无人机用于形态复杂实验对象量测的精度分析
2022-03-06 01:07和文斌甘淑袁希平
城市勘测 2022年1期
和文斌,甘淑,袁希平
(1.昆明理工大学国土资源工程学院,云南 昆明 650093;2.云南省高校高原山地空间信息测绘技术应用工程研究中心,云南 昆明 650093;3.滇西应用技术大学云南省高校山地实景点云数据处理及应用重点实验室,云南 大理 671009)
1 引 言
随着信息技术的不断发展,测绘的仪器和技术得到了飞快发展[1],尤其是无人机摄影测量技术被应用到更多的行业之中。对于形态结构复杂的对象,传统的二维信息已经不能满足人们对于复杂物体的量测描述,而需要通过三维立体模型直观地呈现出来。为了更直观、更全面地呈现出研究对象的三维信息,各种三维建模的技术呈现出井喷式的发展。相对于测绘行业而言,当前根据测量方法来进行三维建模的方法主要有三种:首先是传统的测量方法[2],利用全站仪采集单点的数据,采集后的数据再用CAD软件完成三维模型的构建,该方法建立三维模型节约成本、可以提高平面模型的精度,但是建出来的三维模型精度低,在后期有大量的修补工作,对复杂对象的测量效率较低,仅适合于部分数据的建立。其次是随着三维激光扫描技术[3]和无人机摄影测量技术[4,5]的快速发展,将传统的单点测量采集数据模式发展到扫描模式采集数据以及无人机摄影测量的方式。利用三维激光扫描仪进行外业测量方法相对简单,可以大面积获取研究对象的点云数据,三维模型精度很高;但是获取的数据量大、后期内业数据处理工作量大、点云数据冗余量较大,而且三维扫描仪成本高,不易于大范围的推广使用。无人机倾斜摄影测量技术,用无人机采集原始影像,像控点坐标来进行控制,进行空中三角测量,再用空三加密的成果来重建三维模型。该方法应用于数字城市模型的建设[6],数据处理速度快、模型成果精度高、可以处理大范围模型数据。该方法具有自动化程度高,工作周期短、人工干预较少、操作简便,成本低等优势。无人机测绘成为近年来热门发展的领域。无人机飞行平台可以搭载多种传感器,获取地面的影像,得到点云数据,这些数据可以生成4D产品,即数字正射影像(DOM)、数字高程模型(DEM)、数字线画图(DLG)、数字栅格图(DRG)[7,8],可以快速地获取实景三维模型。近年来,由无人机倾斜摄影测量进行三维景观的重建得到了不断的推广,将无人机技术不断地应用到三维重建的工作中,并且受到了广泛测绘工作者的青睐。
目前,无人机的种类也有很多,按结构可分为固定翼、旋翼、无人直升机和垂直起降无人机[9]。本文选用四旋翼大疆精灵4RTK无人机,基于无人机倾斜摄影测量技术构建三维模型的优点,设计3个不同的飞行方案,对位于昆明市五华区的昆明理工大学莲华校区内的一个形态复杂的雕塑进行数据采集,利用Context Capture软件进行自动化建模型[10]。结合GPS-RTK采集的控制点数据,通过对三维模型进行平面精度、高程精度、特定边长度以及三维模型纹理信息的分析,验证了应用无人机倾斜摄影测量技术构建三维模型的可行性,为今后进行复杂地物探测航测路线规划与三维实景重建提供一定的技术参考。
2 实验数据采集
2.1 实验区选择
本次实验工作选择在云南省昆明市五华区昆明理工大学莲华校区内,主要是对校园内的雕塑场景进行三维重建。实验区如图1所示,整体呈块状,长约为 130 m,宽约为 100 m。研究场景中的主题雕塑底座是圆柱体,中间由不规则的大理石堆砌而成,顶部是一侧躺式不规则的形态复杂人体造型。

图1 实验区选择
2.2 实验数据采集
本次研究采用的影像是由大疆精灵4RTK无人机倾斜摄影的遥感影像,分别使用3个不同方案,共获取247张影像,由于校园地势相对平坦,采集数据范围较小,所以选定雕塑周围的4点作为控制点,由GPS-RTK实测控制点的坐标作为坐标真值。无人机的参数如表1所示,控制点分布如图2所示。
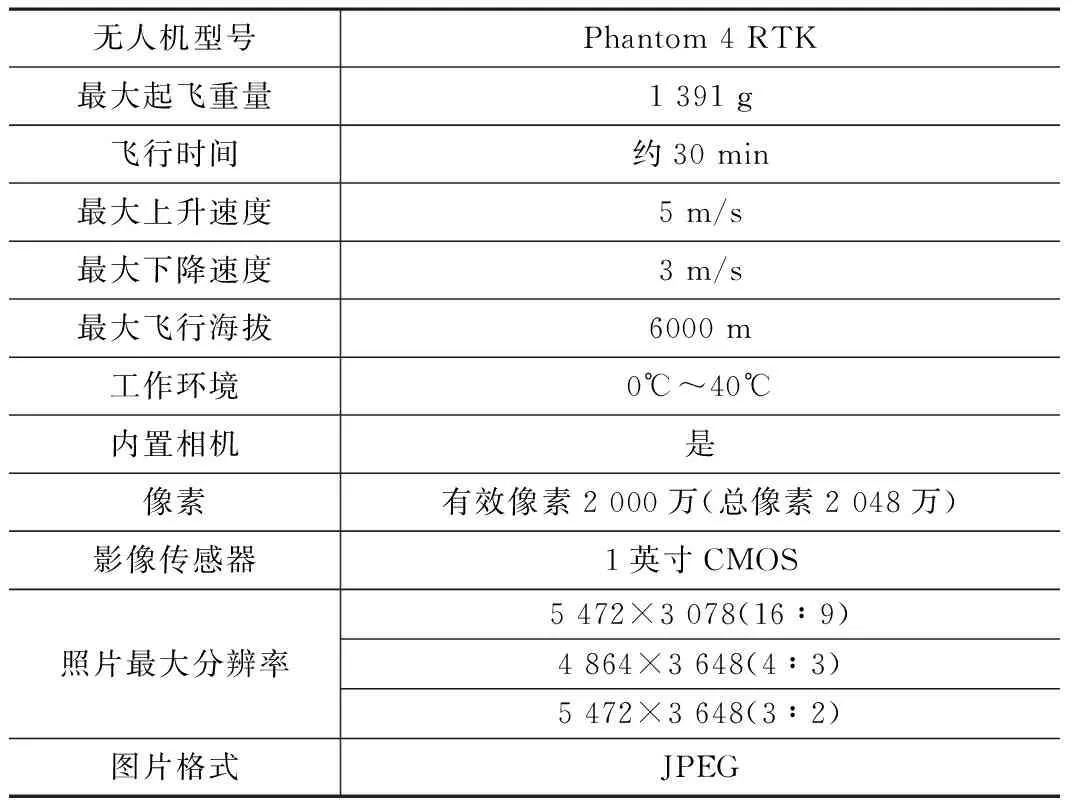
无人机参数信息 表1

图2 控制点分布
实验工作利用了大疆精灵4RTK无人机对测区进行数据采集。本次实验分别设计3个不同的飞行摄影方案,其中:方案一是将无人机的飞行角度设置为右视飞行,镜头的拍摄角度为60°,无人机的航高设置为 25 m;方案二无人机的飞行方向为井字飞行,镜头的拍摄角度为60°,无人机的航高为 25 m;方案三无人机的飞行方向为前向飞行,镜头的角度为90°,无人机的航高为 65 m。为了获取更高精度,减少周围环境带来的影响,将无人机的航向重叠度和旁向重叠度分别设置为80%和70%,确保影像数据的完整。
按以上的方案进行3个架次的飞行,第一架次方案一采集了58张影像,第二架次方案二采集了112张影像,第三架次方案三采集了77张影像。本次实验的方案设计参数如表2所示,具体航线设计如图3所示。
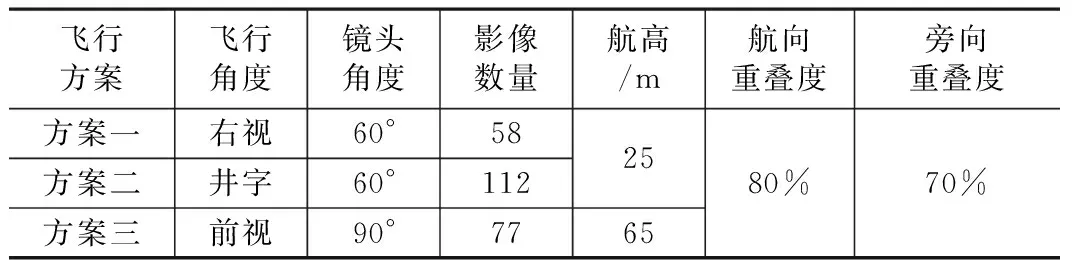
飞行参数 表2

图3 航线设计
3 数据处理及结果分析
3.1 三维建模
研究中采用大疆精灵4RTK无人机获取的数据,将方案一采集到的数据导入到Context Capture软件中进行三维建模时,选择照相机为DJI6310R,感应器尺寸为 12.833 3 mm和焦距大小为 8.8 mm,然后检查影像文件,提交空中三角测量进行处理以实现场景三维建模。具体技术路线如图4所示。
为了提高建模的精度,导入控制点,进行对应同名点刺点处理,再次提交工程进行空三运算处理,随后进行新建重建项目,由于3个方案的影像数量较小,所以空间框架中不进行切块设置,随后提交新的生产项目,模型构建的成果选择为三维网格格式,空间参考系统选的是WGS84/UTM zone 48N,完成设定,提交生产项目,得到三个方案对应的场景三维模型。
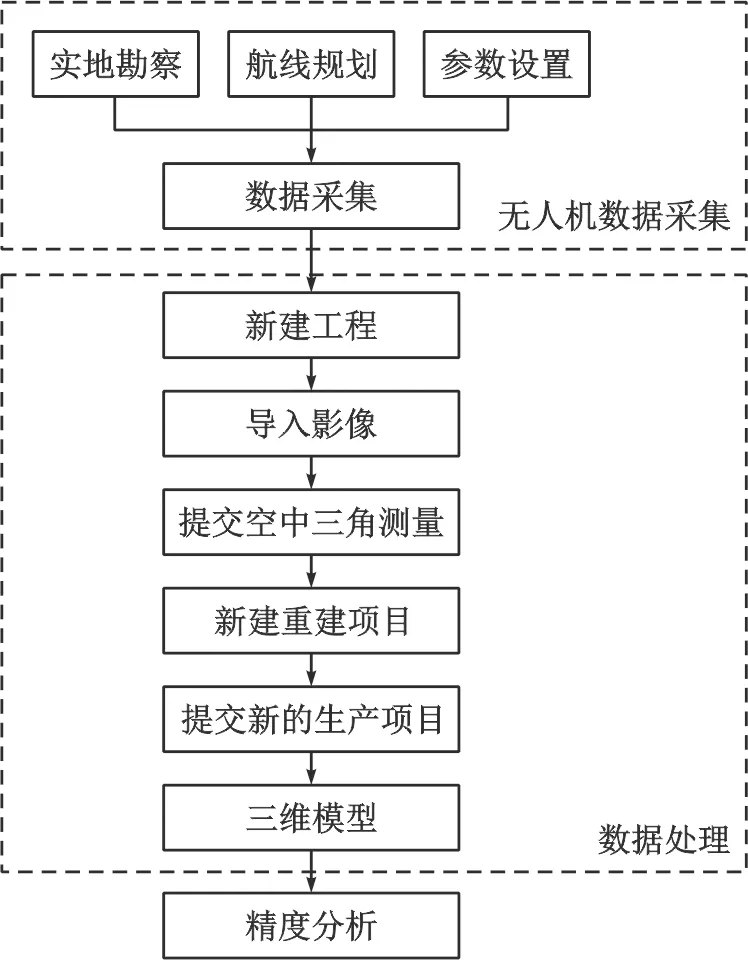
图4 技术路线
3.2 模型精度分析
(1)点位精度对比分析
三维模型的精度验证主要包括3个方面,分别是平面精度、高程精度、以及特定边长的精度评定[11]。其中,针对平面精度和高程精度点位精度分析所用到的计算公式如以下:
(1)
(2)
(3)
(4)
注:△x=X检-X模,△y=Y检-Y模,△h=Z检-Z模
X检,Y检,Z检:分别表示用GPS-RTK实测的控制点X,Y,Z坐标值。
X模,Y模,Z模:分别表示用清华山维EPS软件测得的控制点X,Y,Z坐标值。
n:表示控制点的个数。
首先,为了进行平面精度和高程精度分析,将GPS-RTK测得的野外检查点坐标当作检查真值,基于清华山维EPS软件平台,分别获取不同飞行方案所对应的3个模型上的8个检查点的坐标信息[12]。计算不同飞行方案中检查点坐标与对应真值坐标的差值如表3所示,据此进行中误差精度评定。
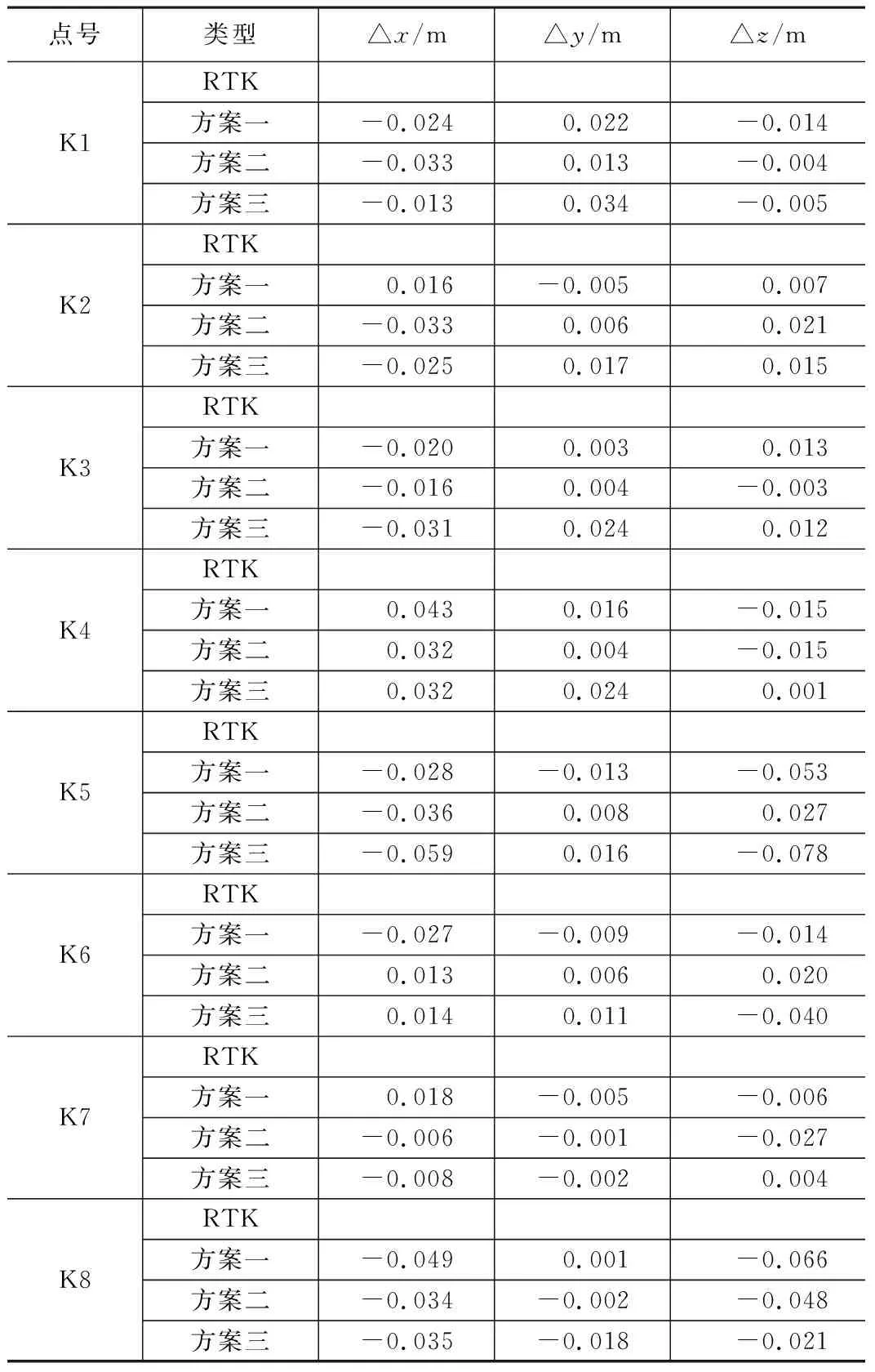
不同方案下的检查点坐标差统计 表3
再根据计算平面中误差和高程中误差对三维模型的精度进行综合分析。不同方案获得模型的坐标值以及GPS-RTK获取的坐标信息。
根据公式计算得到不同方案下的点位误差如表4所列。其中利用方案一飞行方案重建三维模型与实际RTK测得的数据计算出来Mx为:0.030 3 m;My为:0.011 6 m;Ms为:0.032 5 m;Mh为:0.031 7 m。利用方案二飞行方案重建三维模型与实际RTK测得的数据计算出来Mx为:0.027 5 m;My为:0.006 6 m;Ms为:0.028 3 m;Mh为:0.026 1 m。利用方案三飞行方案重建三维模型与实际RTK测得的数据计算出来Mx为:0.031 0 m;My为:0.020 2 m;Ms为:0.037 1 m;Mh为:0.032 7 m;具体得平面精度及高程精度如表4所示。

不同方案下的点位中误差 表4
根据表5的数据分析得到各方案的平面精度差异不大,高程精度较高,在x方向和y方向上方案二得到的三维模型精度最高;即平面精度最高的是方案二重建得到的模型。高程精度由方案二得到的三维模型精度最高,为 0.026 1 m。
(2)特定边长精度分析
首先在外业选取了3条雕塑上代表性的边,第一条边特定边a1是雕塑底座的高度,第二条特定边a2是雕塑正面的一条棱线,第三条是雕塑侧面的棱线,量测其特定边的长度作为真实值,具体测的特定边如图5所示。将实测的数据和清华山维EPS软件里量测三维模型的特定边进行对比分析。方案一重建得到的三维模型中量测的特定边为:a1的长度为 1.027 m;a2的长度为 2.317 m;a3的长度为 2.565 m。方案二得到的三维模型中量测的特定边为:a1得长度为 1.029 m;a2的长度为 2.326 m;a3的长度为 2.596 m;方案三得到的三维模型中量测的特定边为:a1的长度为 1.024 m;a2的长度为 2.304 m;a3的长度为 2.548 m。具体的数据如表5所示。
根据表5的数据,我们可以得出特定边a1实测的数据与方案一、二、三重建的长度相差不大,其中精度最高的是方案二,差值为 7 mm;特定边a2的差值差异较大,方案一与实测边长的差值为 34 mm,方案二与实测边长的差值为 25 mm,方案三与实测边长的差值为 47 mm,通过比较可知对于特定边来说方案二的精度最高;特定边a3的值最接近实测数据的是方案二。通过三个特定边的比较,方案二重建的三维模型边长精度最高。
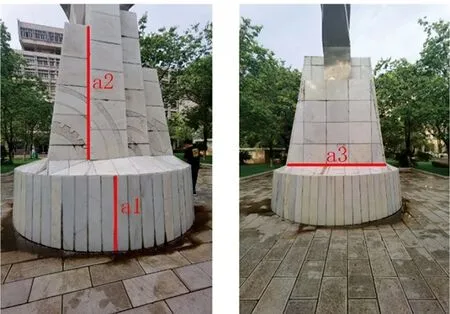
图5 实测特定边示意图

不同方案下的特定边长度 表5
(3)纹理特征定性分析
除了主要的平面精度、高程精度以及特定边长精度分析以外,本文还通过3个方案得到的最好视图进行定性的分析。方案一重建模型中纹理特征最清晰的是正视图,方案二的整体纹理特征较好,最好的视图是左视图,方案三最好的视图是俯视图,选出3个方案纹理最好的视图如图6所示,对重建三维模型的纹理进行定性的分析。

图6 三个方案的最好纹理比较图
3个设计方案所重建的模型中,方案一的正视图纹理最清晰,能够清楚地观察到正面雕塑的整体线条,雕塑体上的小环也能较好地观察到,雕塑中部的圆孔是两边相通的,也能观察得到近似圆孔的形状,雕塑中部的五花石纹理也较为清楚;对于方案二的左视图而言,雕塑上体部分以及雕塑的左侧纹理都较为清楚,表明方案二设计方案对侧面的信息表达效果较好;方案三的俯视图能够很好地观察到雕塑顶部的线条以及纹理,雕塑底座的圆柱体的俯视面也能很好地观察出来。
根据模型的纹理来看,此次设计的方案并不是很好,只有3个视图的纹理较为完整。如果需要更好的重建三维模型,可以使用五镜头的无人机进行井字型飞行;或者在周围环境允许的情况下,可以对复杂对象进行环绕飞行,这样重建三维模型效果会很好。
4 结论与展望
本文通过3个不同的飞行方案,利用免像控无人机(大疆精灵4RTK)采集影像数据,结合不同的飞行方案,从而在Context Capture软件中实现三维建模,对不同飞行方案下的三维模型控制点精度,雕塑模型特定边的长度作对比分析,得出以下结论:平面精度最高的为方案二,平面精度达到 0.028 3 m;高程精度最高的是方案二,高程精度达到 0.026 1 m;根据特定边精度的对比,精度最高的是方案一。通过对比三个方案的重建三维模型不同视角的纹理,得出方案一重建的三维模型的正视图纹理最清晰,方案二重建三维模型的左视图纹理最清晰,方案三重建三维模型的俯视图纹理最清晰;从而得到本次3个实验设计方案当中,方案二相对较好。证明了免像控无人机对复杂对象进行建模具有可行性,为复杂对象重建三维模型提供一定的参考。
同时本次实验存在一些不足之处:对于3个飞行方案,两个角度飞行的倾斜摄影测量,三维模型有一些死角,出现空洞现象;无人机采集的影像数据量小,相对较细的纹理不是很清楚;雕塑周围有较多的树木遮挡,不利于无人机的飞行,建模时雕塑周围出现较多的拉花现象。对于复杂对象进行建模时,由于周围环境的原因,没能进行环绕飞行,相对于周围空旷的复杂对象,我们可以使用环绕飞行的飞行方案来进行建模,复杂对象的三维模型精度和纹理都会更好。随着无人机倾斜摄影测量技术的不断发展,会有更适合复杂物体建模的飞行方案以及处理方案,需要我们进一步的学习和研究,更多地应用到不同的行业之中。
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
资源信息与工程(2021年5期)2022-01-15
铁道勘察(2021年6期)2021-12-27
全球定位系统(2021年1期)2021-03-26
当代陕西(2020年23期)2021-01-07
软件(2020年3期)2020-04-20
摄影之友(影像视觉)(2018年12期)2019-01-28
消费导刊(2017年8期)2018-01-18
北京航空航天大学学报(2017年4期)2017-11-23
Coco薇(2017年8期)2017-08-03