基本认知与操作能力对机械臂精细对接任务绩效及人误的影响
2022-03-03 05:51朱淑佩唐伟财王笃明
载人航天 2022年1期
朱淑佩, 唐伟财, 王笃明, 肖 毅*
(1.浙江理工大学, 杭州 310018; 2.中国航天员科研训练中心人因工程重点实验室, 北京 100094)
1 引言
空间站机械臂在空间对接、维修及救援等任务中发挥关键作用,利用机械臂遥操作辅助和代替航天员操作极大程度上保障了航天飞行任务的安全性,提高了在轨任务执行效率。机械臂遥操作包括大范围转移和精细操作2 个操作阶段,航天员在精细操作阶段出现的人误并不少见。 因此,识别机械臂精细对接任务(Manipulator Fine Docking,MFD)中绩效及人误的影响因素,对于提高任务绩效、减少人误等都有重要意义,同时也有助于筛选航天员选拔指标。
国内外已有针对认知能力与机械臂遥操作任务的关系研究。 Brandan 等通过对操作者在空间站遥操作任务绩效及视角转换等能力测试研究中,发现视角转换得分高者在对接任务中明显更快、更准确,碰撞的频率也更少,同时对接失败的主要原因是操作者的距离感知不够准确。 Menchaca-Brandan 等通过模拟空间站对接任务发现各项任务绩效与操作者的心理旋转和空间定向能力有很强的正相关关系。 Eyal等通过对腹腔镜遥操作绩效与志愿者的心理旋转和空间定向能力进行相关性分析,也发现了类似结果。 Dan 等通过模拟机械臂对接瞄准遥操作任务发现心理旋转能力显著影响对接遥操作任务的效率及可靠性。 田雨等开展了认知能力与手控交会对接任务绩效的关联分析,结果显示三维心理旋转、速度知觉、视觉搜索等能力与人控交会对接任务绩效紧密相关。Riley 等指出操作者的注意分配能力越强,操作者在操作过程中更能将注意资源合理分配到各项关键信息中,对任务场景的认知更加完整,操作绩效相对更好。 唐伟财等通过典型遥操作任务分析发现注意持续、空间记忆及工作记忆等能力也与遥操作任务绩效及人误相关,采用提取机械臂遥操作过程中的自发脑电功率谱特征及非线性动力学特征,发现脑力负荷主要来源于空间认知及距离知觉。
在空间遥操作任务中,操作能力直接影响任务能否安全、精准完成。 手柄输入量控制能力、平滑操作能力是NASA 选拔航天员重要的考察项目。 此外,王萌等通过对交会对接任务进行人误行为分析,也发现手动操作能力是造成航天员失误的主要因素。 目前,已有一些针对不同群体和不同任务类型的操作能力测试。 针对空间站遥操作任务的操作特点,中国航天员训练中心开发了一套较为完整且有针对性的操作能力测试平台,用于航天员等操作人员的操作能力评测,包括定向控制、定点控制、速度控制、方向控制、综合控制、手柄操作准确性、手柄操作稳定性、双手协调控制等8 个模块。
综上,基本认知能力及操作能力与空间遥操作任务绩效及人误紧密相关,目前国内尚缺乏较为全面的基本认知能力及操作能力对机械臂精细对接任务绩效及人误的影响研究。 本文基于机械臂精细对接任务,设计开展基本认知能力、操作能力与机械臂精细对接任务绩效及人误关联实验,研究识别机械臂精细对接任务的影响因素,对航天员的选拔训练、在轨认知监测、操作系统优化设计及任务安排等方面有重要意义。
2 方法
已有研究表明,距离知觉、方向知觉、速度知觉、注意分配、持续注意、心理旋转、视角转换、空间记忆、工作记忆、视觉追踪等基本认知能力,以及定向控制、定点控制、速度控制、方向控制、综合控制、手柄操作准确性、手柄操作稳定性、双手协调控制等操作能力与遥操作任务绩效及人误相关,故本文主要研究以上10 项基本认知能力及8 项操作能力对机械臂精细对接任务绩效及人误的影响。
2.1 志愿者
中国航天员科研训练中心20 名志愿者(女7名,男13 名),年龄(26.5±2.44)岁,本科及以上学历,右利手,双眼矫正视力4.8 以上,无色盲,身体健康且无精神病史。 志愿者完成了机械臂模拟操作培训,正式实验前需自主操作训练5 次以上,且最后2 次均能对接成功。
2.2 机械臂精细对接任务平台
机械臂仿真实验平台基于空间站基本构型和布局进行仿真设计,包括3 舱、1 个节点舱、1 个机械臂,设置1 个靶标。 实验任务为控制机械臂对接靶标。 共设置机械臂末端摄像头、舱体摄像头、机械臂关节摄像头、空间站全局仿真界面4 个摄像头场景辅助操作,操作过程中实时显示机械臂各个关节的角度信息。
为确保各初始状态相同难度水平,初始条件设置满足以下要求:机械臂初始状态各关节距限制角度不少于90°,机械臂末端距离目标3 ~4 m以内,姿态偏差90°以内,且末端摄像头的显示界面能清晰地看到目标对接机构。 对接成功条件为各维度位置偏差小于0.01 m,各维度姿态偏差小于1°。
2.3 基本认知能力测试平台
基本认知能力包括距离知觉、方向知觉、速度知觉、注意分配、持续注意、心理旋转、视角转换、空间记忆、工作记忆、视觉追踪等10 项。 采用尺寸图形感知偏差测试距离知觉;采用遮蔽运动范式测试方向知觉;自主开发的视觉双任务注意分配能力测试任务测试注意分配能力;CPT(Continuous Performance Task)范式测试持续注意能力;S-M 测试范式(Shepard 和Metzler,1971)测试心理 旋 转 能 力; PSVV ( the Purdue Spatial Visualizations Test:Visualization of Views)范式测试视角转换能力;分别采用空间3-BACK 和字母2-BACK 范式测试空间记忆和工作记忆;采用多目标视觉追踪实验范式测试视觉追踪。
2.4 操作能力测试平台
采用中国航天员科研训练中心开发的用于测试包括航天员在内的操作员手柄精细操作能力的软件,该软件基于C++程序开发,经检验已证明其各模块具有良好的信效度。 主要包括定向控制、定点控制、速度控制、方向控制、综合控制、手柄操作准确性、手柄操作稳定性、双手协调控制等8 项操作能力测试。
2.5 实验任务
本文考察机械臂精细对接任务,分为相对位姿粗调阶段及最后精细操作阶段。 相对位姿粗调阶段主要调整机械臂相对目标的位置与姿态,使机械臂达到目标附近,且与目标基本对准,即下文的机械臂精细对接任务的前期阶段(末端各维度距离偏差大于0.3 m,或姿态偏差大于3°的阶段);精细操作阶段主要依靠末端摄像头对机械臂进行微调,完成精细对接任务,即下文的机械臂精细对接任务的最后精细对接阶段(末端各维度距离偏差小于0.3 m,且姿态偏差小于3°的阶段)。
实验分为2 个阶段:①通过能力测试平台对志愿者进行基本认知能力测试及操作能力测试;②开展机械臂精细对接任务实验。 对接实验共有6 试次,每试次均不限时间,志愿者自行判断是否达到对接成功条件,并自行结束该试次任务,实验场景如图1 所示。

图1 机械臂精细对接任务实验Fig.1 Experiment of MFD tasks
2.6 研究指标
采集数据包括基本认知能力测试数据、操作能力测试数据、机械臂绩效及人误数据。
1)基本认知能力测试数据。 基本认知能力测试的类型及指标包括距离知觉(知觉偏差)、方向知觉(知觉偏差)、速度知觉(知觉偏差率)、注意分配(Q 值)、持续注意(反应时)、心理旋转(正确率)、视角转换(正确率)、空间记忆(正确率)、工作记忆(正确率)、视觉追踪(正确率)。
2)操作能力测试数据。 基于操作能力测试平台采集包括定向控制、定点控制、速度控制、方向控制、综合控制、手柄操作准确性、手柄操作稳定性、双手协调控制8 项操作能力数据。
3)机械臂绩效及人误数据。 针对航天员在轨进行机械臂作业,本文根据NASA 通用机器人训练技能评估标准及国内空间站机械臂遥操作任务指标研究,结合精细操作任务特性采集了11 项指标,如表1 所示。
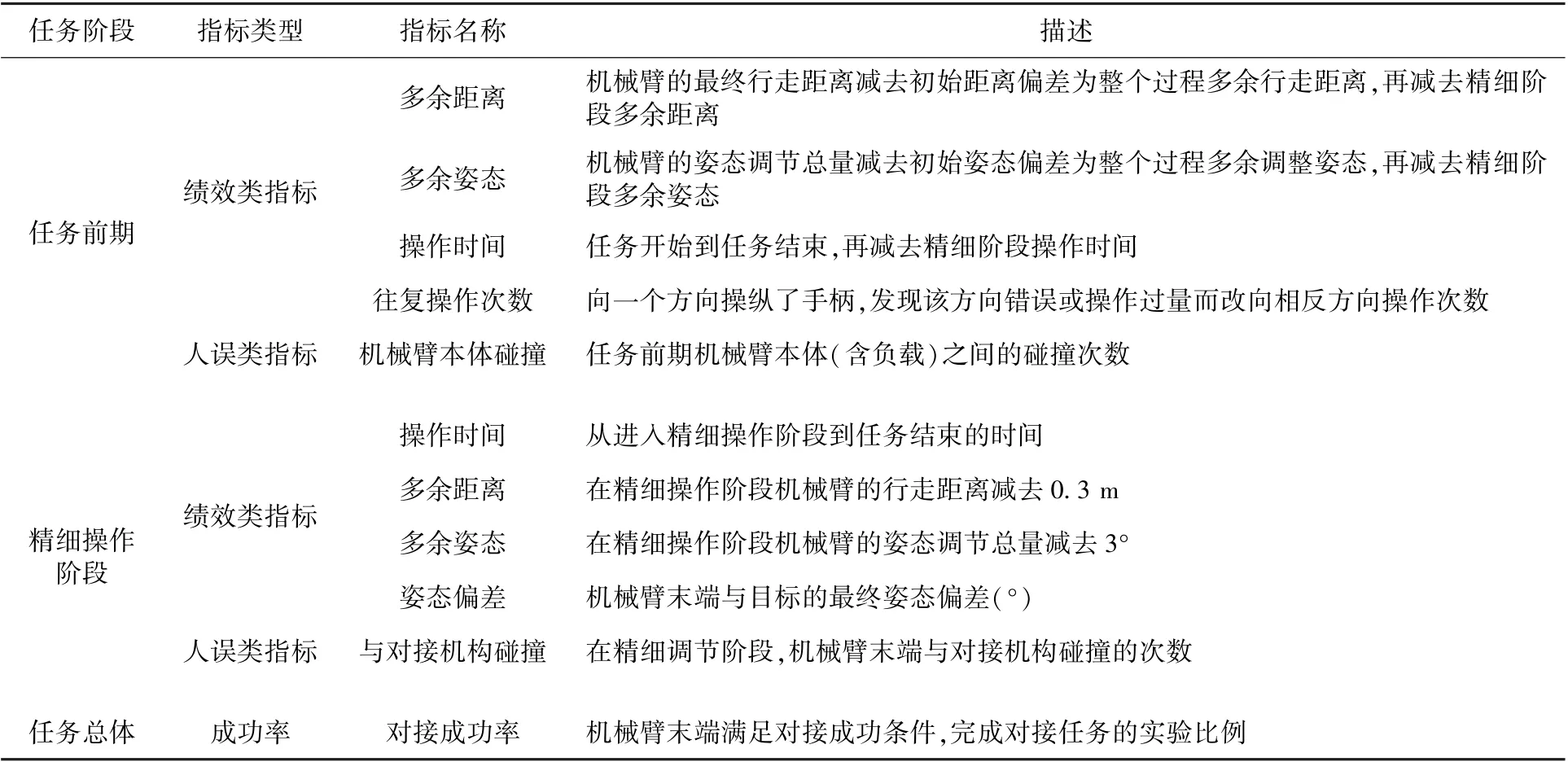
表1 机械臂绩效及人误指标Table 1 Performance and human error indicators of MFD tasks
2.7 统计分析
采用SPSS 22.0 软件对数据进行Pearson 线性相关分析,研究各项基本认知能力及操作能力与机械臂操作绩效及人误指标之间的相关性。 分别分析志愿者10 项基本认知能力与机械臂任务绩效及人误指标的相关性,以及8 项操作能力与机械臂任务绩效及人误指标的相关性,最后分阶段和指标类型梳理出与机械臂精细对接任务绩效及人误显著相关的基本认知能力与操作能力。<0.05 认为差异具有统计学意义。
3 结果
3.1 基本认知能力
基本认知能力与机械臂精细对接任务绩效及人误相关分析结果如表2 所示。 从表2 可知:械臂精细对接任务前期阶段的操作与方向知觉显著相关,主要反映在机械臂本体碰撞次数与手柄往复操作指标上。 精细对接阶段的操作主要与距离知觉、方向知觉、速度知觉、注意分配、持续注意、心理旋转、视角转换、空间记忆、视觉追踪能力相关。 特别的,对于精细阶段较重要的对接偏差、成功率、碰撞次数等指标,距离知觉、方向知觉、速度知觉、持续注意、心理旋转、空间记忆、视觉追踪等能力作用较突出。
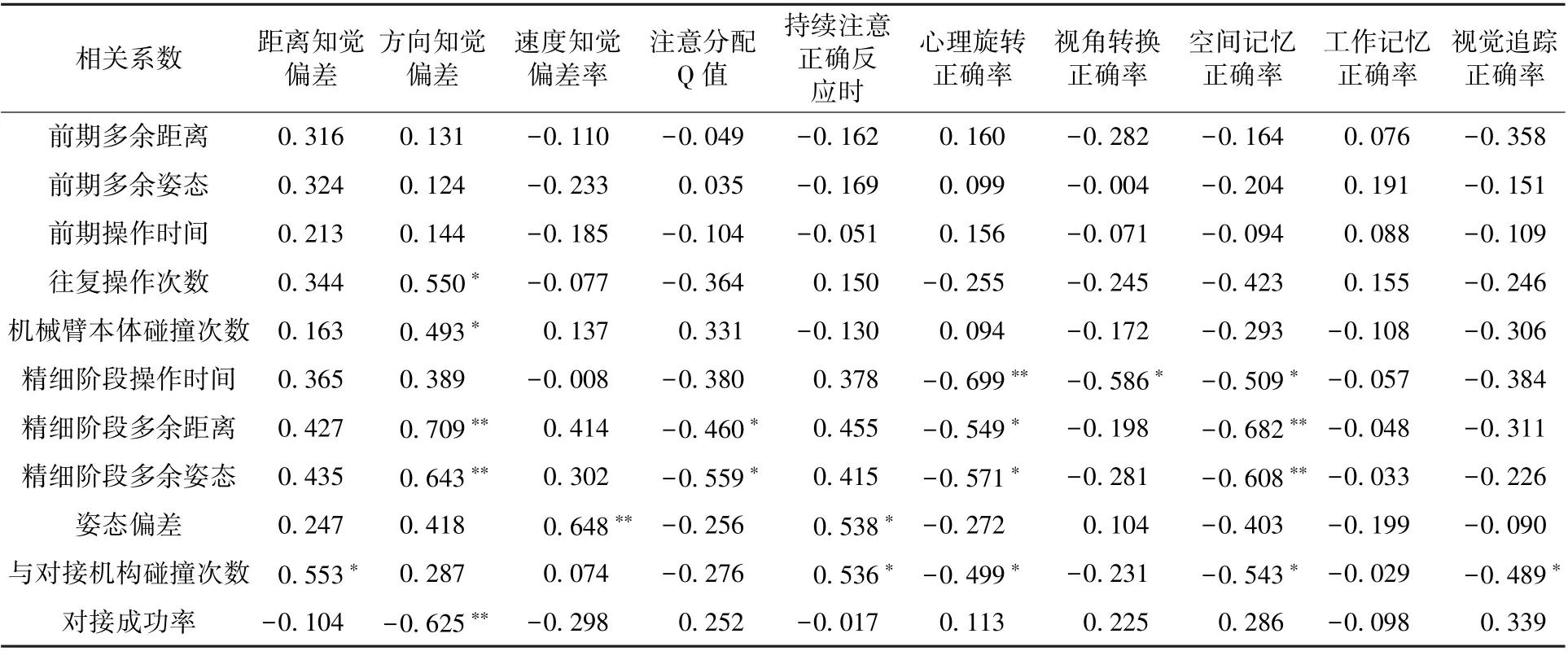
表2 基本认知能力与机械臂精细对接任务绩效及人误相关系数(n=20)Table 2 Correlation coefficient between basic cognitive ability test performance and MFD performance and human error (n=20)
3.2 操作能力
操作能力与机械臂精细对接任务绩效及人误相关分析结果见表3。 从表3 可知,前期阶段的操作主要与双手协调性相关,精细对接阶段的操作主要与定向控制、定点控制、速度控制、综合控制等能力以及手柄操作的准确性相关。 其中,双手协调控制能力与机械臂精细对接任务前期阶段的人误有关,主要反映在机械臂本体碰撞次数上;定向控制、速度控制、综合控制能力及手柄操作的准确性与精细操作阶段的操作效率有关,主要反映在精细阶段的操作时间绩效、多余距离操作、多余位姿操作、角度偏差等指标上;定向控制、定点控制、速度控制和综合控制能力与精细操作阶段的操作人误有关,主要反映在精细阶段与对接机构的碰撞次数指标上。
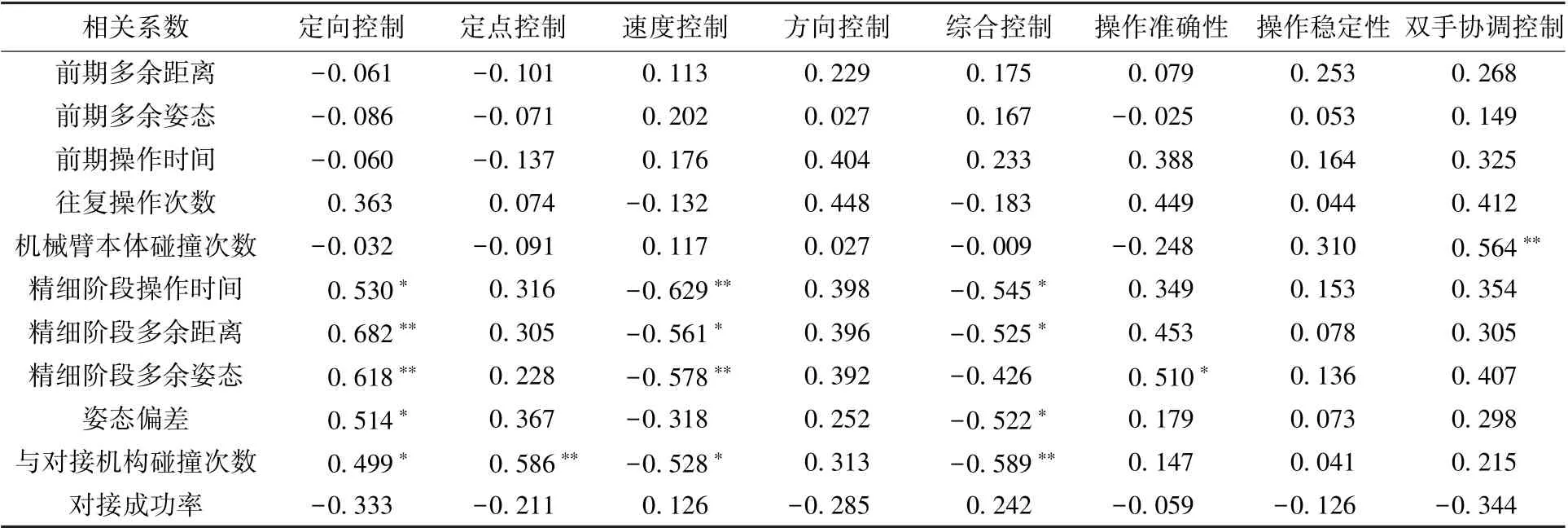
表3 操作能力与机械臂精细对接任务绩效及人误相关系数(n=20)Table 3 Correlation coefficient between operation ability test performance and MFD performance and human error (n=20)
根据相关性分析结果,梳理与机械臂精细对接任务不同阶段紧密相关的认知类指标如表4 所示,操作类指标如表5 所示。
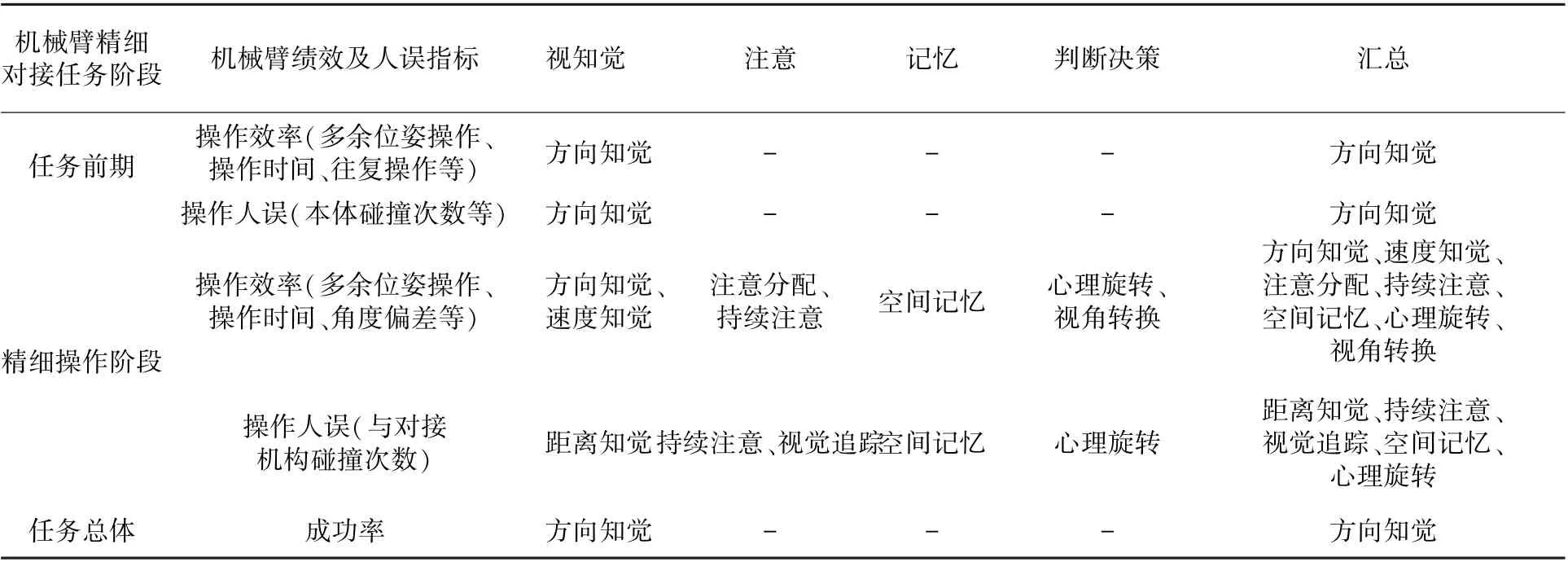
表4 与机械臂精细对接任务紧密相关的认知能力指标Table 4 Cognitive indicators closely related to the performance and human error of MFD tasks
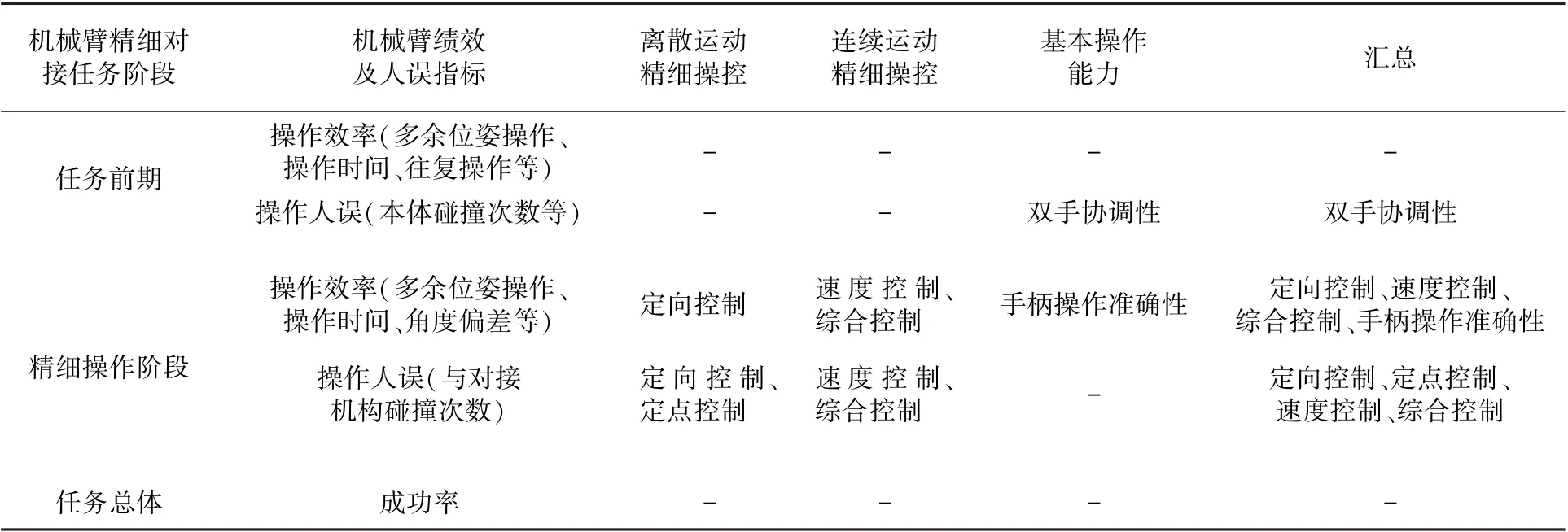
表5 与机械臂精细对接任务绩效及人误紧密相关的操作能力指标Table 5 Cognitive indicators closely related to the performance and human error of MFD tasks
4 讨论
本文研究结果表明,机械臂精细对接任务前期阶段绩效主要与方向知觉及双手协调控制能力相关;最后精细操作阶段绩效主要与距离知觉、方向知觉、速度知觉、持续注意、注意分配、心理旋转、空间记忆、视角转换、视觉追踪、定向控制、定点控制、速度控制、综合控制等能力及手柄操作准确性相关。 不同能力对机械臂精细对接任务2 个阶段的各项绩效及人误指标影响情况存在差异。
1)任务前期的操作效率。 任务前期,对机械臂任务场景信息的接收、目标方位的感知直接影响后续操作路径的规划,故较高的方向感知水平是提高前期任务操作绩效的前提。
2)任务前期的操作人误。 对机械臂运动方向、机械臂自身与周围设施环境相对方位的感知,有助于及时预判机械臂运动到达位置、提前监测机械臂本体的碰撞风险,从而减少人误。 双手协调控制主要体现在对位置和姿态的协调控制,机械臂运行过程中各关节角度会发生较大的变化,容易发生本体碰撞,通过对位置和姿态的协调控制可以较好避免由于位置变化引起的机械臂本体碰撞,减少人误和事故。
3)精细操作阶段的操作效率。 在精细操作阶段,3 个维度位置和3 个维度姿态信息的获取和整合以及手柄的操作对注意资源的需求较高,相对较高的注意分配能力有助于获取和整合各项信息,从而提高手柄操作效率,减少多余操作。此外,较高的心理旋转能力及视角转换能力有助于对相对姿态的快速判断,从而提高操作效率。较强的空间记忆能力有助于志愿者回忆对接目标的场景,对最后阶段的视觉信息进行回忆匹配,减少操作时长和多余操作。 方向知觉能力较强的操作者能更精准地定位机械臂的运动路径,减少位姿的重复调整。 速度知觉是人的视觉感知和时间感知结合后产生的感觉,较强的速度知觉能力有助于志愿者在进行机械臂任务操作时,更好地觉察到当下操作对应机械臂的速度变化,并基于速度判断进行手柄调整,提高对接精度。 持续注意能力考察志愿者对一个目标长时间注意的能力,精细操作阶段的机械臂任务需要志愿者对机械臂与目标的姿态偏差和位置偏差进行持续的监控,故较高的持续注意能力有助于提高对接精度。 定向控制能力考察志愿者能否快速、安全的按照指定路径进行操控,较高的定向控制能力有助于精细操作阶段操作效率的提升。 速度控制能力主要考察志愿者对手柄操作量的精细控制,速度控制能力强的人能更好地控制手柄操作量,减少冗余操作。 综合控制能力反映运动预判、注意分配、连续操作等综合调控能力。 综合控制能力越强,志愿者就能更准确地预判机械臂在手柄操作下的运动路线,能更精准地控制手柄完成对接任务,从而缩短精细阶段操作时长、减少多余距离调整,提高对接精度。 手柄操作准确性考察志愿者操控目标运动方向使其快速到达指定位置的能力,操作准确性越高的人,在调整机械臂的姿态过程中能更准确地通过操作手柄进行姿态调整,较少出现过度移动的情况。
4)精细操作阶段的操作人误。 精细操作阶段的人误主要体现在机械臂与对接机构的碰撞次数,机械臂与对接机构的碰撞有2 个主要原因:
一是相对距离的判断出现偏差,主要体现在距离知觉、心理旋转、持续注意、空间记忆、视觉追踪等能力上。 距离知觉水平越高,对相对位置的判断越准确,出现与对接机构的碰撞问题就越少。较强的心理旋转能力也有助于判断机械臂与目标之间的相对位姿,减少人误。 在对接过程中,志愿者需要持续注意机械臂与目标的相对姿态及距离偏差并进行调整,所以持续注意能力越强的人对距离也有更强的监控,出现的碰撞失误越少。空间记忆能力越强的人在操作的过程中也更能提前预知手柄操作带来的机械臂形态变化,更好地预防由于前进过多所导致的碰撞。 视觉追踪能力是指协调眼动跟踪和追踪物体的能力,视觉追踪能力越强的人,在精细操作阶段能更紧密地追踪自己的目标,而视觉是其他几项感知觉的基础,视觉追踪能力越强的人能更快速地察觉到机械臂形态的变化,感知风险,减少人误。
二是操作出现偏差主要体现在定向控制、定点控制、速度控制和综合控制能力上。 定向控制能力和定点控制能力越强,越能操控机械臂快速、安全地到达对接目标处,减少由于手柄操作方向控制不稳而导致的与对接机构的碰撞;速度控制能力越强的人越能控制好手柄操作量,减少人误;综合控制能力较强的人更能及时地运动预判,有利于躲避障碍物、避免碰撞。
5)任务总体的成功率指标。 方向知觉更有助于精准定位两者之间的相对位姿关系,有助于志愿者在机械臂任务中对位姿偏差做出良好的识别,更准确地判断是否恰好完成对接任务,这将在很大程度上决定任务成功与否。
通过以上分析可知,感知觉、注意和心理旋转能力这3 项基本认知能力的变化对机械臂精细对接任务有较为明显的影响作用,而这三项能力在空间飞行过程也是容易受到在轨失重、密闭以及长期繁重任务等因素的影响,导致能力的下降,因此,加强对这3 类认知能力的监测、训练和干预对在轨机械臂精细对接任务有关键意义。
此外,本文选取的样本量较小,今后可进一步扩大样本量开展研究。 建议针对基本认知及操作能力构建相应的机械臂精细对接任务绩效及人误预测模型,这对于航天员选拔训练、在轨认知监测及任务安排等均有一定意义。
5 结论
本文从基本认知能力及操作能力角度探究了机械臂精细对接任务绩效及人误的影响因素,包括10 项基本认知能力及8 项操作能力。 着重分析了每项影响因子与机械臂精细对接任务绩效及人误指标的相关关系。 结论如下:
1)距离知觉、方向知觉、速度知觉、注意分配、持续注意、心理旋转、视角转换、空间记忆和视觉追踪等9 项基本认知能力会显著影响机械臂精细对接任务的绩效及人误指标;
2)定向控制、定点控制、速度控制、方向控制、综合控制、手柄操作准确性和双手协调控制等7 项操作能力会显著影响机械臂精细对接任务的绩效及人误指标。
3)在选拔和训练机械臂精细对接任务的航天员乘组时,可对以上影响因素予以关注。
猜你喜欢
学苑创造·B版(2022年4期)2022-06-19
军事文摘(2022年10期)2022-06-15
作文大王·低年级(2022年4期)2022-04-23
快乐作文(1.2年级)(2022年2期)2022-04-15
商界评论(2022年1期)2022-04-13
数学大王·趣味逻辑(2019年10期)2019-11-06
草原(2018年2期)2018-03-02
消费电子(2017年4期)2017-05-04
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10