大中型立式水泵机组振动故障诊断技术研究
2022-03-04 00:18席傲然莫岳平王玉杰王建明毛新平任学强
科技创新与应用 2022年4期
席傲然,莫岳平,王玉杰,王建明,毛新平,任学强
(1.扬州大学 电气与能源动力工程学院,江苏 扬州 225127;2.山西省水利水电勘测设计研究院有限公司,山西 太原 030000;3.厦门品方工程项目管理有限公司山西省分公司,山西 太原 030000;4.山西省平遥县水利局,山西 晋中 030600)
大中型立式水泵机组的故障排查是保障泵站安全运行不可或缺的一环,立式水泵作为一种常见的水泵类型,若不进行定期故障排查,一旦出现故障再进行维修不仅会大大浪费人力、时间,更可能造成严重的安全事故。立式水泵机组的故障主要包括异常振动故障、轴承重度磨损和汽蚀等,其中振动是立式水泵机组故障的最常见表现形式。为了保障立式水泵机组的工作效率和安全可靠性,应对其进行定期振动监测,从而推断立式水泵机组是否出现故障。然而,不同的故障所导致的振动情况也有所不同,对检测信号进行处理分析,判断故障原因,从而提出相应改善措施建议也是十分必要的。因此,通过对振动信号进行监测分析,推断立式水泵机组的运行状况是否良好并在出现故障时及时进行维修是保障泵站安全稳定运行的有效方法之一。
1 立式水泵机组振动故障诊断技术发展过程与现状
我国的立式水泵机组振动故障处理方式的发展大体分为三个阶段:
第一阶段为事后处理阶段,当时由于人们设备维护与检修的意识薄弱,工具较为简陋,多数情况下不能够及时发现设备的异常状况,只能在发生故障后才进行修理,并且当时对于设备故障维修多依赖于个人的维修经验,修复时间长,周期长,对于故障类型不能够做到精确判断,对于大型立式泵站来说不能够进行及时的维修很容易造成重大经济损失。
第二阶段为预防性试验阶段,即按照固定计划,对水泵站进行定期的停运与检测维修。但对于立式泵站机组,预防性试验从本质来说是一种离线检测方式,需要水泵站全程停止运营才能够进行,并且对于全部件的拆装检测所需周期长,耗费人力物力大,可能伴随着操作不够灵活,对于故障的判断有所偏差等问题,难以满足泵站运行需求。
现阶段,由于互联网及人工智能等技术的快速发展,迅速衍生出了故障诊断技术。通过这种技术的发展与应用,现在可以安装传感器采集立式水泵机组的运行信号,对其进行处理与分析,并依赖于机器学习、大数据分析等一系列方法,在不进行停机的前提下对于立式水泵机组的运行状态进行评估,能够对立式水泵机组可能出现的故障问题进行预测以及定点判断,这样做不仅大大节约了人力物力和时间,还更有效地增强了立式泵站安全运行的保障,避免突发故障的发生[1]。
2 基于解析模型的立式水泵机组振动故障诊断方法
为了更好地描述实际工程中立式水泵系统故障情况,需要工作人员对通过传感器所检测到的信号进行分析,或估计出构建系统所需的物理参数,并通过结合物理参数的变化及实际出现的故障现象来建立立式水泵故障数学模型,从而可以对所出现的故障进行分析、预测、定位等。基于解析模型的立式水泵机组故障诊断方法大体可以分为3种:状态估计法、等价空间法以及参数估计法。
2.1 状态估计法
状态估计是一种根据检测数据来估计动态系统的内部状态变化的方法。即构建准确的立式水泵数学模型,并通过传感器测量设备的具体数值,自动排除系统因噪声或其他影响所带来的干扰信息,将两者数据进行对比,所得差值即可用来判断设备的故障情况。通过状态估计法可以对数据进行检测辨识,从而对立式水泵未来的工作状态进行预测。但使用状态估计法的前提是需要构建准确的数学模型,但目前是比较难以实现的,因此目前有关研究多集中于增强模型对于安装检测系统所带来的干扰、噪声等一系列误差的抗干扰能力[2]。
2.2 等价空间法
等价空间法是一种直接利用立式水泵系统模型输入与输出的测量值比较形成残差,由于静态等价空间法的实际应用具有较大的局限性,当前基于动态等价模型的等价空间法更为常见。
通过系统输入与输出的测量值形成残差后,比较所测残差与系统最优运行时的残差数据可以对立式水泵系统进行故障评价,当残差为零时对应立式水泵机组与我们构建的模型数据吻合,水泵机组运行正常,反之则有故障产生。然而实际的立式水泵机组因噪声等外界干扰存在误差,使得其在正常运行的范围内残差值也不为零[3],因此残差阙值的选择对于使用该种方法进行立式泵站故障诊断非常重要,若残差阙值选择过高,在立式泵站初期发生故障时残差偏差值较小,会出现不报警或漏报等现象,而残差阙值过低,因外界因素所引起的残差数据略微升高就会导致报警而立式水泵机组运行完好的情况[4]。综上而言,在使用等价空间法进行立式水泵系统的故障诊断时,需要注意残差阙值的选择。
2.3 参数估计法
立式水泵系统发生故障时,其发生故障部分的系统参数定会发生改变,从而导致其数学模型的参数也会发生变化,并且不同的参数变化所表示的立式水泵系统故障也不相同。也就是说,当在描述立式水泵系统故障时,可以通过模型不同程度的参数变化来表示。我们可以建立系统的参数模型并找到其与元件参数等量关系式:

其中:θ是建立的系统模型参数,p为我们建立系统模型的物理元件参数。
通过传感器测量得到实际机组参数θ',代入式中,可以得到实际物理元件参数p',通过p'和p标称值的比较,便可以得出立式水泵机组实际的运行状况是否良好,也可以通过p'值的大小来估计立式水泵机组物理元件的损坏情况[5]。因此,参数估计法的原理就是通过立式水泵模型的参数变化来对立式水泵机组的运行状态进行推测,也可进行参数对比找到故障源。但与状态估计法相类似,在实际的工程中较难得到精准的数学模型,并且对于等价关系式的建立也存在缺少参数、参数估计不准确等一系列情况,因此也存在一定的缺陷。
3 基于信号处理的立式水泵机组振动故障诊断方法
当系统的数学模型难以建立时,就能够体现出基于信号的处理方法的优势。该方法不用建立繁杂的立式水泵系统模型,直接利用信号模型或特征提取的方法进行故障检测与故障分离,具有适用性强的特点。原本绝大多数的基于信号处理的故障诊断方法都是针对线性系统提出的,但由于其可以提取信号进行处理,因此极易转化为非线性系统,常见的方法有3种,分别是频谱分析法、主元分析法以及小波分析法。
3.1 频谱分析法
频谱分析法是立式水泵机组故障检测方法中最为常用的方法之一,通过传感器采集立式水泵机组的振动数据可以通过频谱分析分解成振动信号频谱图。频谱图可以非常直观地看出立式水泵机组的运行情况,图中幅值的最突出部分可以与故障情况充分联系在一起,并提供诊断信息。
频谱分析法一般依赖于傅里叶变换即

其中:X(f)表示信号所分解出的频率曲线的幅值大小的分布情况,ϕ(f)称为相位谱,可以表示频率曲线的相位分布情况。
3.2 主元分析法
主元分析法的主要原理是将高维信息通过线性变换的方法降维从而构成一个新的低维变量,且产生的新的低维变量是原高维变量的线性组合。通过分析新低维变量产生的信息从而推论原高维变量数据所包含的变化信息,比较这些数据变化值的方差大小确定主元模型,一旦传感器的实测信号与主元模型信号不一致,就可以判定立式水泵机组发生了故障,并且可以很方便处理数据并进行故障分离。
使用主元分析法进行立式水泵机组的故障诊断过程需要我们着重关注两个变量的情况,通常在主元子空间建立Hotelling T2统计量进行统计检验,在残差子空间中建立平方预测误差(Squared Prediction Error,SPE)统计量进行统计检测。主要步骤如图1所示。

图1 主元分析法步骤示意图
使用主元分析法进行故障检测可以将复杂的问题变得简单、直观,且能够提供原有指标的大部分信息,使得数据集更容易使用。但这种方法同时也存在一定的局限性:若存在被噪音污染的数据,标准化后噪声的影响会更加显著;对降维最终得到的数目,也就是潜在的隐变量的数目,不能很好地估计[6]。
3.3 小波分析法
频谱分析虽然是一种便捷实用的故障检测方法,但对于大中型立式水泵机组来说,频谱分析进行傅里叶变换可能并不存在,为了详尽表达信号在局部的特征,使用小波分析法检测故障应运而生,弥补了傅里叶变换在立式水泵故障检测中的不足之处。小波变换的基础建立在短时傅里叶变换之上,在立式水泵机组采集信号不稳定的情况下占据很大的优势,具有良好的时频特性。从系统上来看,小波分析的信号处理方法相当于给采集信号添加带通滤波器,在分析立式水泵机组的运行状况时,对传感器采集的振动信号进行小波变换,可以有效区分突变信号与噪声,具有非常强的抗噪能力和实时性,检测效率高,且对多分量的信号分析而言非常便捷。应用小波分析法检测立式水泵机组故障情况的工作流程如图2所示。
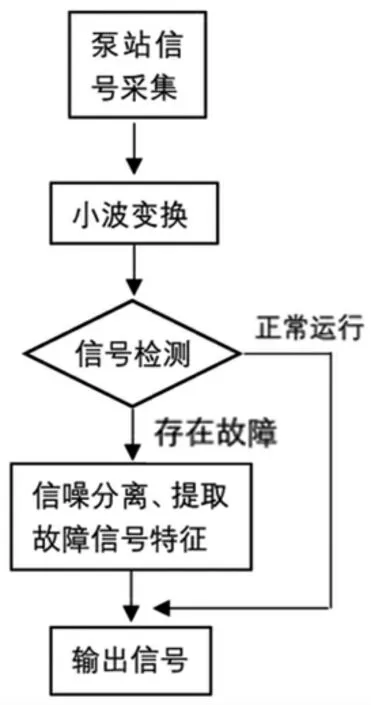
图2 小波分析在立式泵站故障诊断中应用工作流程图
文献[7]给出了以下几种利用小波分析法进行故障诊断的方法,可以对立式水泵的故障监测与诊断提供很好的思路:
(1)利用小波信号分析直接检测信号突变的奇异点,从而实现对立式水泵的故障监测。
(2)利用小波分析进行信号频率结构变化观测,可以有效地实现对立式水泵的故障监测。
(3)利用立式水泵机组系统发生故障会导致脉冲函数的变化,从而导致少量小波变换系数产生变化来判断立式水泵机组是否产生故障。
小波分析法应用于立式泵站故障检测,能够十分便利地将采集到的故障信号进行多维度分解,从而获得不同的信号特征,进而实现对于各个部分故障程度的区分,是一种非常实用的检测方法。
4 基于知识的立式水泵机组振动故障诊断方法
基于知识的故障诊断方法与基于信号处理的故障诊断方法相类似,都不需要建立精确的立式水泵模型,这种故障诊断方法不断积累以往人们的故障诊断经验,充分利用统计知识,并将存入的信息与诊断对象进行充分比对,从而精确判断设备是否发生故障以及设备的故障类型。主要方法分为专家系统方法、人工神经网络法和模糊故障诊断法等。
4.1 专家系统方法
如图3所示,专家系统方法其实就是存入大量现有故障信息,在采集到立式水泵系统的检测信号后,通过综合性比对,进行快速的分析处理,通过一系列演算推理后能够定位具有可能性的故障位置及其产生的具体原因。它的系统存储库中储存着大量的故障原因、征兆、表现形式、建议处理意见等数据,因此只需将所测信号与已知数据进行不断比对,从而推算出最为相近的最优解。专家系统方法在立式水泵的故障诊断中已经具有了较为广泛的应用,但这种方法存在一定的局限性,那就是由于知识库内容是有限的,对于没有出现过的故障数据无法进行演算推理。

图3 专家系统方法原理示意图
4.2 人工神经网络法
近年来,人工神经网络法在立式水泵的故障诊断中应用广泛,它是一种基于模仿人的神经网络对所获得的复杂信息进行自主处理的方式,具有自学能力、自组织、自适应的非线性动力学系统,如图4所示。与专家系统法相比,人工神经网络的优势极大地体现在其学习能力上,它的推理是一种数值计算过程,具有分析处理能力以及很强的识别、记忆、联想功能,可持续获取新的知识,并将其运用在解决专家系统不能处理的问题上[8]。
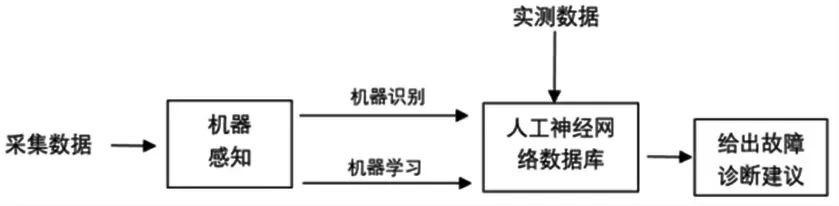
图4 人工神经网络法示意图
人工神经网络的数据库具有很强的通用性和容错性,并可以对于复杂的非新型系统进行处理分析,通过不断地学习新知识并应用于推广,可以构建适应性强、容错率高的数据库,进行故障类型分析识别后给出故障处理建议,具有很广泛的应用范围。但实际运用时也存在一些缺陷:与专家系统方法相似,人工神经网络也需要大量的基础数值支撑,进行学习时的过程无法观测,可能会影响结果可信度,且对样本选取也有一定的要求[9]。
4.3 模糊故障诊断法
模糊故障诊断法简单来说就是基于立式水泵机组故障发生的征兆与故障本身之间建立模糊矩阵并将其转化为模糊方程,通过模糊变换求得征兆与故障之间的关系。具有应用方便,结论直观的优势。基于这种方法,结合立式水泵的数学模型难以精确建立的现实情况,我们可以利用模糊方程表示立式水泵机组的振动情况,从而判断立式水泵的故障原因。但模糊故障诊断法不具备自学能力,且征兆与故障间的关系平衡难以掌握,隶属函数、特征元素等的选取也存在偏差,一般可以将模糊故障诊断法、神经网络与小波分析等方法结合使用[10]。
5 结束语
现阶段,立式水泵在中国的水利系统中应用越来越广泛,如供水、工业增压、液体输送、灌溉等等,因此立式水泵机组的故障诊断研究并不仅仅局限于此,其故障监测与诊断技术也应成为研究的热点。本文通过基于解析模型、信号和知识处理方法3个大方向,总结了多种常见的立式水泵机组故障检测方法,并进行了分析与优缺点对比。
基于解析模型的处理方法通过构建立式水泵的模型,通过将立式水泵模型的参数与实际采集数据进行对比来判断立式水泵机组的运行状况,这种方法可以通过数据非常直观地判断是否有故障出现,但要精确建立立式水泵机组的数学模型具有很大的难度。基于信号的处理方法是现在较为常见的方法,不需要进行数学模型的建立,直接对采集的数据进行分析与处理,适用性强。基于知识的处理方法依赖于数据库的建立,需要长时间的积累与学习才能够对立式水泵机组的运行状况进行较为准确的判断,一旦知识库建立较为完善后可以直接判断立式水泵机组的故障位置、故障原因以及给出维修建议,会给立式水泵机组的维修提供很大便利。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年4期)2022-08-17
网络安全与数据管理(2022年3期)2022-05-23
水泵技术(2021年5期)2021-12-31
昆钢科技(2021年1期)2021-04-13
北京航空航天大学学报(2020年10期)2020-11-14
自动化学报(2019年6期)2019-07-23
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
中国交通信息化(2017年9期)2017-06-06
中国惯性技术学报(2015年1期)2015-12-19