
空间滚珠直线导轨阻力测试设备研制与试验研究
2022-03-17 07:24李德伦王兆阳邵英奇
南京航空航天大学学报 2022年1期
李德伦,杨 旭,张 英,张 运,王兆阳,邵英奇
(1.空间智能机器人系统技术与应用北京市重点实验室,北京空间飞行器总体设计部,北京 100094;2.北京邮电大学现代邮政学院,北京 100876;3.陆军装甲兵学院,北京 100071)
随着航天技术的发展,深空探测领域中常用的采样机构、载人登月领域中的着陆缓冲机构、在轨服务中的执行机构和末端执行器等对直线运动副的需求越来越多。滚珠直线导轨是一种精密直线导向部件,具有导向精度高、定位精度高、运动平稳、承载能力大、摩擦力小等诸多优点[1],正在被越来越广泛地应用于空间各种传动机构中。在使用过程中,滚珠直线导轨往往与滚珠丝杠配合使用,用于导向并承受运动过程中的力和力矩。
滚珠直线导轨在运动过程中,滚珠在滑块沟道、返回器沟道和导轨沟道组成的半封闭空间中运动。一般情况下,滚动体绕自身轴线转动,同时又绕沟道滚动,在滚动的同时,滚动体沿沟道还伴随有一定的滑动,当接触角不等于零时,滚珠还存在绕接触面的法向滑动,即自旋滑动,高速运转时,滚珠还可能有因陀螺力矩而产生附加运动。此外,滚珠的运动还受到滚珠直线导轨的结构参数、工作条件、润滑状况以及制造精度等诸多因素的影响,因此,滚珠直线导轨中滚珠的运动和受力非常复杂[2⁃4]。Houpert、耿宝龙等建立了接触区压力的计算模型,通过分析差动滑动、弹性滞后对接触摩擦力的影响,获得了预加载荷与摩擦力的关系和滚柱直线导轨副运动摩擦力计算公式[5⁃7]。
空间应用中,滚珠直线导轨工作在无人环境下,运行阻力是判断其在轨运行状态的重要遥测参数。因此,测试并记录滚珠直线导轨在不同力矩载荷、不同速度、不同寿命阶段下的运行阻力,与在轨运行各阶段的滚动直线导轨在给定载荷下的运行阻力等遥测数据及其变化进行横向分析比对,即可对滚珠直线导轨的产品状态进行判断。因此,研究滚珠直线导轨在不同载荷下的运动阻力对于判断产品在轨运行状态、提早发现风险等具有极其重要的意义。
1 空间滚珠直线导轨
1.1 产品状态
文中测试的滚珠直线导轨型号为GGB20 AAL,为四点接触式结构,主要由滑块、返回器、导轨和钢球4 部分组成,其中,滑块长度L为40 mm,两侧沟道间距B为20 mm,高度H为30 mm,如图1 所示。
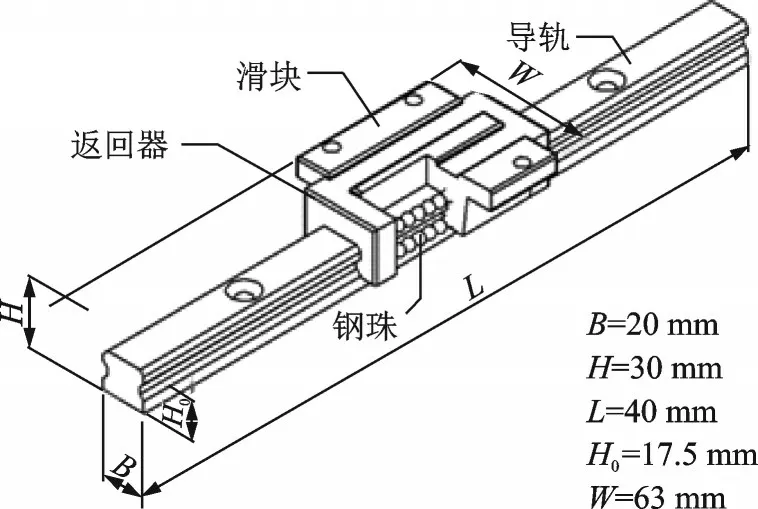
图1 滚珠直线导轨组成示意图Fig.1 Composition diagram of rolling linear guide
为了适应空间环境,避免冷焊现象,滚珠直线导轨采用了空间脂润滑的方式,在滑块沟道和导轨沟道等工作面上涂覆LW⁃2 润滑脂,起到减少摩擦力、确保运行平稳、提高运动寿命的作用。
1.2 坐标系定义
为了形象说明滚珠直线导轨的载荷,定义X方向力矩为倾覆力矩,Y方向力矩为扭转力矩、Z方向力矩为翻转力矩,如图2 所示。
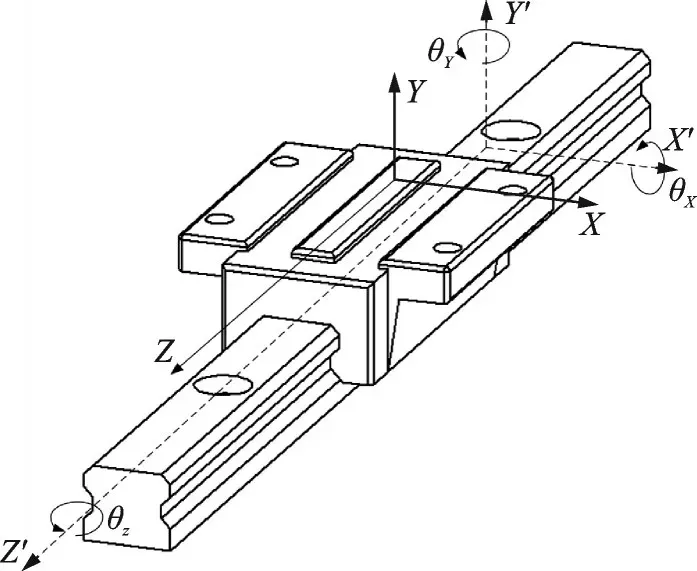
图2 滚珠直线导轨及其坐标系Fig.2 Rolling linear guide and it’s coordinate
1.3 受力分析
滚珠直线导轨工作过程中,滑块沟道、导轨沟道和滚动体表面为工作面,运动过程中,滑块受到的外加载荷会按照一定的规律分布到对应位置的滚珠上[8⁃13]。当滑块承受MX方向或MY方向的力矩载荷时,滚珠的法向载荷沿Z向分布如图3 所示;当滑块承受MZ方向的力矩载荷时,滚珠的受力及其在法向载荷沿Z向分布如图4所示。
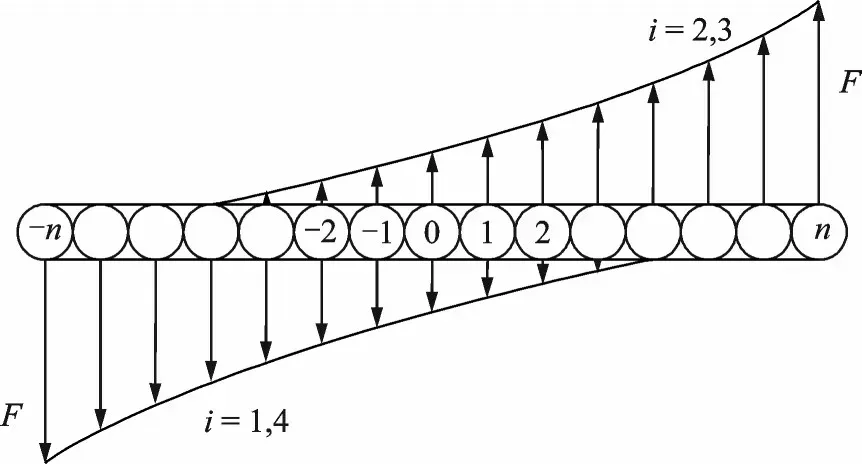
图3 力矩MX或MY作用下的滚动体载荷分布图Fig.3 Load distribution under bending moment MX or MY
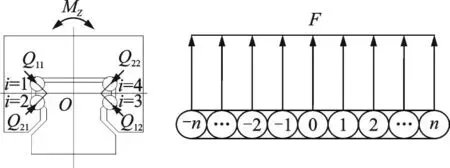
图4 力矩MZ作用下的滚动体载荷分布图Fig.4 Load distribution under bending moment MZ
2 阻力测试系统搭建
2.1 测试设备系统设计
滚珠直线导轨阻力测试设备主要由机械、控制和软件3 个子系统组成。其中,机械子系统是主体结构,用于滚珠直线导轨的固定和加载;控制子系统控制并驱动电机组件运动,推动滚珠直线导轨做直线往复运动;软件子系统主要用于完成各种参数设置、指令下发、数据/采集/处理/导出等[14],如图5 所示。

图5 滚珠直线导轨阻力测试设备组成与连接图Fig.5 Composition and connection diagram of resistance force test equipment for rolling linear guide
该套测试设备采用高强度铝型材搭建,具有成本低、传动链短、控制方法简单有效、加载方便、可实时监测载荷力矩变化等优点。
2.2 阻力测试原理
测试设备上共配置7 个力传感器,型号为大洋DY107,量程1~50 kg,精度0.01 N。传感器1 和2、3 和4 连接在扩展框架和机架之间,分别用于监测X方向、Y方向力矩。传感器5 和6 连接在扩展框架和动平台之间,用于监测Z方向力矩。传感器7 连接在扩展框架与动平台之间,用于测量滚动直线导轨的运行阻力。调整1 和2、3 和4、5 和6 处砝码的质量,力传感器7 的读数即为对应载荷下的运行阻力。砝码、力矩传感器的布置如图6 所示。
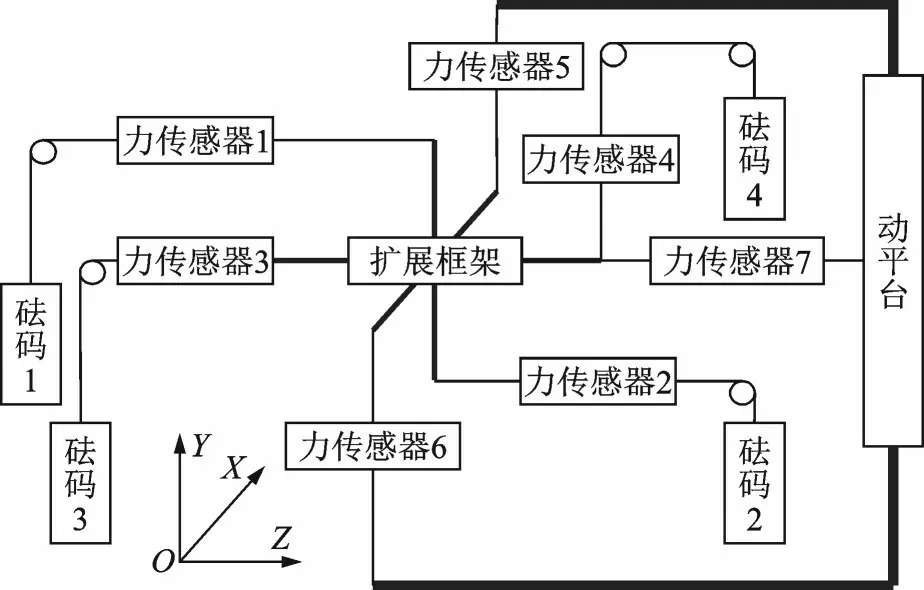
图6 加载方式与力传感器布置示意图Fig.6 Schematic diagram of loading and force sensor ar⁃rangement
2.3 机械子系统设计
机械子系统主要由机架、扩展框架、动平台、驱动电机和配重模块5 部分组成。被测导轨安装在机架上,滑块与扩展框架连接,动平台底部安装滚动轮,可以在机架上移动。X向加载装置和Y向加载装置安装在扩展框架和机架之间,通过砝码实现加载,Z向加载装置安装在扩展框架和动平台之间,通过张紧绳实现加载。X向和Y向加载测试时,驱动电机推动动平台和导轨滑块运动,Z向加载时,驱动电机推动动平台、导轨滑块和扩展框架运动。测试设备如图7 所示。
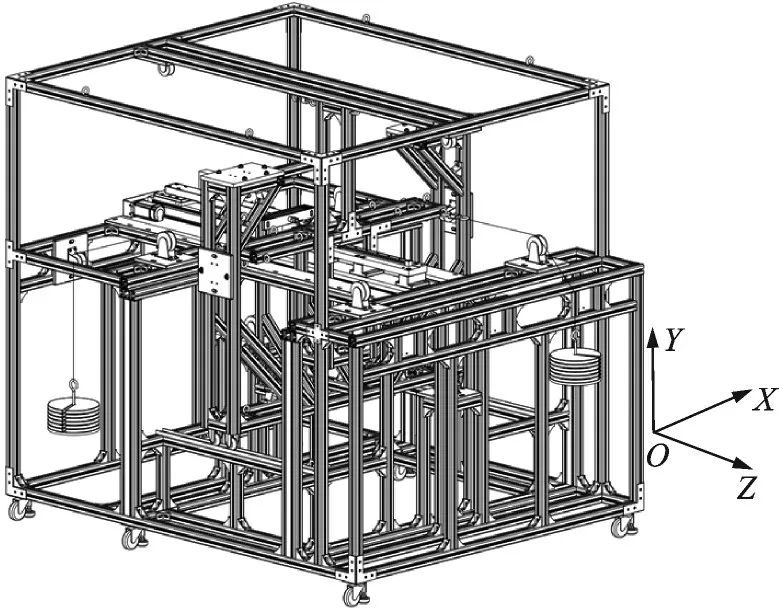
图7 滚珠直线导轨阻力测试设备Fig.7 Resistance force test equipment of rolling linear guide
2.4 控制子系统设计
控制子系统主要由上位机、驱动器、控制器和变送器等组成,用于完成伺服电机的速度/位置控制和力传感器数据的传输。伺服电机型号为MHMF012L1V2M,驱动器型号为MADLT05SF多功能型。伺服电机采用速度控制,上位机发送数字指令给单片机,单片机利用D/A 模块将数字信号转换成模拟信号(电压),并传递给驱动器,驱动器根据电压的大小进行电机的速度控制。上位机与驱动器通过USB 接口进行通讯,实现参数设定及状态监视等功能,与控制器采用UART 串口通讯,实现指令和数据的传输,与变送器通过485总线进行通信,并通过通道地址完成力传感器信号的快速采集。控制子系统的拓扑结构如图8所示。
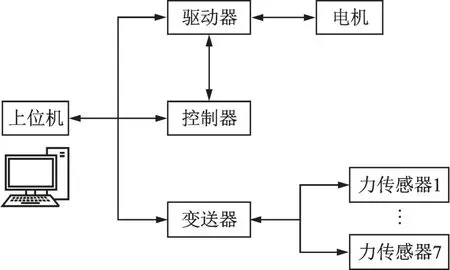
图8 滚珠直线导轨阻力测试设备控制系统拓扑结构Fig.8 Control system topology of rolling linear guide resis⁃tance force test equipment
伺服电机的闭环速度控制采用了传统的PI 控制技术,在控制回路中引入了积分项,将积分项作为反馈引入控制回路中,减小系统的稳态误差。
2.5 软件子系统设计
基于Qt Creator 进行了滚动直线导轨阻力测试设备软件子系统的开发,并利用C++完成了图形用户界面应用程序的开发。软件界面分成通讯设置与状态显示区、测试状态设置区、测试数据显示区和测试曲线区,可以设置通讯方式、速度补偿、力传感器补偿、运动方向、运动模式和测量周期等参数。通过软件界面可以监测通讯状态、运行阻力、滑块位置和滑块速度等重要数据,实时绘制滑块运动过程中的阻力曲线,并导出运动速度、运行阻力等重要数据至Excel 中。软件子系统的测试界面如图9 所示。
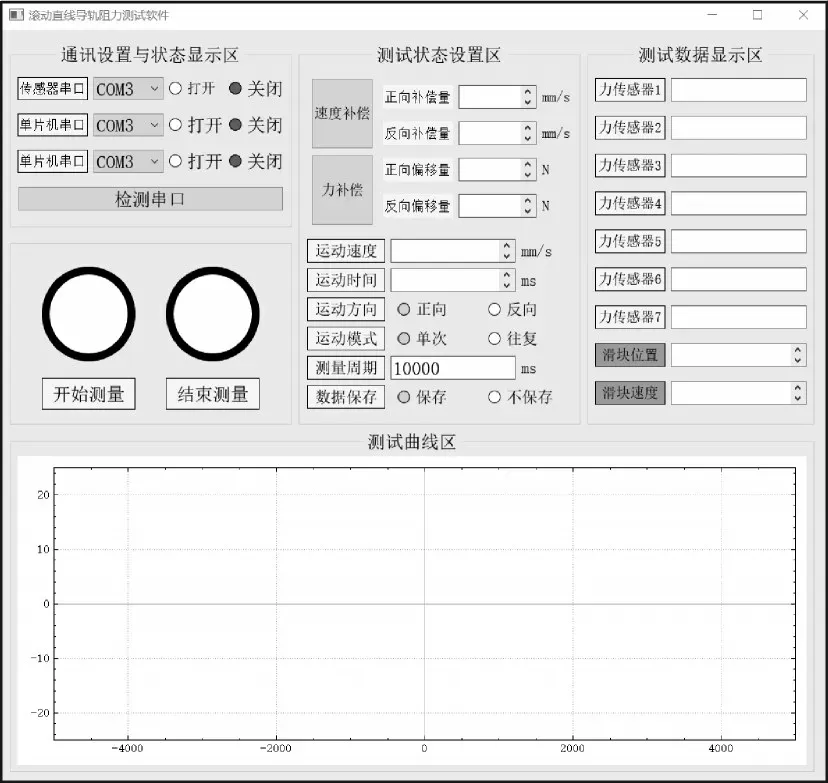
图9 滚珠直线导轨阻力测试设备软件界面Fig.9 Software interface of rolling linear guide resistance force test equipment
3 试验条件与测试流程
3.1 试验条件
(1)测试前,对滚珠直线导轨进行跑合,跑合过程中,滚珠直线导轨分别以5、10、15 和20 mm/s的速度往复运动10 次;
(2)单向加载测试时,滚珠直线导轨以10 mm/s 的速度往复运动10 次;
(3)单向加载测试时,单方向最大载荷200 N·m,初始载荷为0,0~50 N·m 之间按照5 N·m 递增,50~200 N·m 之间按照10 N·m 递增,测试完200 N·m 后,200~50 N·m 之间按照10 N·m 递减,50 N·m~0 之间按照5 N·m 递减;
(4)除更换砝码导致阻力测试有停顿以外,导轨载荷不变时,运行阻力测试连续进行。
3.2 试验测试流程
滚珠直线导轨阻力测试流程如图10 所示。
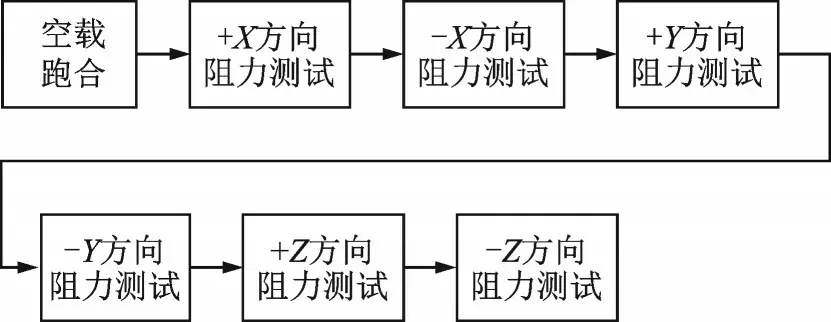
图10 滚珠直线导轨阻力测试流程Fig.10 Resistance force test process of rolling linear guide
4 试验结果分析
4.1 数据补偿
当外加力矩不变时,滚珠直线导轨正向、反向运动的阻力数值应该大小相等、符号相反。测试时,由于测试设备在导轨运动方向上存在高度差,导致正反向的运动阻力不一致,因此,在进行滚珠直线导轨数据分析前,首先对高度差导致的零位偏差进行补偿。具体补偿方法为:记给定载荷下10 次正向运动阻力平均值为Fx+,10 次反向运动阻力平均值为Fx-,定义补偿量为
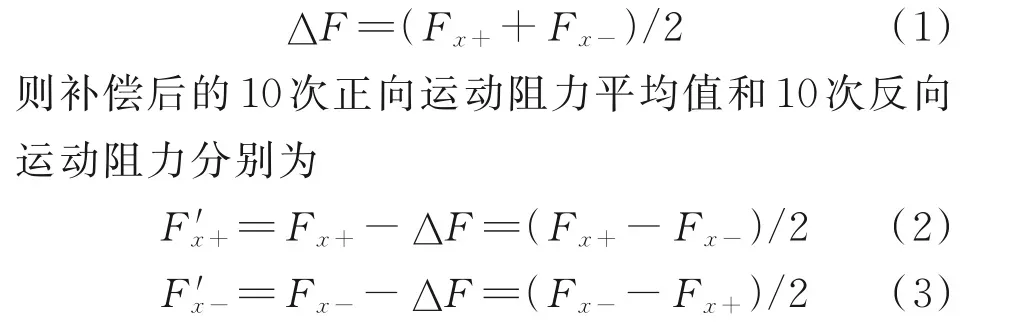
从式(2,3)中可以看出,补偿后,在给定载荷下,滚珠直线导轨正向、反向运动的平均阻力数值相等、符号相反。因此,利用补偿后的+X方向、+Y方向和+Z方向的数据对滚珠直线导轨的运行阻力和波动量等技术指标进行分析。
4.2 控制系统速度平稳性测试
定义速度平稳性为(vmax-vmin)/(vmax+vmin),测试前,对控制系统的速度平稳性进行测试。电机正向运动时,运动速度在598 ~603 r/min 之间波动,速度平稳性为0.83%;电机反方向运动时,速度在-606 ~-602 r/min 之间波动,速度平稳性为0.66%,满足设计指标的要求。
4.3 滚珠直线导轨阻力测试
绘制滚珠直线导轨在不同方向、不同载荷下的正向、反向运动的平均运行阻力如图11 所示。
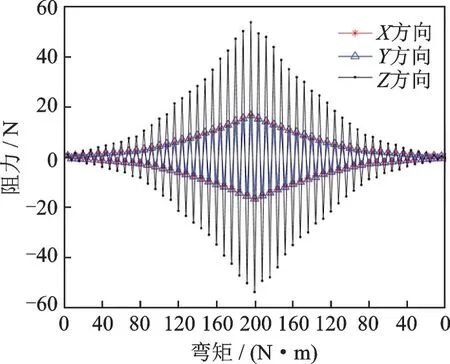
图11 滚珠直线导轨运行阻力曲线Fig.11 Average curves of resistance force of rolling linear guide
对图11 中滚珠直线导轨运行阻力曲线进行分析,得到以下结论:
(1)滚珠直线导轨运行阻力随着载荷的增加而增加。
(2)载荷越大,运行阻力增加的速度越快。
(3)滚珠直线导轨在承受MX、MY载荷时,两者曲线重合,与1.3 节中的滚动体载荷分布规律一致。
(4)滚珠直线导轨在承受MX、MY载荷时运行阻力的增加速度明显小于承受MZ载荷时运行阻力的增加速度。究其原因,导轨承受MZ载荷时的力臂B(20 mm)小于承受MX、MY载荷时的力臂L(40 mm),从而使得导轨承受MZ载荷时作用在滚动体上的法向载荷FZ大于承受MX、MY载荷时作用在滚动体上的法向载荷FX、FY,而载荷越大,运行阻力增加的速度越快,最终导致滚珠直线导轨承受MZ载荷时的运行阻力大于承受MX、MY载荷时的运行阻力。
4.4 数据波动分析
定义阻力波动量为(Fmax-Fmin)/(Fmax+Fmin),计算不同弯矩对应的波动量,计算0、5、…、200、…、5、0 N·m 等各个载荷点下波动量,将各载荷下的波动量连接成线,得到滚珠直线导轨运行阻力的波动量与力矩载荷的关系,如图12 所示。统计导轨在0~50 N·m(轻载)和50~200 N·m(重载)下运行阻力波动量的最大值和平均值,如表1所示。
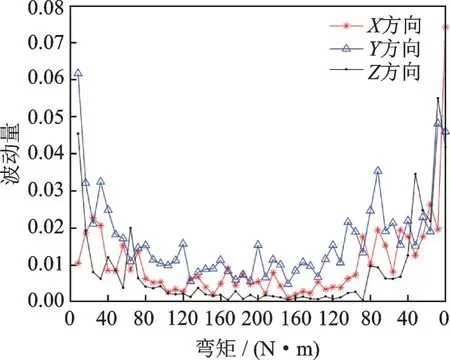
图12 滚珠直线导轨运行阻力波动曲线Fig.12 Resistance force fluctuation curves of rolling linear guide
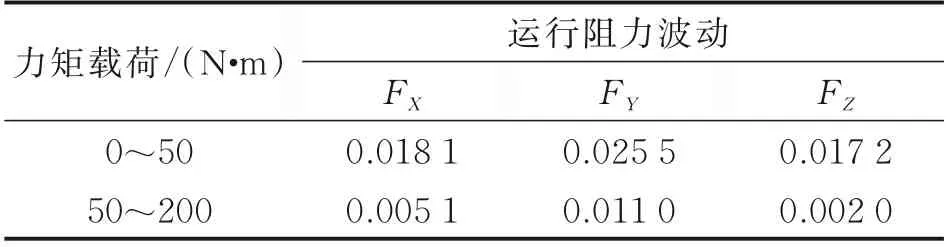
表1 滚珠直线导轨运行阻力数据波动分析汇总表Table 1 Summary table of rolling linear guide resistance force fluctuation
对图12 中的曲线和表1 中的波动量进行分析,得到以下结论:
(1)滚珠直线导轨运行阻力的波动量随着载荷的增加而减小,说明随着载荷增加,滚珠直线导轨运行更加平稳。
(2)滚珠直线导轨承受MZ载荷的运行阻力波动量小于承受MX、MY载荷时的运行阻力波动量,说明滚珠直线导轨在承受MZ载荷时运行更加平稳。这与导轨在承受MZ载荷时滚动体在整个运动过程中载荷不变、导轨在承受MX、MY载荷时滚动体在整个运动过程中载荷一直变化的受力情况一致。
4.5 曲线拟合
最小二乘法是求解最优化问题的经典方法,由勒让德和高斯在18 世纪初期分别创立,是曲线或者曲面拟合最常用最有效方法。递推最小二乘法在上一次迭代估计结果的基础上,利用新得到的数据根据递推算法对上一次迭代估计的结果进行修正,从而递推得出新的参数估计值。这样,对一个接一个的新数据进行一次次的参数估计,直到参数估计值达到所要求精度为止[15⁃17]。
首先采用二次多项式、三次多项式、四次多项和F=axb+c对滚珠直线导轨承受MX、MY、MZ载荷时运行阻力进行拟合,采用递推最小二乘法确定拟合公式的系数,获得拟合误差,然后利用均方根误差RMSE 和确定系数R⁃square 对拟合结果进行评价,如表2 所示。
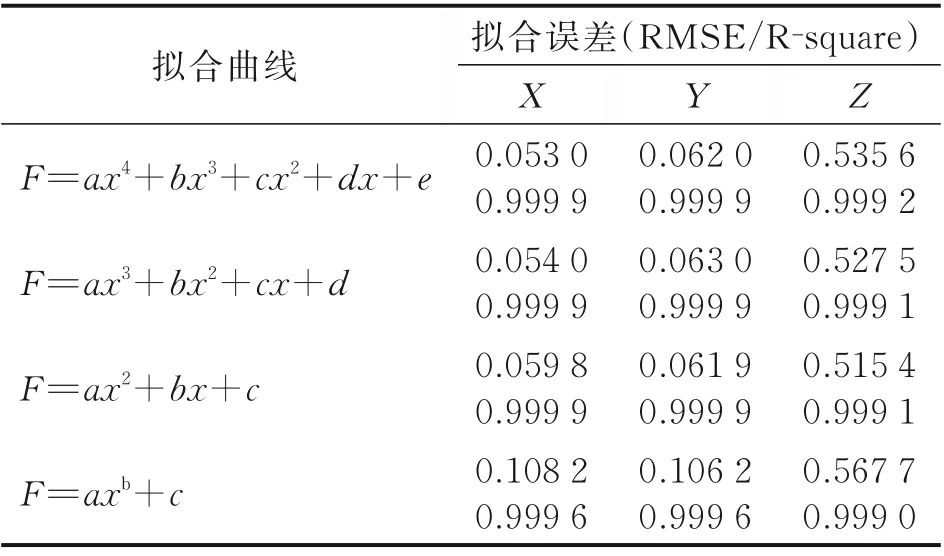
表2 拟合误差汇总表Table 2 Summary table of fitting errors
在进行曲线拟合时,RMSE 越小、R⁃square 越接近1,曲线拟合效果越好。从表2 中可以看出:几种拟合方式的确定系数R⁃square 都超过0.999,但是均方根误差RMSE 表明采用三次曲线、四次曲线进行拟合效果更好;四次曲线比三次曲线提高有限,但增加了很多的计算量。综合考虑拟合误差和计算量的大小,选取三次曲线作为滚珠直线导轨运行阻力与力矩载荷之间关系的拟合曲线。
利用三次曲线对滚珠直线导轨在承受单方向力矩载荷下的运行阻力进行拟合,得到最终的拟合曲线和残差分布分别如图13 和图14 所示,拟合公式和最大拟合误差如表3 所示。
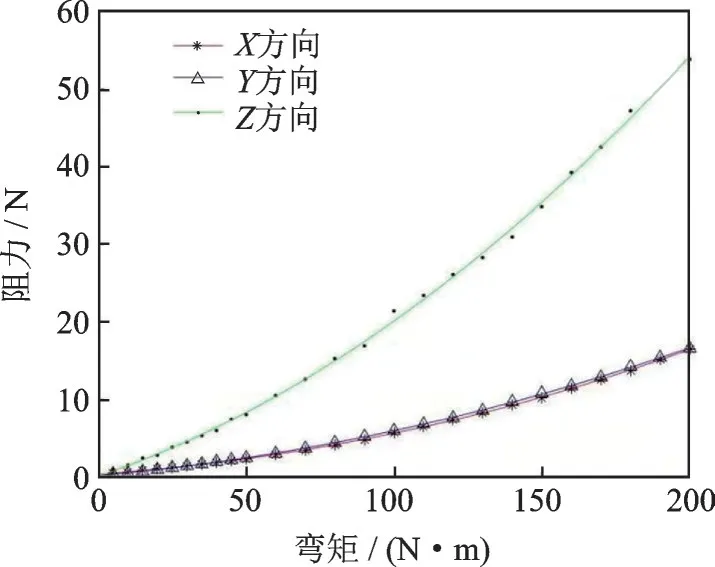
图13 滚珠直线导轨运行阻力曲线拟合Fig.13 Resistance force fitting curves of rolling linear guide
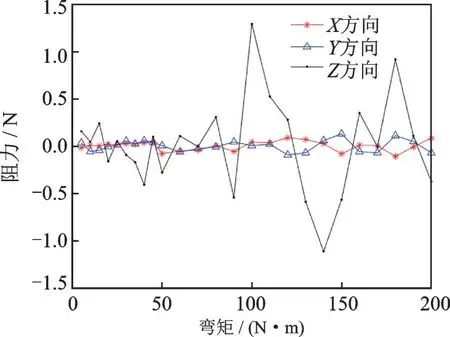
图14 滚珠直线导轨运行阻力拟合残差曲线Fig.14 Resistance force fitting residual curves of rolling lin⁃ear guide

表3 最终拟合公式和最大拟合误差Table 3 Final fitting formula and maximum fitting error
对图13、14 和表3 中的拟合公式和拟合误差进行分析,得到以下结论:
(1)采用三次曲线可以较好地拟合滚珠直线导轨运行阻力与单方向力矩载荷的关系。
(2)滚珠直线导轨在承受MX、MY载荷时运行阻力的拟合曲线几乎完全一致。
(3)MX和MY载荷下的残差基本小于0.13 N,MZ载荷下的残差小于1.30 N,这是由以下两个因素导致的:一是MZ载荷下的运行阻力相比MX和MY载荷下运行阻力数值更大,二是测试MZ载荷下的运行阻力时,动平台抵消Z向力矩时产生了附加的阻力,Z向力矩越大,作用在动平台滑轮处的附加阻力越大,引入的误差越大,最终导致MZ载荷下的残差相对较大。
5 结论
为了获得空间润滑状态下滚珠直线导轨运行阻力与单方向力矩载荷的关系,为在轨运行提供数据支撑,本文研制了一套滚珠丝杠导轨阻力测试设备。利用该设备对某型号用空间润滑状态下的GGB20AAL 四点接触滚珠直线导轨的运行阻力进行了测试,测试数据重复性良好,测试速度平稳,通过对数据进行补偿,找到了和运行阻力与导轨承载的力矩载荷之间的关系,测试结果与理论分析的趋势相同,主要结论如下:
(1)滚珠直线导轨运行阻力随着载荷的增加而增加,两者可以用三次曲线拟合。
(2)作用在滚动体上的载荷越大,运行阻力的增加量越大。
(3)滚珠直线导轨在力矩作用下的运行阻力表现出各向异性,MX和MY载荷下的运行阻力几乎完全一致,MZ载荷下的运行阻力大但运行更加平稳。
(4)在0~200 N·m 力矩载荷范围内,随着载荷增加,滚珠直线导轨的运行更加平稳。
(5)滚珠直线导轨的运行阻力可以用于在轨比对,支持滚珠直线导轨的在轨故障判定与预示。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
中学生理科应试(2021年10期)2021-12-07
石油化工设备(2020年5期)2020-12-11
东坡赤壁诗词(2020年4期)2020-09-02
轻兵器(2019年8期)2019-08-30
船舶标准化工程师(2018年3期)2018-09-12
求学·理科版(2017年10期)2017-12-19
婚姻与家庭·性情读本(2017年1期)2017-02-16
知识就是力量(2014年3期)2014-03-06
中学生数理化·高一版(2008年4期)2008-11-15
