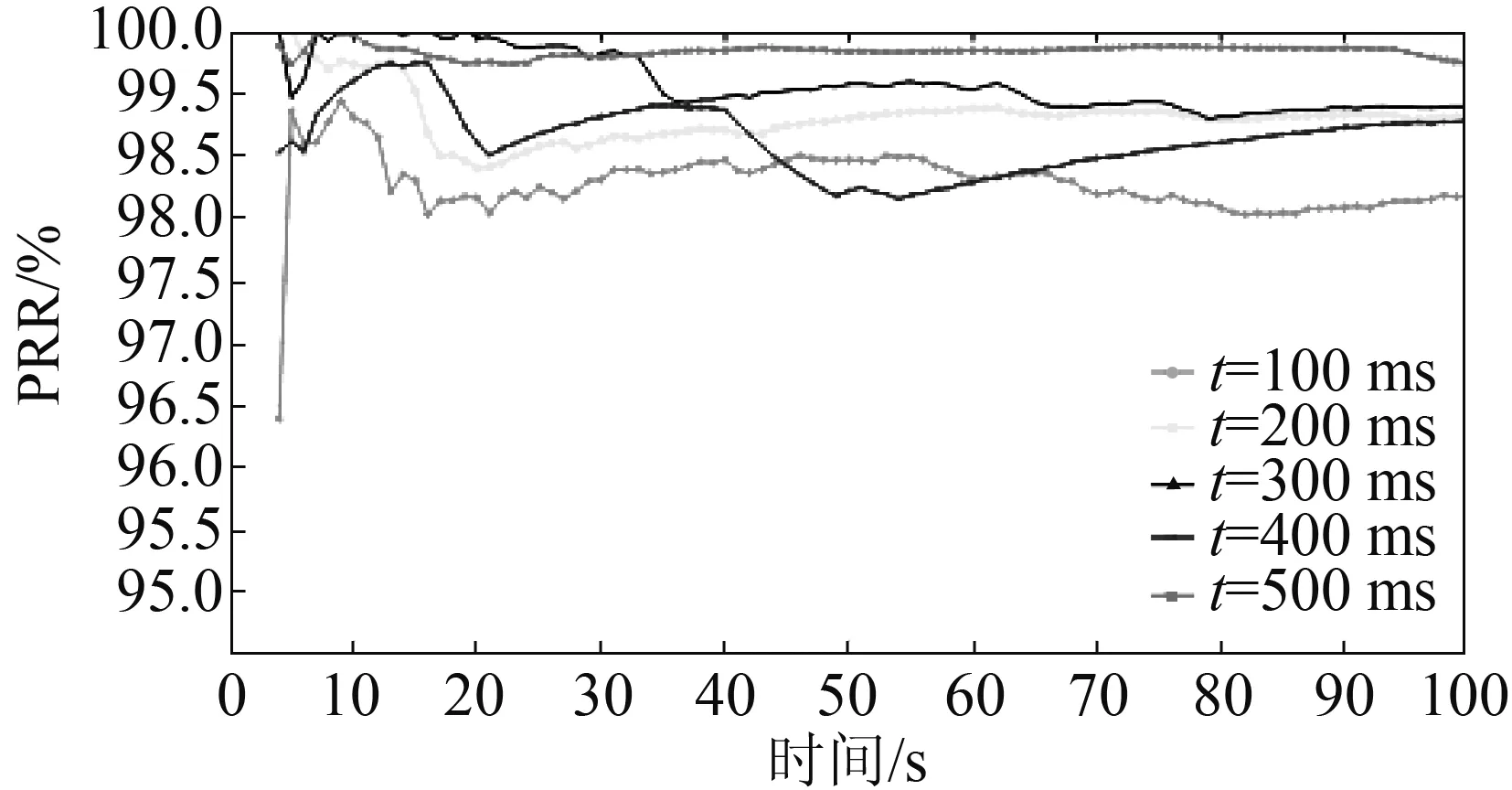
图9 不同资源预留间隔下PRR的变化情况
图10示出了不同场景下不同信道带宽对PRR值影响的评估情况。针对3种不同仿真场景,20 MHz信道带宽的性能优于10 MHz信道带宽的性能。这是因为信道带宽越大,可供车辆选择的资源越多,多个车辆选择相同资源的概率将降低,发生碰撞的机率就越小。因此,成功接收数据包的数量增加,PRR增加。同时,在高速公路场景下的PRR性能略优于城市道路场景,其原因是相比于城区道路场景,高速公路场景下的信道模型只包含视距传输,无线网络信道质量较好,因此PRR性能会有所提升。

图10 不同带宽对应的PRR变化情况
5 结语
本文对C-V2X PC5接口通信关键技术进行了概述,并对S-SPS机制进行了性能评估。C-V2X PC5接口通信可以在没有蜂窝基础设施支持的场景中为车辆提供车车间的直接通信,C-V2X PC5接口通信引入S-SPS资源分配方案后,系统允许车辆自主地选择和保留无线资源进行消息的传输。仿真分析结果表明,资源重选概率、资源预留间隔及信道带宽对C-V2X PC5接口通信性能具有一定影响。
随着智能网联汽车产业的迅猛发展,智能驾驶技术已经日臻成熟,但是用于车联网通信的C-V2X的频段尚未正式确定。因此,通过仿真手段开展对C-V2X相关资源的配置和通信质量的测试分析,将有助于为我国C-V2X的频段分配提供技术支撑,为车联网商用部署打下技术基础。
猜你喜欢
杭州电子科技大学学报(自然科学版)(2022年4期)2022-08-23
现代电子技术(2022年11期)2022-06-14
建材发展导向(2021年19期)2021-12-06
现代计算机(2021年10期)2021-05-28
现代计算机(2021年3期)2021-03-24
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
软件导刊(2018年1期)2018-02-01
计算机应用(2016年10期)2017-05-12
科技视界(2016年17期)2016-07-15