
基于自适应按需辅助的上肢镜像控制策略
2022-03-09 01:51李会军胡珊珊宋爱国
电子与信息学报 2022年2期
李会军 胡珊珊 宋爱国
(东南大学仪器科学与工程学院 南京 210096)
1 引言
偏瘫是一种中枢神经损伤疾病,多发生于脑卒中患者,常见症状为肢体一侧运动功能障碍和肢体疼痛等[1]。传统治疗偏瘫的方法为治疗师与患者一对一进行辅助康复训练,由于患者与治疗师数量的不平衡以及治疗费用过于昂贵,该方法具有一定局限性。康复机器人的出现解决了上述局限性,康复机器人可以在无治疗师的情况下辅助患者进行康复训练,同时可以通过采集各项数据合理评估患者的康复状态,以便更好地优化治疗方案,具有广阔的应用前景和发展空间。
基于康复机器人系统有多种康复疗法,主要有被动疗法、主动疗法、镜像疗法等。其中镜像疗法(Mirror Therapy, MT)是一种基于镜像对称原理的康复疗法,通常为偏瘫患者左右两侧肢体做相互对称的训练动作,通过镜像视错觉反馈刺激大脑相应区域产生痛觉和运动感,以促进偏瘫患者运动功能的重建和恢复[2,3]。镜像疗法在偏瘫患者的临床康复上应用广泛[4-6]。Wang等人[7]提出一种基于惯性测量单元(Inertial Measurement Unit, IMU)测量系统的外骨骼上肢机器人镜像治疗方法,使用IMU检测健肢运动轨迹,患侧同步健侧轨迹,有效提升了康复训练效果;Shahbazi等人[8]提出一种由治疗师根据患者康复情况制定训练方案的镜像训练方法,可以适应不同康复周期的患者;瞿畅等人[9]研制了一种体感控制的镜像康复机器人系统,使用Kinect采集健肢体态动作来控制患肢进行同步镜像运动,具有良好的控制性能。上述镜像训练方法通过机器人辅助患肢,实现患肢对健肢的镜像跟随运动,具有一定的康复疗效,然而这些方法对于患肢来说均为简单的被动康复训练,没有考虑患肢的主动性能。
研究表明偏瘫患者的主动性是影响其康复效果的关键因素之一[10,11]。Hogan等人[10]认为治疗形式比治疗强度更重要,患者的主动参与相比被动训练更能提升康复效果;Warraich等人[11]认为患者的主动参与可以促进治疗过程中神经可塑性和运动恢复。同时,考虑到偏瘫患者在运动过程中的舒适性和安全性,康复训练系统的抗干扰性也成为影响其康复训练效果的关键因素之一[12-14]。因此研究一种可以提升患者主动与系统抗干扰性的控制策略十分必要。
阻抗控制策略通过调节力与位置之间的动态关系来控制机器人,是一种常用的机器人控制策略[15],但传统阻抗控制在康复机器人领域仅适用于被动模式,不利于提升患者训练的主动性。按需辅助控制策略的主要思想是系统根据患者的实时需求提供尽量小的辅助力以帮助其完成康复训练任务,使得系统提供的辅助力矩达到最小值,患者提供的主动力矩达到最大值[16],从而提升患者的主动性以促进其康复效果。
因此本文提出一种基于自适应按需辅助的镜像控制策略,将按需辅助控制策略应用于镜像康复训练系统,根据患肢运动状态实时调整补偿患肢运动所需辅助力,充分考虑了镜像训练中患肢的主动性能,在保证患肢镜像跟随精度的同时可以提升患者的主动性和系统的抗干扰性。设计了两项对比实验,对比本文方法与传统阻抗控制方法控制性能的差异性,通过分析两种方法的辅助力大小和镜像跟随误差,验证本文方法提升患者主动性和系统抗干扰性的效果。
2 自适应按需辅助镜像控制策略
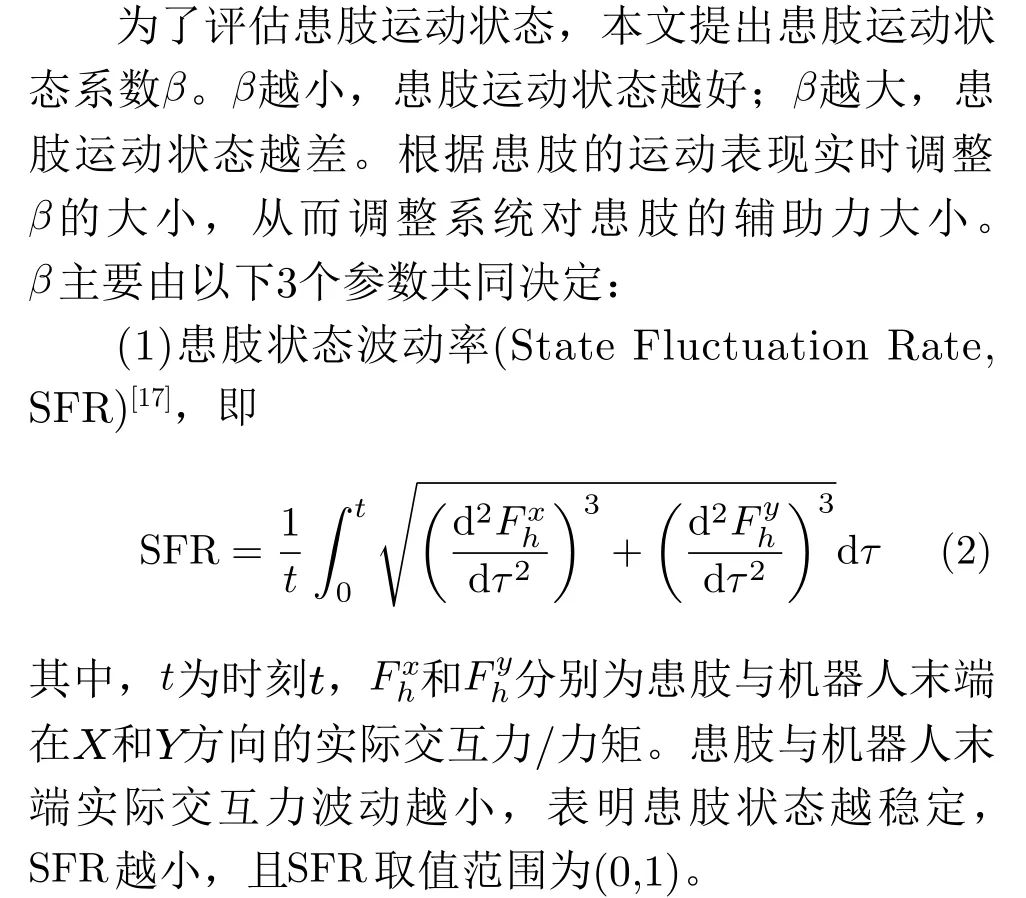
本文提出一种自适应按需辅助镜像控制策略,如图1所示,该策略主要包括镜像控制和按需辅助控制两个模块。镜像控制模块通过视觉定位识别采集患者健侧与患侧手位置,基于镜像对称原理,由患者健侧手位置计算患侧手期望位置,得到患侧手的运动偏差;按需辅助模块为一种基于运动状态评估的阻抗控制算法,运动状态评估参数包括:患肢状态波动率(State Fluctuation Rate, SFR)、患肢力矩偏移率(Torque Offset Rate, TOR)和机器人辅助率(Robot Assistance Rate, RAR)3个参数;机器人根据患肢运动状态实时调节辅助力。
2.1 镜像控制模块
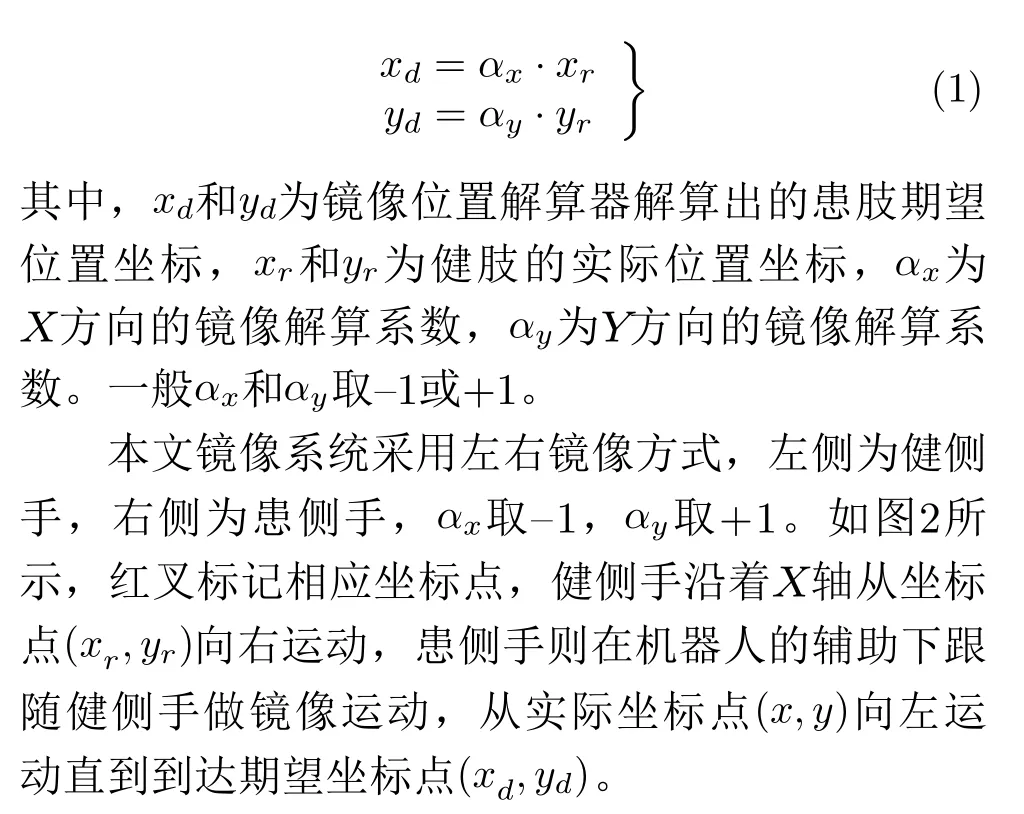
镜像控制模块采用视觉定位方法分别识别患肢和健肢的位置,再通过镜像位置解算器解算出患肢的期望位置,最后输出患肢实际位置与期望位置的偏差。镜像位置解算器的原理为镜像对称原理,即
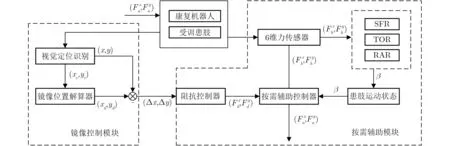
图1 自适应按需辅助镜像控制策略架构
2.2 按需辅助模块
按需辅助模块设计了一种患肢运动状态评估方法,根据一些参数来实时评估患肢的运动状态;基于传统阻抗控制得到期望辅助力,根据患肢运动状态自适应调节实际辅助力的大小。
2.2.1 运动状态评估方法
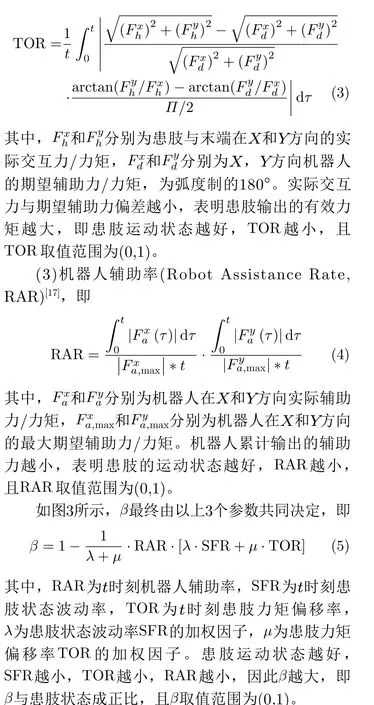
(2)患肢力矩偏移率(Torque Offset Rate,TOR),即
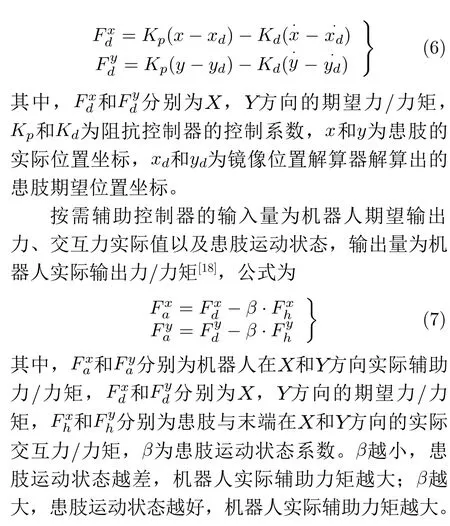
2.2.2 按需辅助控制方法
如图1所示,按需辅助模块的输入量为位置偏差,经过阻抗控制器解算为机器人的期望输出力/力矩,即
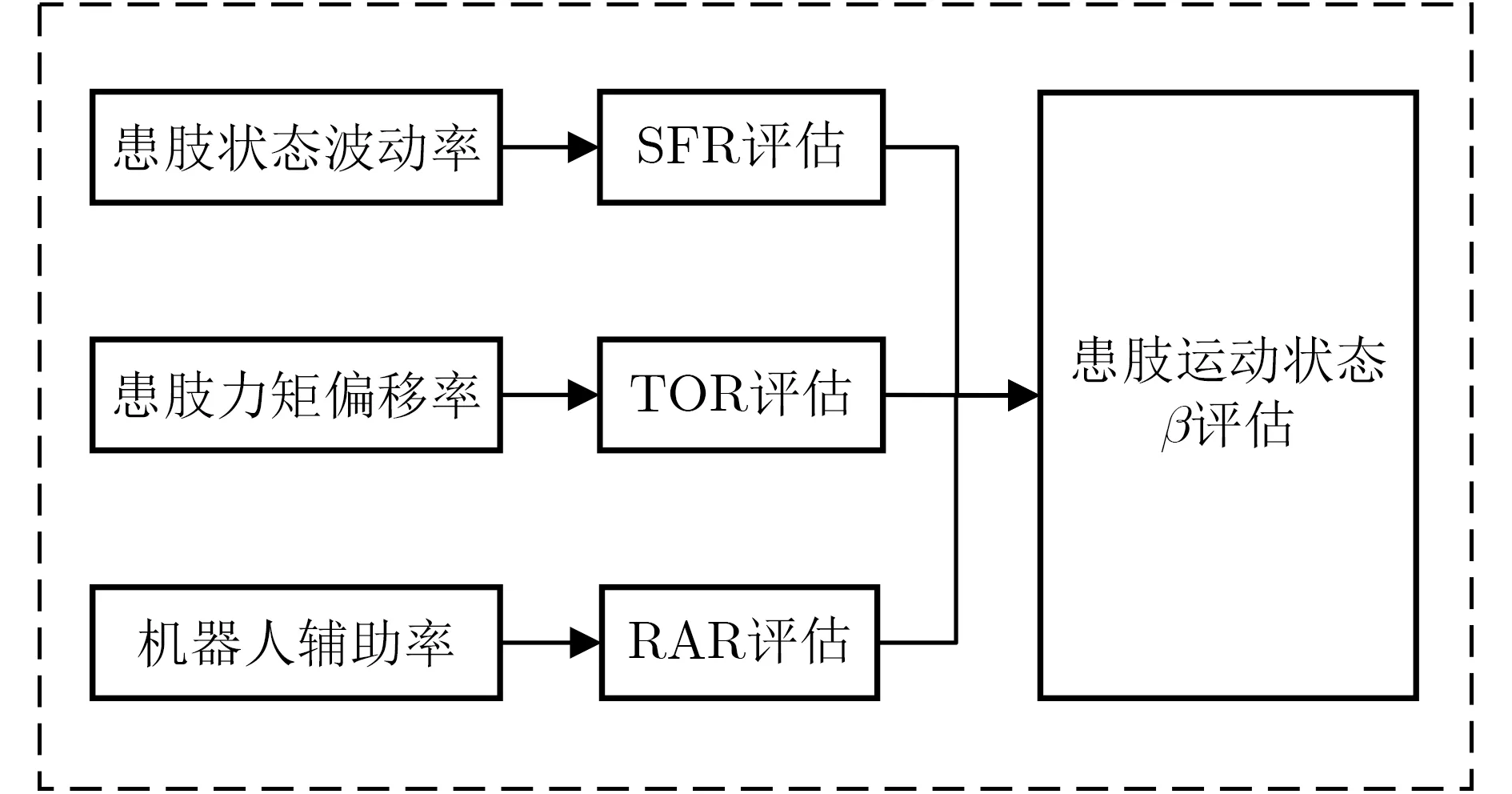
图3 运动状态评估框图
3 实验研究与分析
本文研究招募4名健康受试者,2男2女,身体健康状况良好,无心血管等疾病,年龄为24~26岁。实验于东南大学机器人传感与控制技术研究所进行,受试者均签署知情同意书。
3.1 实验系统
基于按需辅助的上肢镜像康复训练方法的实验交互系统包括机器人本体、视觉定位系统、控制箱、虚拟场景等部分。实验现场如图4所示,康复机器人采用并联连杆结构和串联菱形拉伸结构分别实现X和Y方向上的运动[19],共2个训练自由度,X和Y方向已标注于图中;摄像头安装在桌面上方,通过检测机器人末端和健侧握把上的Apriltags进行定位;机器人末端安装串联手臂托架结构,同时在手部的握把上安装有6维力传感器,实时测量康复训练末端与患肢的交互力。
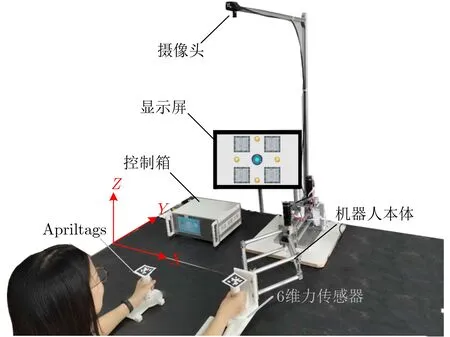
图4 实验现场
虚拟场景的搭建在Unity3D平台完成,主要目的是增加受试者训练时的乐趣和沉浸性[20,21]。本实验设计虚拟场景如图5所示,场景中的X和Y方向与实验现场桌面的X和Y方向保持对应关系。场景中主要物体有小球、宝石和障碍物,小球跟踪受训者患肢的运动情况,与患肢的位置坐标保持一致;宝石处设置碰撞检测,当小球与其发生碰撞时游戏得分增加;障碍物阻碍小球运动,使小球保持直线运动。游戏开始前可以手动设置游戏时长,当游戏时长为零时游戏停止,并显示游戏得分。
3.2 实验方案
为验证本文方法对于提升患者主动性和系统抗干扰性的效果,4名受试者参与本实验。实验过程中,受试者坐在桌子的前面,双手分别放置的左边的握把和右边的患侧手臂托架上面,4名受试者分为两组,分别模拟两种不同的康复状态。其中,受试者A和C(1男1女)模拟患肢不稳定状态,具体表现为:SFR>0.7,TOR>0.7;受试者B和D(1男1女)模拟患肢稳定状态,具体表现为:SFR<0.3,TOR<0.3;以上数值均表示每次实验过程中的平均值。
上肢在X方向的运动轨迹采用正弦轨迹,即X=sin(t),受试者保持此轨迹进行运动,运动范围为0~40cm,Y方向轨迹同X方向。本实验采用对比实验的方法,通过对比本文方法与传统方法性能的差异来验证本文方法对于患者主动性和系统抗干扰性的提升效果。其中,传统方法为阻抗控制,为单纯的被动训练模式,如式(8)-式(10)所示。实验中,传统方法和本文方法的如下参数取值保持相同:αx取-1,αy取1,Kp取-0.45,Kd取0.24。
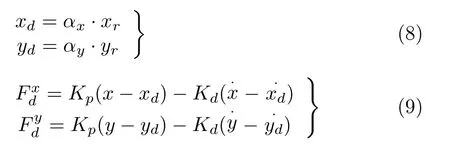
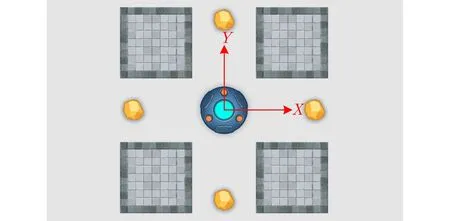
图5 虚拟场景

本实验共设计两组对比实验,实验1验证患者主动性提升效果,实验中分别记录两组受试者使用两种方法时机器人辅助力的大小,间接反映患肢的有效主动力矩大小,从而说明本文方法对于提升患者主动性的效果;同时记录两种方法的镜像跟随误差,反映两种方法的位置精度。实验2验证系统抗干扰性,受试者B和D分别进行实验,在X方向进行平稳运动,第1.3 s左右时给设备末端施加一个10N左右的干扰外力保持1 s,记录系统的各项参数变化以及辅助力和跟随误差,分析本文方法的抗干扰性。
为减少偶然因素对实验结果的影响,要求受试者在参与实验之前进行大量模拟训练,熟悉其所模拟患肢状态,且每组实验重复6遍,最终取6次实验的平均值作为实验结果[22]。具体实验方案如表1所示。
3.3 实验结果
3.3.1 患肢主动性实验结果
实验1患肢主动性验证实验结果如图6和表2所示,图表中的数据均为6次实验的平均值:
(1)SFR>0.7,TOR>0.7的受试者A和C进行上肢镜像康复训练的实验结果如图6(a)、图6(c)和表2所示。分析图表可知,当受试者患肢状态不稳定时,各项状态参数值偏大;此时传统方法机器人的平均辅助力为7.8N,本文方法机器人的平均辅助力为4.9N;同时传统方法的平均镜像跟随误差为44.3 mm,本文方法的平均镜像跟随误差为27.5 mm。相比传统方法,本文方法在患肢状态不稳定时明显降低了辅助力,同时又减小了跟随误差。
(2)SFR<0.3,TOR<0.3的受试者B和D进行上肢镜像康复训练的实验结果如图6(b)、图6(d)和表2所示。分析图表可知,当受试者患肢状态稳定时,各项状态参数值偏小;此时传统方法机器人的平均辅助力为6.4N,本文方法机器人的平均辅助力为1.5N;同时传统方法的平均镜像跟随误差为28.8 mm,本文方法的平均镜像跟随误差为17.4 mm。相比传统方法,本文方法在患肢状态稳定时辅助力很小,同时又减小了跟随误差。
结合以上两种情况,由表2可知,本文方法相比传统方法在患肢稳定和不稳定这两种状态下的辅助力平均降低了56.9%,说明患肢的有效主动力矩大大增加;传统方法平均位置精度为9.1%,本文方法平均位置精度为5.6%,相比传统方法减小了镜像跟随误差,提升了镜像跟随精度。
3.3.2 系统抗干扰性实验结果
实验2系统抗干扰性验证实验结果如图7和表3所示,图表中的数据均为6次实验的平均值:
分析图表可知,当系统受到10N持续1s的外力干扰时,传统方法的辅助力几乎保持不变,本文方法的平均辅助力由原先的1.2N变为-8.9N,补偿了89%的干扰外力;在这1s内传统方法的平均镜像跟随误差由原先的28.5 mm增大到40.3 mm,增加了39.9%;本文方法的平均镜像跟随误差由原先的17.4 mm变为18.6 mm,增长率仅为6.5%;由图7可知,在第1.3 s系统突然受到10N的外力干扰时,各项状态参数的平均值由原先的<0.3变为>0.6,但第1.5 s开始各项状态参数开始下降,直至最终趋于平稳<0.3的状态。
综上所述,当系统受到外力干扰时,传统方法没有自适应调节功能,镜像跟随误差大幅增长,而本文方法辅助力可以自适应补偿89%的外力干扰,使得镜像跟随误差一直保持在一个平稳较低的水平,提升了系统的抗干扰性。
4 结论
本文研究的基于按需辅助的上肢镜像康复训练控制策略,基于传统阻抗控制增加了自适应按需辅助模块,根据患肢的运动状态自适应地调节机器人对患肢的辅助力大小,实现患肢对健肢的镜像运动跟随。通过两组对比实验分析得知,本文方法相比传统方法提供的平均辅助力降低了56.9%,增加了患肢主动力矩的利用率,提升了患肢的主动性;本文方法平均位置精度为5.6%,相比传统方法减小了镜像跟随误差,提升了镜像跟随精度;当系统受到外力干扰时,本文方法辅助力可以自适应补偿89%的干扰外力,镜像跟随误差仅提高了6.5%,大大降低了干扰外力对患肢的伤害同时保证了镜像跟随精度,有效提升了系统的抗干扰性。因此本文方法对于镜像康复训练系统有效提升了患肢主动性以及系统抗干扰性,满足镜像康复训练的要求。

表1 实验方案
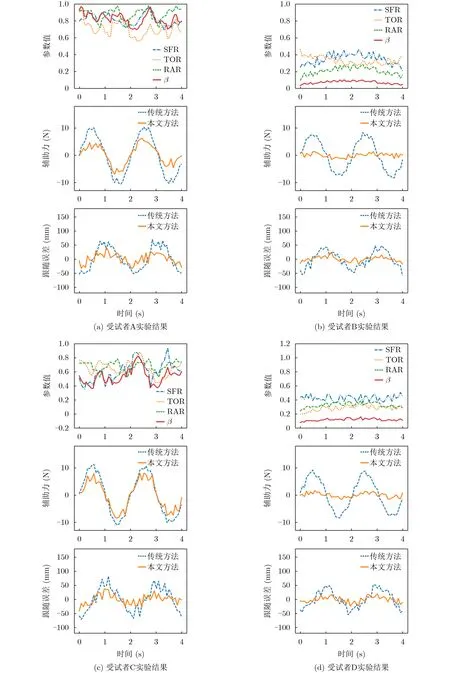
图6 患肢主动性验证实验结果

表2 患肢主动性验证实验结果
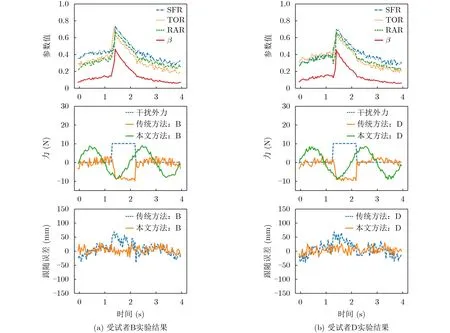
图7 系统抗干扰性验证实验结果

表3 系统抗干扰性验证实验结果
猜你喜欢
中华骨与关节外科杂志(2022年1期)2022-08-31
实用临床护理学杂志(电子版)(2020年48期)2020-11-19
当代党员(2020年20期)2020-11-06
浙江临床医学(2020年9期)2020-10-10
World Journal of Clinical Cases(2020年7期)2020-04-23
小康(2018年23期)2018-08-23
祖国(2016年20期)2016-12-12
小康(2015年4期)2015-03-31
