基于SLAM技术的普定大坝三维重建研究
2022-03-04 23:24卢斌王家志王贤发贺秋伟
科技资讯 2022年2期
卢斌 王家志 王贤发 贺秋伟

摘要:在大坝内部廊道的测绘任务中,激光扫描技术无法使用 INS 和 GPS 获取数据采集设备的位姿数据,导航系统的 SLAM工程是用于解决这一问题的核心技术,它可以充分利用激光扫描仪的场景数据,实现硬件平台的定位和外部环境的构建。该文综合应用多技术融合的室内定位导航技术、非闭环检测的误差校正技术和激光点云和全景影像融合等新技术,改变了传统测量方式,大大提高了大坝内外部空间实景三维数据的生产效率和数据精度。
关键词:SLAM 大坝三维融合
中图分类号:TU198文献标识码:A 文章编号:1672-3791(2022)01(b)-0000-00
Research on 3D Reconstruction of Puding Dam Based on SLAM Technology
LU Bin1 WANG Jiazhi1 WANG Xianfa1 HE Qiuwei2
(1. Puding Power Generation Company,Guizhou Qianyuan Electric Power Co., Ltd., Anshun, Guizhou Province, 562100 China; 2. Guizhou Jingwei Botong Technology Co., Ltd., Guiyang, Guizhou Province, 550081 China)
Abstract: In the surveying and mapping of dam internal corridor, the laser scanning technology can not use INS and GPS to obtain the pose data of data acquisition equipment. The SLAM project of the navigation system is the core technology to solve this problem. It can make full use of the scene data of the laser scanner to realize the positioning of the hardware platform and the construction of the external environment. This paper comprehensively applies new technologies such as indoor positioning and navigation technology of multi technology fusion, error correction technology of non closed-loop detection and fusion of laser point cloud and panoramic image, which changes the traditional measurement method and greatly improves the production efficiency and data accuracy of real 3D data in internal and external space of the dam.
Key Words: SLAM; Dam; 3D; Fusion
隨着智慧城市、文物保护、灾害应急响应、室内导航、虚拟现实等对室内精细化3D模型的需求越来越多,如何快速有效地获取室内3D精细化模型成为了研究热点。近年来,针对室内3D重建,出现了以3D激光扫描技术和近景摄影测量技术为主的测量手段[1]。相比较而言,3D激光扫描技术效率更高。然而,由于传统静态3D激光扫描技术不能实时快速地进行整体3D重建,所需工作量仍然较大。随着同步定位与地图构建(simulta-neous localization and mapping, SLAM)技术日趋成熟,室内3D实时快速重建成为可能。
1基于SLAM算法的移动测量
SLAM的基本工作原理是:当环境和自身位置无法确定时,机器人在运动过程中逐渐构建增量地图,实时估计自身位置和姿态,最终实现自身自主定位和导航[2]。近年来,国内外众多科研单位和企业将研发力量投入到SLAM技术在3D测绘领域的应用上。通过对核心算法的优化,打造了一款移动测量激光扫描机。可用于室外甚至室内的地下等非GPS环境下获取点云,进行三维建模[3]。这种基于SLAM的3D空间数据采集技术,兼具激光扫描和移动测量技术的优势,成为一种新兴的3D移动测量技术,在3D建模领域取得了重大进展[4]。
2任务概述
该次测量的对象为普定水电站,对大坝廊道内部和外部进行三维测量,该水电站站位于乌江上游南源三岔河中游灰岩峡谷河段中普定县梭筛村,距下游引子渡电站51km,距贵阳市125km,为河岸式电站。
水库正常蓄水位1145.00m,总库容4.209亿m3,为不完全年调节水库。电站装机容量75MW,设计年发电量3.16亿kw·h。电站于1989年12月2日开工,1995年5月30日竣工,投入运行至今已23年。
电站枢纽由碾压混凝土拱坝、坝顶开敞式溢洪道、右岸发电引水隧洞及厂房组成。最大坝高75m,坝体厚高比0.376。设4孔表孔溢洪道,孔口尺寸12.5×11.0m。右岸发电引水隧洞洞径8m,长280m。厂房位于坝后右岸,内装3台立式水轮发电机组。
该工程属二等大(二)型工程,其永久建筑物按2级建筑物设计,次要建筑物按3级建筑物设计。大坝防洪设计标准为100年一遇,设计洪水位1145.62m,设计洪峰流量5100m3/s;防洪校核洪水位1147.62m,校核洪峰流量6610m3/s。
3 技术路线
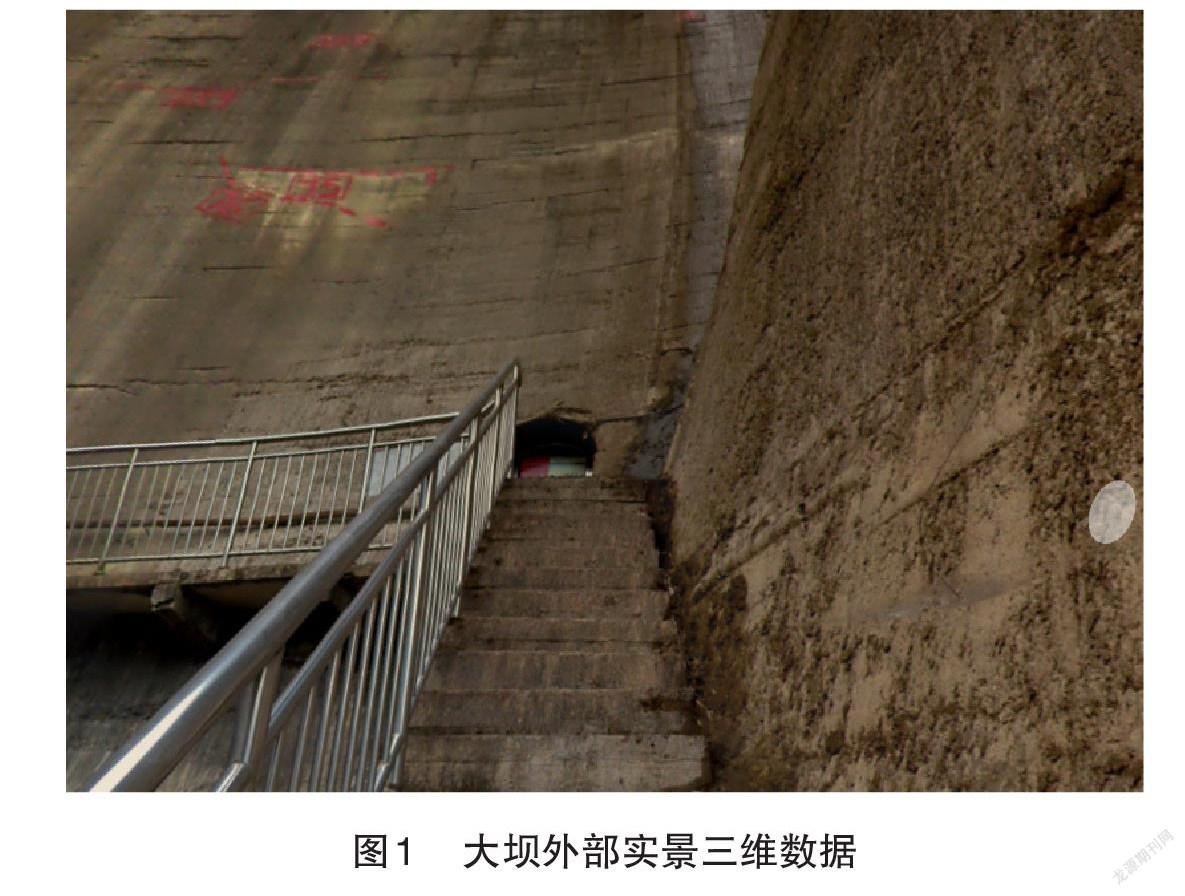
该文使用室内SLAM扫描系统,在整个测绘过程中,3台激光扫描仪始终保持运作。6台照相机在执行“停止—运行”程序时默认以1m间隔自动触发。通常情况下,需要视建筑大小把一个建筑物分成几个小范围区域扫描,可根据建筑平面图把室内划分成几个扫描区进行规划,在扫描完成后便可以自动生成清晰的现场实景三维数据,如图1所示。
3.1 点云拼接
对于一个完整的实体,一张图片的扫描信息一般不能显示该实体的所有特征。这需要在实体的不同位置进行多次扫描。因此,需要解决多幅图像之间的拼接和连接问题、同名点重合问题。扫描时,扫描仪的方向是随机且不确定的,需要连接两个或多个地图框,通常通过匹配名称相同的点来实现,此过程是为了获得间接地理配准[5]。选择地面上足够多的特征目标作为控制点,然后利用目标的高对比度特征来实现图像匹配和定位。扫描时,还需要使用传统的测量工具(如全站仪)获取每张扫描图上控制点的坐标和方位角,然后通过坐标转换和计算,得到Entity点云。在绝对坐标系中的位置。这些任务不能由计算机自动执行,许多任务需要人工参与,属于半自动化操作。
3.2 全景影像拼接
将多幅图像拼接成720°的全景图,由数据处理平台融合计算机视觉、计算机图形学、数字图像处理以及其他数学工具来完成,涉及的步骤主要有摄像机的标定、图像的畸变校正、图像的投影变换、同名点的选取、全景图像的拼接,图像的匀光匀色等[6]。
3.3 点云与全景融合处理
基于SLAM的3D激光扫描技术逐渐成为获取3D空间数据的必要手段,可以快速准确地获取大量可靠的空间数据。同时,高分辨率数码相机也可以获得高质量的二维数、空间数据纹理数据,两种特征描述正好互补。两者结合可以生成高精度的真实三维世界,为虚拟三维世界的构建奠定了良好的数据库。配准得到的彩色点云比强度表示得到的灰度点云更加生动可靠,通过激光点云构建场景的空间信息,将点云与图像精确融合,形成真正的三维数据库,如图2所示。
4 关键技术
4.1 多技术融合的室内定位导航技术
GPS信号不能满足准确的地下和室内定位和导航的要求。目前常用的室内和地下定位技术主要有无线定位、传感器定位、重合定位等。为了更好地提高定位的速度和精度,兼顾不同定位技术的优势互补。本文基于图像识别技术,利用Wi-Fi和蓝牙设备帮助获取大致的地理位置信息,以在比较图像结构之前缩小图像识别的搜索范围。最后,结合智能手机终端自带的精密传感设备,可以判断运动的加速度、角速度和气压,大大提高了定位的准确性、可用性和可靠性。
4.2 非闭环检测的误差校正技术
虽然SLAM扫描可以根据内部传感器确定的轨迹估计更灵活地创建内部地图,但很容易产生累积测量误差。目前,主要的解决方案是通过重复扫描定期通过的部分区域来建立“封闭路線”,并通过捕捉“已知”环境来生成准确的地图。但是,当遇到无法闭合的直线路径或传感器局部检测范围不完整时,该方法无法保证定位导航的实时性和准确性。为此,提出了一种独立于内部姿态估计并且可以应用于任何路径的实时地图校正方法,包括闭环和非闭环检测。其基本原理是采集SLAM锚点的真实世界位置坐标,并自动将其与采集到的数据集关联起来作为地理参考,从而优化最终测量数据集的误差。
4.3 基于空间信息的统一管理
无论是大坝内部廊道或者大坝外部,都通过空间信息化集成到统一的坐标系统和平台中。平台从大坝外到大坝内承载了区域内各类实体的空间数据,并且还可以加载各种专业数据,除了可以实现基于实景的可测量、可查询、可分析等基本功能外,还可以实现裂缝管理、对比等专业功能。此外,在各管理部门内部采用统一的数据,避免了信息的反复采集,极大地降低了人力物力的浪费。
4.4 激光点云和全景影像融合技术
三维激光点云可以精确地记录实体的空间数据,而高分辨率的全景影像又可以形象地展示实体的二维纹理,二者结合起来能够生成高精度的真实的三维世界。采用控制点坐标自动匹配技术,找到三维激光点云对应的影像像素,生成彩色点云,为后续三维模型的构建、构筑物结构属性的识别等提供形象而直观的参考。相反,用全景影像进行展示时,也可以通过影像的像素坐标找到与之对应的点云,实现对地物的量测运算,在数字大坝中有广泛的应用价值。
5结语
SLAM理论的发展打破了传统定位方式的局限性,充分发挥了传感器的自身优势,达到了良好的定位和环境构建效果。随着SLAM 理论在激光扫描测量领域的应用,激光扫描测量技术的测绘精度得到了很大的提高,因此激光 SLAM 技术也越来越受到重视。该文综合应用多技术融合的室内定位导航技术、非闭环检测的误差校正技术和激光点云和全景影像融合等新技术,改变了传统测量方式,大大提高了大坝内外部空间实景三维数据的生产效率和数据精度。
参考文献
[1] 徐博,葛奎,许邦鑫.基于三维激光SLAM技术的电力塔基地形测量方法[J].中国勘察设计,2021(S1):47-50.
[2] 陈焕剑. 基于激光SLAM的室内外背包移动测量系统关键技术研究[D].济南:山东科技大学,2019.
[3] 严立,井发明.3D SLAM移动测量技术在室内外一体化测量中应用[J].测绘与空间地理信息,2019,42(2):80-82.
[4] 黄荣恩.基于SLAM的三维激光测量技术研究[D].广州:华南理工大学,2018.
[5] 李品钰,霍亮,宋继哲,等.测量技术大坝三维监测报警信息系统研究与实现[J].矿山测量,2020,48(2):48-53.
[6] 邓汝艳,董蕾.航测与SLAM测量技术融合在房地一体中的应用[J].地矿测绘,2021,37(1):17-22.
猜你喜欢
工业设计(2022年1期)2022-02-09
考试与评价·高二版(2020年6期)2020-09-10
炎黄地理(2019年1期)2019-09-10
数码影像时代(2018年1期)2018-09-25
科学与财富(2018年7期)2018-05-21
百科知识(2018年6期)2018-04-03
少儿科学周刊·少年版(2016年4期)2017-02-15
特别文摘(2016年21期)2016-12-05