无人机倾斜摄影辅助三维激光扫描技术在厂房改造中的应用研究
2022-03-06 01:07杨红军郭威孙进冬韩鲍胜
城市勘测 2022年1期
杨红军,郭威,孙进冬,韩鲍胜
(1.江苏省地质测绘院,江苏 南京 211102; 2.江苏省地质矿产调查研究所,江苏 南京 210049)
1 引 言
对老旧厂房进行改造设计首先应对其现有状况进行准确测绘,三维激光扫描技术因具有扫描速度快、扫描细节表现好、数据采集精度高等优势[1],成为厂房改造设计的主要测绘方法。在大范围厂房测绘实践中,厂区内经常有扫描人员难以到达的隐蔽区域,单纯采用站式扫描测量方法难以获得建筑完整点云数据[2]。为快速获取厂房外立面三维坐标和纹理信息作为站式扫描的补充,本次实验引入轻量级无人机对厂区开展倾斜摄影测量,通过无人机良好的视场角来解决站式扫描仪获取点云数据缺漏的技术难题[3]。
2 研究背景与技术流程
2.1 研究背景
实验区为某老旧纺织厂,厂房占地面积约 15 000 m2,地势平坦。厂区建筑以一层框架结构为主,部分职工宿舍为二层房屋。整个纺织厂建筑密集,建筑间有围墙阻隔、房屋窗户多被封堵,扫描视野狭隘、通视困难。测区影像如图1所示。

图1 测区影像图
2.2 技术流程
以无人机倾斜摄影、三维激光扫描为代表的测绘新技术近年得到较快发展,使测绘方式及应用领域有了较大提升[4]。实验通过站式扫描仪对厂房内部开展三维扫描的同时,使用无人机倾斜摄影对地面视角难以获取的厂房顶盖,厂区外立面等区域进行补充采集,最终将两者获取的点云数据进行融合[5],获得厂区完整的三维位置信息与纹理影像数据,用于绘制立面图、轴网图、平面图、顶视图、剖面图等图件资料[2],技术流程如图2所示。
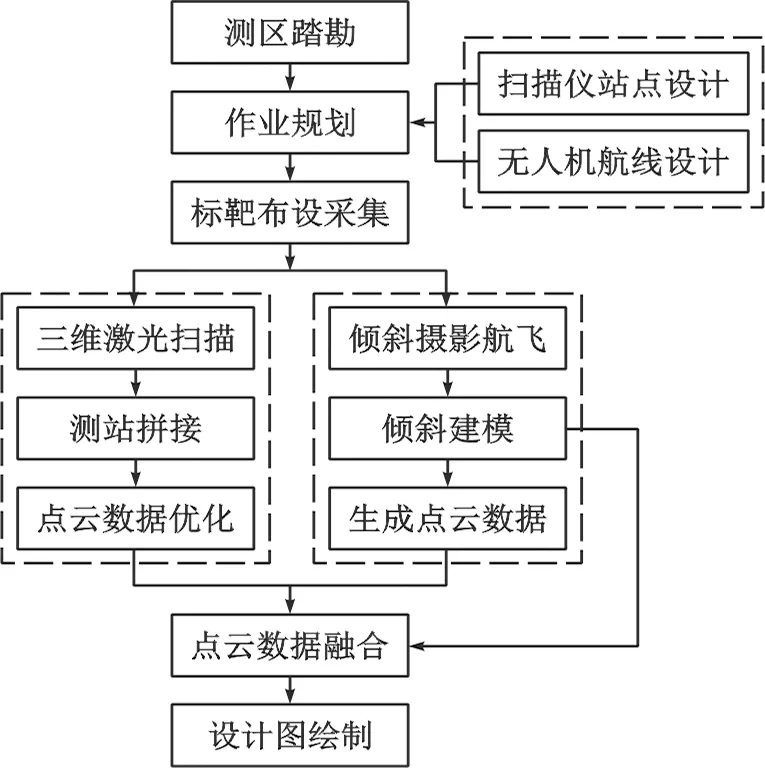
图2 技术流程图
3 基本原理及技术指标
3.1 三维激光扫描
三维激光扫描技术是测绘领域继GPS之后又一次技术革命[1],他突破了传统的单点测量技术,利用激光脉冲对目标物体进行扫描,可以大面积、大密度、快速度、高精度地获取地物的三维位置信息[6]。近年来,站式扫描测量系统,机载和车载激光雷达系统正逐渐广泛地应用于测绘生产研究的各个领域[7]。本次实验需要扫描的对象主要分布在厂房内部,工作环境狭小,GNSS信号遮挡严重,移动扫描测量方式难以开展。站式扫描无须GNSS信号,人工搬站灵活方便[6],并可通过公共点云拼接技术实现在巷道中或楼梯上的坐标传递,将不同的站点坐标纳入统一的独立坐标体系,其坐标转换过程通常利用布尔莎7参数模型[8]。
(1)
式中,3个平移参数[△X△Y△Z]T,3个旋转参数[εXεYεZ]T和1个尺度参数m。
本次实验选用带有视觉追踪自动拼接功能的新型站式扫描仪,其扫描范围为 0.5 m~130 m,扫描速率200万点/秒,标称点位精度在 20 m距离内为 2.9 mm。实验中相邻两设站点距离不大于 20 m,通过坐标转换拼接后残差不大于 3 mm。
3.2 无人机倾斜摄影
倾斜摄影技术在摄影方式上区别于传统的垂直航空摄影,突破了正射影像只能从垂直角度拍摄的约束[9],通过无人机平台挂载的倾斜相机,从不同的倾斜角度采集影像,模拟出符合视觉感受的真实立体世界[1]。目前主流的倾斜摄影相机分为五镜头和单镜头两类[5],其中单镜头相机质量轻便,能集成在轻量型无人机上,操控简便、成本低廉[2]。本次实验选用相机主距为 8.8 mm,像元尺寸为 2.412 um的某轻量型无人机对厂区开展倾斜摄影。为获得清晰度较好,分辨率较高的倾斜模型,需要在航飞前进行航线设计,数码航空摄影的地面分辨率取决于飞行高度,其值可按下式计算。
(2)
式中,h为相对航高;f为镜头焦距;a为像元尺寸;GSD为地面分辨率。
由上式计算可知,本次实验为确保厂区地面分辨率优于 1.5 cm,无人机航线设计阶段所确定的相对航高应不大于 55 m。
4 实验过程
4.1 坐标系统匹配
地面三维激光扫描获取的点云数据可通过公共点云拼接成一个独立坐标系,无人机倾斜摄影可通过连接CORS基站直接获取每张照片准确的POS信息。为将两者获取的成果纳入一个坐标系中首先应布设控制标靶[10]。实验布设7个直径为 18 cm的黑白相间圆形纸质标靶(图3为标靶样式、图4为扫描点云识别的标靶、图5为倾斜模型识别的标靶),并使用JSCORS采集其三维坐标,每个标靶采集三次取平均值为最终成果用于站式扫描点云纠正的起算数据。

图3 标靶样式 图4 点云标靶 图5 倾斜模型标靶
控制标靶应均匀布设在测区范围内如图6所示,对GNSS信号较差的厂房间狭小区域布设的标靶点,使用JSCORS直接采集有困难时也可以通过倾斜摄影间接获取的标靶点坐标用于地面三维激光点云纠正,最终实现站式扫描与倾斜摄影坐标系统匹配[11]。

图6 试验区控制标靶分布图
4.2 站式扫描数据采集与处理
站式扫描仪在厂房点云采集时先布设扫描站点位置,设站时综合考虑标靶识别的点云密度,且测站间距离不宜超过 20 m。扫描厂房内部应走“之”字形路线,使扫描视角多元化,能从更多角度获取点云数据,减少点云遮挡[12];通过楼梯向楼上传递坐标时,应在每个楼梯平台架设站点,增加扫描公共点云的重叠度;在进出厂房大门或从窗户传递坐标时应增加扫描站点密度,以增加拼接强度[13];点云扫描迁站过程应控制在三分钟内,避免拖延时间久,导致扫描仪的视觉追踪能力下降,降低后期自动拼接成功的可能。实验中扫描站点平面分布如图7所示,三维分布如图8所示。

图7 站点平面分布图

图8 站点三维分布图
外业扫描结束后将扫描的点云数据直接通过U盘拷贝到计算机,此时点云数据为各个独立测站坐标系。测站拼接以第一个测站坐标系为基准,通过自动拼接功能确定测站位置关系。对于没能实现自动拼接的测站需手动摆放位置进行拼接。拼接原理为通过公共点云数据获取同名点坐标来计算坐标转换参数和残差,并利用转换模型实现点云拼接[14]。点云拼接时,测站间拼接的链接应尽量形成闭合环,通过对测站间链接的闭合情况检查来确保拼接正确,避免计算机程序算法对公共点云的误判[4]。拼接前点云如图9所示、拼接后点云如图10所示、点云配准计算如图11所示。
扫描的老旧厂区共架设208个测站,通过内业测站拼接建立的213个链接将所有点云数据纳入统一坐标系中。拼接完成后,还需对所有点云进行一次优化计算,以提高整体点云拼接强度。为将实验区地面点云数据与无人机倾斜摄影成果纳入统一坐标系,还需通过控制标靶对整体点云进行坐标转换计算。计算时将整个点云视为一个刚体,纠正后点云上标靶点坐标与外业直接采集标靶点坐标较差如表1所示。

图9 拼接前点云图

图10 拼接后点云图
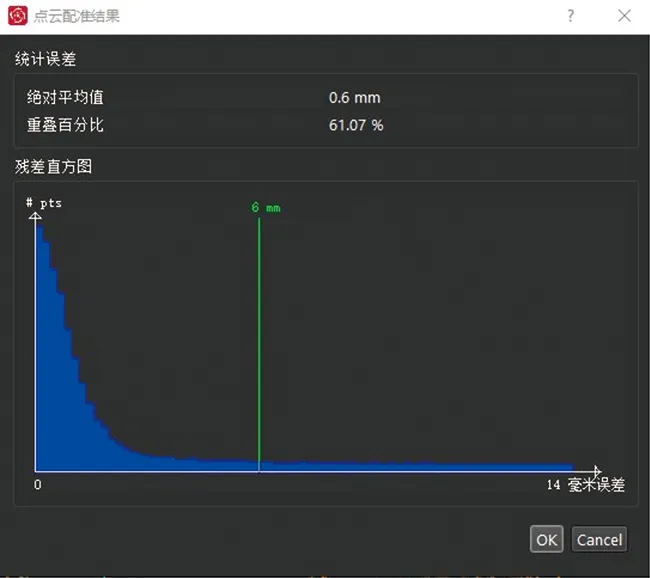
图11 点云配准结果图
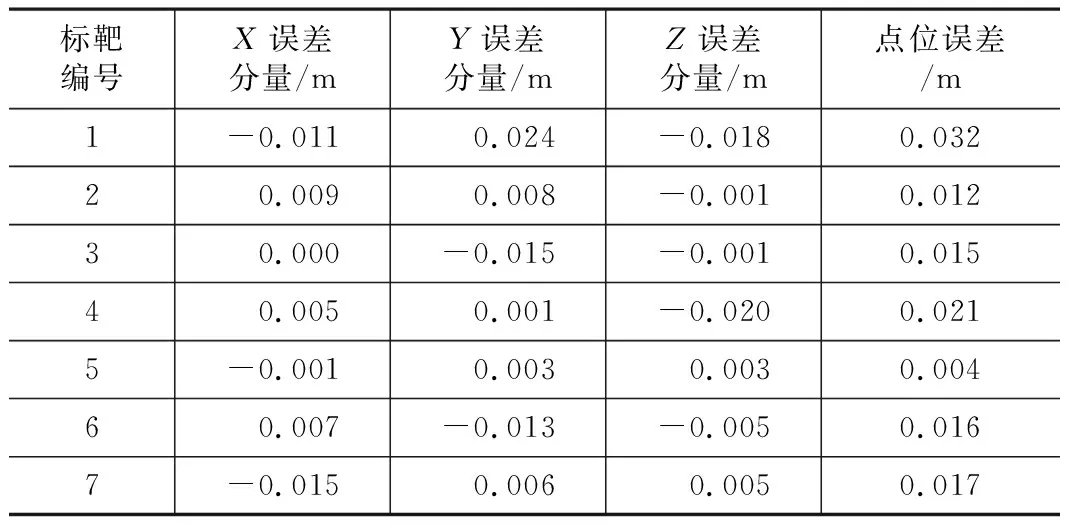
点云标靶残差表 表1
表1显示,标靶残差最大为 0.032 m,说明整体点云拼接正确,坐标配准准确无误。然后将纠正后的点云导出为las格式数据,用于导入测图软件绘制各种设计图件。
4.3 无人机倾斜摄影
无人机倾斜摄影航飞前进行实地踏勘,了解测区周边是否有影响飞行安全的高大建筑。通过综合航飞安全和分辨率需求,本次实验相对航高设为 50 m,航向重叠度和旁向重叠度均为80%,云台角度为-60°;采用井字航线自主飞行,共获取 1 700余张照片,地面分辨率约 1.4 cm;在布设标靶位置降低航高,补充手控拍照以获取清晰标靶照片。为从倾斜摄影模型中获取较高密度的点云数据,内业建模采用ContextCapture软件进行[1]。建模前从倾斜摄影照片中获取相机像主点位置(x0,y0),相机畸变参数(k1,k2,k3,p1,p2),每张照片准确的POS信息,综合相机主距(f),像元尺寸(a)等数据可实现免相控建模,模型重建结果需勾选倾斜模型osgb格式和点云las格式两种[15]。在获取的倾斜模型上量取7个标靶点坐标与外业直接采集的标靶点进行比较,其差值如表2所示。

倾斜模型标靶残差表 表2
表2显示,倾斜模型标靶残差最大为 0.053 m,说明免相控建模结果正确,站式扫描仪获取的点云数据与倾斜摄影获取的倾斜模型数据坐标一致。为提高两种方式获取点云数据的匹配程度,还可以在ContextCapture软件中对无人机获取的标靶照片进行刺点,通过相控点提高倾斜模型的精度[5]。
4.4 点云融合及图件绘制
立面图绘制过程中,经常会因点云遮挡、扫描不全导致判读不准,难以对整个建筑架构有全面把握。单纯采用地面三维激光扫描获取的点云数据(如图12所示)缺失严重[3],尤其是房顶和人员无法到达的隐蔽区域。此时通过叠加无人机视角的倾斜模型点云数据(如图13所示)可有效提高点云的完整性,让各种图件绘制容易判读、尺寸更准确。

图12 站式扫描点云图

图13 叠加倾斜模型点云图
图12、图13对比可明显看出,站式扫描仪仅能获取房屋顶盖的内壁,无法获得顶盖上方的点云数据。且因围墙阻隔,人员无法进入的隐蔽区域,站式扫描仪获取的点云数据表现为黑色空洞。而无人机倾斜摄影依赖拍照平台良好的视场角可获得完整顶盖点云,对于隐蔽区域也能获取部分点云数据[5]。
基于上述两种方法获取的点云数据统一转化为las格式,共同加载到测图软件中即可实现点云数据基于统一坐标系的数据融合。立面图绘制时应首先将点云进行切片(如图14所示),后参照点云位置尺寸进行立面图绘制(如图15所示)。为保持不同图件中相同部件尺寸无较大误差,可首先绘制平面图,在平面图上绘制出窗户门框等部件;后切换至立面测图,保留平面图上的部件,绘制立面时参考平面图相关尺寸[10]。

图14 点云立面切片图
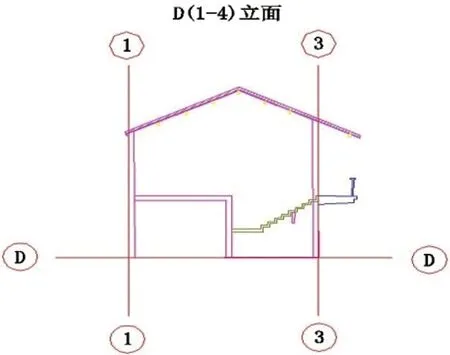
图15 立面图
5 结 语
(1)在老旧厂房改造项目中采用站式扫描仪对厂房内外开展扫描能获得房屋墩柱、横梁、门窗等建筑细节点云数据,同时受站式扫描仪站点位置限制,屋顶和人员无法到达的隐蔽区域点云缺失,通过使用轻量型无人机快速获取扫描区域倾斜模型及点云数据可作为绘图建模的有益补充。
(2)通过布设与测量控制标靶可实现地面扫描点云数据与无人机倾斜摄影点云数据基于统一坐标系的数据融合。融合后的点云数据更加完整,设计图件绘制时对点云的判读更直观、尺寸更准确。
(3)站式扫描仪在基于公共点云拼接时,测站间拼接的链接应尽量形成闭合环,通过对测站间链接的闭合情况检查来确保拼接正确,避免计算机程序算法对公共点云的误判。
猜你喜欢
铁路技术创新(2022年3期)2022-10-27
现代仪器与医疗(2022年2期)2022-08-11
测绘地理信息(2022年2期)2022-04-02
文萃报·周五版(2021年45期)2021-11-17
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31
模具制造(2019年3期)2019-06-06
世界博览(2015年20期)2015-09-10
现代营销·经营版(2015年3期)2015-04-20
大地测量与地球动力学(2014年3期)2014-02-13