
基于三维激光扫描技术在地铁隧道形变监测的应用研究
2022-03-05 09:02徐涛
自动化与仪表 2022年2期
徐 涛
(新疆铁道勘察设计院有限公司,乌鲁木齐830011)
随着铁路的高速发展,对铁路隧道形变的测量是必不可少的,测量的隧道形变数据对于地铁运行状态的安全是十分重要的,传统的形变测量方法也有许多,这些方法虽然有较高的精度,但测点数量较少,无法全面反映隧道的形变。
针对上述传统测量方法存在的不足,相关文献也有相应的研究,文献[1]基于巴塞特收敛系统的地铁隧道性变监测,该方法能够精准的测量隧道的变形数据,并且能够定位变形坐标,但该方法对测量的点数较少,不能够全面的对隧道进行整体测量,不能全面反映隧道的变形;文献[2]提出了一种移动激光扫描仪进行对地铁隧道形变监测,该方法能够全面的测量隧道形变,并且测量的准确度较高,但该方法对于测量的速度较慢,每测量一段区域,就需要进行移动。
基于上述文献中存在的问题,本文提出了基于三维激光扫描技术的隧道形变监测,设计了三维振镜式激光扫描系统[3],完成了地铁隧道变形的监测。
1 三维激光扫描系统的设计
本文设计了一个三维振镜式激光扫描系统,包括控制系统、激光器、光学系统和振镜扫描系统[4],三维振镜式激光扫描系统结构如图1所示。

图1 三维振镜式激光扫描系统结构图Fig.1 Structure diagram of a three-dimensional galvanometer laser scanning system
控制系统是整个三维激光扫描系统的核心部分,扫描控制卡与上位机系统相连接,实现上位机到扫描控制卡的数据传输,控制系统与上位机系统之间的通信方式采用的是PCI 总线,该总线具有高速、兼容性强、即插即用以及支持设备主控的特点,实现二者之间稳定且高速的传输数据。控制系统中还采用了PCI9052 和FPGA 芯片,PCI9052 芯片是一款160 针的低功耗CMOS 芯片,采用了PQFP 封装的目标模式的接口芯片[5],PCI9052 芯片的引脚功能如表1所示。

表1 PCI9052 芯片引脚功能描述Tab.1 PCI9052 chip pin function description
PCI9052 可以实现异步操作,PCI9052 本地总线与PCI 总线采用不同的时钟频率和电平标准,使得软件设计更加灵活,支持发送和接收操作。FPGA 芯片具有强大的逻辑控制功能,能够实现复杂的时序逻辑,并可在内部调用双端口的RAM 缓冲数据,极大的减少了中断响应频率,确保数据的稳定传输[6]。
三维振镜式激光扫描系统首先需要获取三维零件截面的信息,通过上位机将三维零件的截面信息发送给控制系统。控制系统收到上位机发送的信息,将进行图形识别、扫描路径优化、图形插补、激光开关控制、聚焦模块聚焦信号计算等过程,得到数据信号控制激光器的激光输出、动态聚焦模块和两轴扫描仪的扫描角度,可以将激光束精确聚焦在整个扫描面上的焦点上,并按照所需的路径进行激光烧结。
振镜扫描系统采用X 振镜和Y 振镜,使激光产生快速而精准的指向,实现单层界面的加工。光学系统确保光束在传输过程中的光束质量,保证隧道测量的精确度[7]。
2 关键技术
2.1 地铁隧道形变监测数据通信系统
本文研究的三维激光扫描技术在地铁隧道形变监测,对于监测到的形变数据传输给工作人员是十分重要的,因此该章节进行对地铁隧道形变监测数据通信系统的研究。地铁隧道形变监测数据通信系统如图2所示。

图2 地铁隧道形变监测数据通信系统结构图Fig.2 Structure diagram of subway tunnel deformation monitoring data communication system
本系统采用的是主从的通信方式,站级三维激光扫描形变监测系统将采集到的数据通过无线信号收发器,传输给监测数据库。该通信方采用RS485总线将所有的三维激光扫描形变监测系统都连接起来,为了方便与上位机进行数据通信,数据的接收和发送采用无线信号,三维激光扫描隧道形变监测系统采集到的数据线储存在PLC 中,通过无线方式将数据发送到上位主机[8]。该系统采用RS232 和RS485 转换器,RS232 是一种串行通讯接口,该接口电路采取不平衡传输方式,具有联络控制信号的特点;RS485 在数据传输过程中,采用增加中断的方法进行对信号放大,增加光纤传播介质,实现了数据远距离的通信。
在上位机与PLC的数据传输通讯协议中,忽略了对PLC 状况的监测。事实上仅使用了数据请求帧的发送和数据帧的接受。在数据传输的过程中,数据长度与下一个发送的数据位数相等,由于每次发送的数据位数较多,除CRC 校验外,增加了一个校验数据对错的方法,要将采集数据进行多次发送,为了让上位机能将截断的数据进行很好的整合。使用规定的通信协议可以使通信过程规范简洁,保证接收数据的准确性,为数据融合和检测信息的发布奠定基础[9]。
2.2 基于点云隧道三维建模算法的地铁隧道形变监测
本文研究了一种基于点云隧道三维建模算法的地铁隧道形变监测,用于获取地铁隧道的相对变形信息,点云隧道三维建模算法的流程如图3所示。
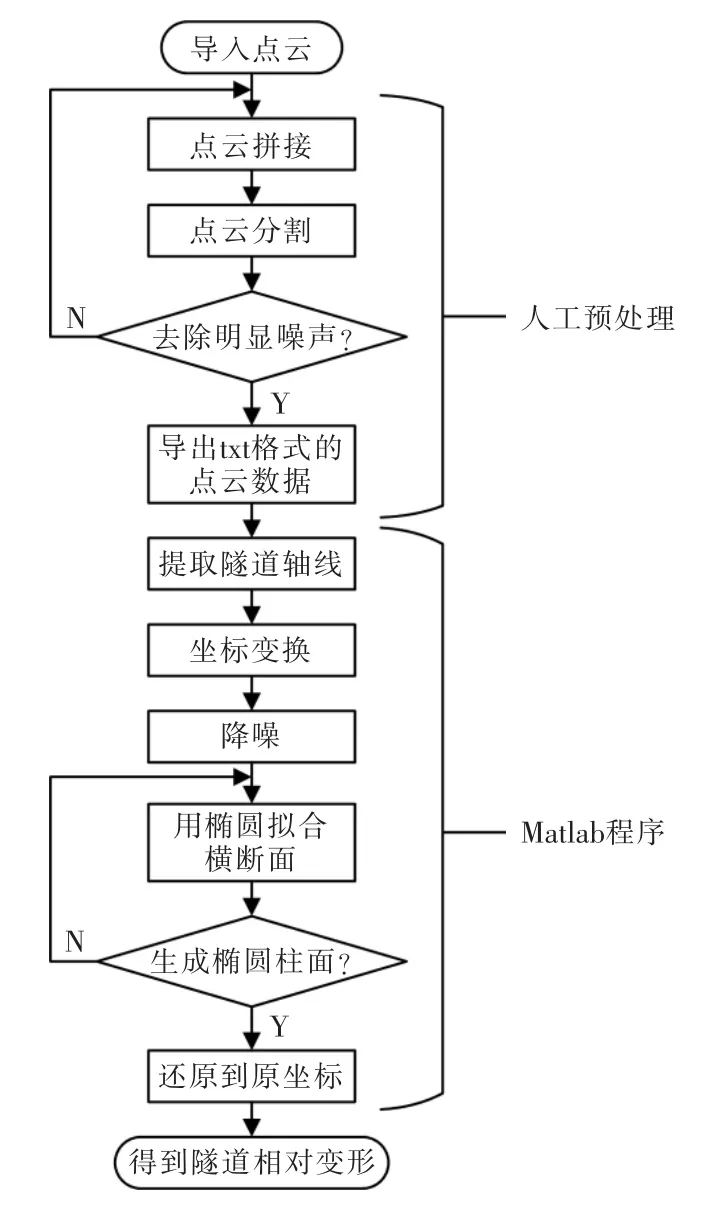
图3 点云隧道三维建模算法流程Fig.3 Flow chart of point cloud tunnel 3D modeling algorithm
完成地铁隧道变形的监测需要4 个步骤:
步骤1地铁隧道的轴线提取方法
首先对隧道的原始点进行预处理,将隧道的原始点云数据转化为txt 格式,为了使Matlab 程序进行进一步处理,将采集到的点云导入处理软件中[10]。
地铁隧道的轴线提取方法是对分割后的隧道点云进行圆柱面拟合,把圆柱面的轴线作为该段隧道的轴线。最小二乘法用于求解未确定的几何参数,根据空间几何理论,圆柱面有5 个独立的未定参数[11],即y0,z0,λ,ϕ,R,其中y0表示轴线上固定点的y轴上的点;z0表示轴线上固定点的z轴上的点;λ 表示轴线与x轴正半轴的夹角;ϕ 表示轴线与x轴负半轴的夹角;R表示圆柱底面半径。点云中任一测点到圆柱面轴线的最短距离的计算表达式为

式中:pi=(xi,yi,zi)表示起初点云中随意一个测点的坐标;c=(x0,y0,z0)表示圆柱面轴线上的一个固定点;表示圆柱面的轴向单位向量[12]。因为地铁隧道形变非常小,因此设圆柱面的半径为隧道的内半径R,则独立的待定参数为4 个,即y0,z0,λ,ϕ。圆柱面拟合即求最优解:

式(2)中描述的最优化问题用Matlab 的Fmincon函数进行求解,本文提出了一种改进圆柱面拟合算法,使用少量点云进行圆柱面拟合,将拟合结果作为初始值对大量点云进行柱面拟合,从而节省了大量的计算时间。稀释圆柱拟合点云,从而减少计算时间并保持一定的计算准确度[13]。删除残差较大的点后,再次进行圆柱面拟合,以提高计算准确度。
输入隧道点云,形成三维坐标矩阵为

将点云减少到100 个点,形成三维坐标矩阵为



步骤2地铁隧道的坐标变换即投影
为了进行三维建模,需要对点云进行坐标变换,为了计算方便,使坐标轴与隧道轴线方向一致,坐标原点位于隧道轴上。坐标变换后把点云投影到yoz平面,以便于进行降噪。




通过步骤2 对地铁隧道点云进行坐标变换和投影。
步骤3地铁隧道的降噪及平差
本文提出了一种基于误差分布统计规律的降噪方法,根据测量学的误差分布规律,由于测量的偶然误差,同一角度的半径坐标将呈正态分布,即当I=时,有:

为了避免I=Ø,可令Δθ 较小时式(13)成立。
结合式(13)可进行降噪处理,将点云分成360组,即令θ0={0°,1°,2°,…,359°},Δθ=0.5°,计算半径与点云数量的关系。
降噪后,相同角度的半径坐标仍然不相等。为了提高椭圆柱的拟合准确度,需要进行调整,将相同角度半径坐标的测量值调整为平均值。调整后重新形成三维坐标矩阵,用柱坐标系表示。
步骤4地铁隧道三维建模及形变分析
通过建立椭圆柱面三维模型,使隧道变形可视化,首先,导入用柱坐标系表示的三维点云坐标矩阵,采用椭圆拟合算法EFA,将二维的隧道轮廓线点云拟合成椭圆:


把椭圆柱面各个点的径向位移ρe-R作为变形量,生成三维的径向位移云图,将坐标进行逆行变换,得到,即三维建模的变形分析。
3 实验结果与分析
为了测试三维激光扫描技术在地铁隧道形变监测中的精度和可靠性,并对此做了相关的实验,首先进行模型的搭建,本实验选用Proteus 进行实验模型的搭建,试验环境参数如表2所示。

表2 实验环境参数Tab.2 Experimental environment parameters
本实验采用的是远程监测,监测的数据传输至办公区,该实验的实验架构如图4所示。

图4 实验架构图Fig.4 Experimental architecture diagram
本实验采用的数据是某地铁隧道的一段隧道管节进行变形测量,该隧道的相关数据为,隧道内径4 m,管节宽度2 m,椭圆长轴为4005 mm,椭圆短轴为4000 mm,采用三维振镜式激光扫描技术、文献[1]技术和文献[2]技术分别对该隧道形变进行检测,献策结果进行对比。首先对测量的精准度进行对比,实验中记录的数据如表3所示。

表3 实验结果数据Tab.3 Experimental result data
测量精准度实验结果对比如图5所示。

图5 测量精准度实验结果对比Fig.5 Comparison of experimental results of measurement accuracy
由图5 可知,本文研究的基于三维激光扫描技术的地铁隧道形变监测与实际隧道的数据相比,椭圆长轴差值为0 mm,椭圆短轴的差值为1 mm;文献[1]与实际隧道的数据相比,椭圆长轴差值为4 mm,椭圆短轴的差值为8 mm;文献[2]与实际隧道的数据相比,椭圆长轴差值为1 mm,椭圆短轴差值为2 mm。由此可见本文研究的基于三维激光扫描技术的地铁隧道形变监测所测得的准确率最高。
在上述实验的基础上,对实验的性能进行测试,本次测试是进行对多段隧道形变测量时,所消耗的时间的对比,测量消耗时间实验结果对比如图6所示。

图6 测量消耗时间实验结果对比Fig.6 Comparison of experimental results of measurer consumption time
由图6 可知,本文研究的基于三维激光扫描技术的地铁隧道形变监测系统在对10 段隧道进行形变监测时,消耗了20 s;文献[1]在对10 段隧道进行形变监测时消耗了28 s;文献[2]在对10 段隧道进行监测时消耗了32 s。由此可见,本文研究的系统进行隧道形变监测所消耗的时间最好,所以对隧道的形变监测最快,因此性能最高。
4 结语
由于传统的隧道监测系统测点数量较少,无法全面反映隧道的形变,设计了三维振镜式激光扫描系统,包括控制系统、激光器、光学系统和振镜扫描系统,采用PCI 总线,实现数据高速、稳定的传输,采用PCI9052 接口芯片,来实现PCI 总线和底层控制芯片FPGA 的数据传输。采用X 振镜、Y 振镜以及光学系统确保光束的质量,实现三维激光扫描技术。本文研究的系统还存在着一定的不足,在对隧道形变监测时,在复杂的环境下,可能对隧道的形变监测出现精准度下降的问题,因此还需进一步研究,来应对复杂的环境。
猜你喜欢
云南画报(2021年9期)2021-12-02
今日农业(2021年17期)2021-11-26
昆明医科大学学报(2021年6期)2021-07-31
中国外汇(2019年6期)2019-07-13
电子制作(2018年12期)2018-08-01
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
小天使·四年级语数英综合(2016年11期)2016-11-29
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
互联网天地(2016年2期)2016-05-04
