
基于2UU-UPU并联机构的4足机器人设计
2022-03-23 07:16贾云博杜静恩施浩然赖磊捷
轻工机械 2022年1期
贾云博, 许 勇, 杜静恩, 施浩然, 赖磊捷, 徐 蕊
(上海工程技术大学 机械与汽车工程学院, 上海 201620)
随着科学技术的发展,一些危险环境下的工作和人类无法完成的任务都可以由机器人来替代。足式机器人是模仿动物的运动模式来进行设计的,足尖可以在工作空间内选择合适的支撑点,在多种地形有着良好的通过性,在复杂地形中能以合适的步态稳定行走。而多足机器人中,4足机器人由于其稳定性好,负载能力强,适应性良好,成为发展前景非常广阔的特种机器人之一,广泛应用于抢险救灾、军事侦查、地质探测和智能服务等领域[1-2]。因此近年来很多学者和研究机构针对4足机器人进行了深入的研究。
美国波士顿动力公司研制的Big Dog 4腿机器人[3-4],可以承载重物,且具有较快的移动速度和较强的平衡能力,最初设计目的是用于军事方面。日本东京工业大学 Ota研发了一种轻量化的并联移动机器人 Para-walker[5],采用串并混联机构使其具有更大的工作空间和更稳定地移动。北京理工大学王军政等研发的哪吒4足机器人[6],采用了6-SPS并联机构设计腿部结构,并将动平台作为移动机器人的足端。由于6-SPS并联机构具有6个自由度,因此哪吒机器人具有很高的自由度与灵活性,但是由于每条腿都有6个自由度,所以至少需要6个驱动来实现运动,控制难度较高。
目前,4足机器人的研究向高负载、高灵活性和高智能化发展。已有的大多数4足机器人采用串联腿的设计结构,优点是灵活性好,缺点是负载方面存在不足。课题组提出一种将并联机构2UU-UPU作为腿部基本构型的4腿机器人,使其具有负载大、环境适应性强的特点。以此为研究目标,首先对单条腿中的并联机构进行自由度分析,建立坐标系以及求该机构的逆解表达式;进而求得该机构的工作空间,验证该机构作为腿部运动构件的可行性;最后进行4足机器人的步态规划和仿真分析。因此,该课题的研究具有重要价值和工程实际意义。
1 4足机器人新型并联腿机构构型
课题组提出的4足机器人新型并联腿机构如图1所示。它包括大腿和小腿2部分:大腿部分由2UU-UPU并联机构组成,包括1个与机器人身体相连的上平台,1个与小腿固接的下平台,上下平台为2个全等的等边三角形,上下面之间有3条支链,包含1个UPU支链和2个UU支链;小腿与下平台的夹角为45°。采用至少3个电机对该腿部结构进行驱动:其中1个位于驱动UPU支链的P副沿着杆长方向移动;另外2个设置在2个UU支链靠近上平台的U副上,2个电机的驱动方向是垂直的。

图1 新型并联腿机构三维构型Figure 1 3D configuration of new parallel leg mechanism
4足机器人的关节配置对于整个机器人的性能起至关重要的作用,合理的关节配置可以让4足机器人的稳定性更好,灵活性更高,复杂地形适应能力也会更强。目前有如下4种关节配置方式:①前后膝式;②前膝后肘式;③前后肘式;④前肘后膝式。如图2所示。4种结构各有利弊,可根据不同的需求选用不同的结构。根据前人的研究[7-8],前肘后膝式结构紧凑,足底与地面的滑动较小,灵活性较高,适合大负载结构,因此选择前肘后膝式。

图2 4足机器人腿部关节配置Figure 2 Joint configurations of quadruped robot legs
2 并联腿机构自由度计算
据Grubler-Kutzbach准则[9],自由度求解公式为:
(1)
式中:d为阶数,取值5;n为构件数,取值6;g为运动副数,取值7;fi为第i个运动副的自由度数,ν为冗余自由度,取值0;ζ为局部自由度,取值0。
对于2UU-UPU机构,虎克副的自由度为2,移动副的自由度为1,将以上的数据代入式(1)中可以得出F=3。即2UU-UPU机构的自由度为3,该2UU-UPU并联机构的自由度始终为2个转动加1个移动。
3 位置逆解求解
图3为并联腿的几何模型。在A1点处建立空间直角坐标系O-XYZ,X轴与A1A2平行,上平台在O-XY面内,Z轴与O-XY面垂直;移动坐标系o-xyz位于足尖的中心,其中x轴与B1B2平行,z轴沿co方向。co与平面B1B2B3的夹角α为45°,并且在点c处与B3D相交,点D是B1B2的中点。2-UU-UPU并联腿的逆运动学是通过已知足尖的坐标o=(x0,y0,z0)的情况下求输入参数,即U副在2个互相垂直方向上的转动角度和移动副P的移动距离。

图3 并联腿机构的运动学模型Figure 3 Kinematic model of parallel leg mechanism
A3在空间直角坐标系O-XYZ中坐标可表示为
(2)
式中:l1为上下平台2个全等等边三角形的边长,A3为上平台与移动副相接的U副中心点。
U副在2个互相垂直方向上的转动角度为θ1和π/2-θ2,因此可求得B1点的坐标:
B1=(l2·sinθ1,l2·cosθ1·cosθ2,l2·cosθ1·sinθ2)。
(3)
式中:l2为A1B1和A2B2的长度,θ1为A1B1到面O-ZY的夹角,θ2为A1B1到面O-XY的夹角。
由B1知D点的坐标为
D=(l2sinθ1+l1/2,l2cosθ1cosθ2,l2cosθ1sinθ2)。
(4)
足尖o和D在X轴上的坐标相同,根据xB1+lB1D=x0可得
(5)

(6)
其中:

(7)
B3和D在基坐标系中的坐标可表示为:
(8)
(9)
式(4)和式(9)是D点坐标在不同坐标系中的表示方法,因此可求得β。可由‖B3-A3‖=d1求得
(10)
由式(5)、(6)和(10)可知,在足尖运动轨迹给定的情况下可求得驱动函数。
4 并联腿机构足端工作空间求解
机器人的工作空间是指机器人末端执行器上的参考点(即图3中o点)所能达到的空间点的集合。对于足式机器人来说,求解工作空间是一项十分重要的指标,直接影响到机器人的运动性能,根据得到的工作空间的形状来判断腿部构型是否达到机器人的运动要求。机器人的工作空间有3种类型:可达工作空间、灵巧工作空间和全工作空间[10]。后续的研究需要考虑到足尖所能达到的最大运动范围,因此课题组选用可达工作空间;基于求得的运动学逆解,在MATLAB中利用坐标搜索法求解并联腿的工作空间。
4.1 工作空间求解步骤及参数设定
在求解该并联机构的工作空间前,首先要确定其结构约束条件和设定必要的结构参数,在约束条件的范围内进行搜索。
1) 参考4足动物的关节比例,将腿部的2个关节设计为等长结构,根据设计目标可得腿部结构参数:l1=5 cm,l2=l3=40 cm。
2) 由结构参数和运动学逆解,并经调试后确定X、Y和Z轴搜范围为:-40 cm≤X≤50 cm,-60 cm≤Y≤40 cm,-90 cm≤Z≤0 cm,搜索步长为1 cm。
3) 由于腿部机构的结构较为紧凑,为避免运动过程中发生干涉,限定θ1的活动范围为-9π/20≤θ1≤9π/20,θ2的活动范围为19π/20≤θ2≤π/20。
4) 为保证腿部与身体垂直的方向上有较大的运动范围,A3B3上移动副d1的搜索范围为35 cm≤d1≤45 cm。
5) 另外足尖的高度不应高于B2点的高度, 因此z≤l2·cosθ1·sinθ2。
4.2 足端工作空间求解结果
结合运动学逆解式(5),(6)和(10),使用边界搜索算法,并输入参数和约束条件,在MATLAB中进行编程可以得到图4所示的4足机器人单足工作空间及其在3个坐标平面上的投影。
图4(a)为4足机器人单足工作空间;图4(b)为工作空间在XOY面上的投影;图4(c)为工作空间在ZOY面上的投影;图4(d)为工作空间在ZOX面上的投影。从图中可以看出,腿部工作空间形状饱满,在XYZ轴上的工作长度较大,适合于并联机械腿实现多种形式的步态,在行走时可以实现较高的抬腿高度和较大的步长。
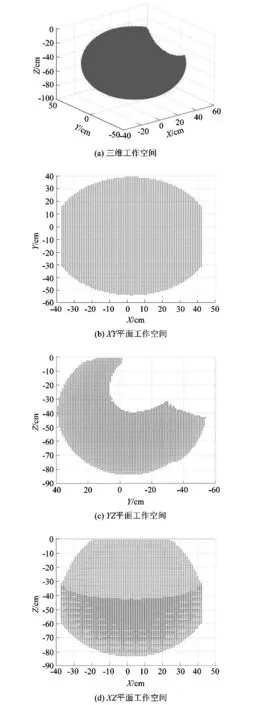
图4 并联腿机构足端工作空间Figure 4 Foot workspace of parallel leg mechanism
5 步态规划与仿真
5.1 4足机器人建模
在SolidWorks三维建模软件中建立4足机器人的模型,为了使仿真更方便,求解速度更快,因此要对4足机器人的结构模型进行简化。图5所示为能满足腿部并联机构运动特征的4足机器人模型,由身体部分、左前腿、左后腿、右前腿和右后腿组成。对模型进行材料设定,并将模型以x_t格式进行保存,为下一步在ADAMS软件中进行虚拟样机仿真做准备。

图5 4足机器人模型Figure 5 Quadruped robot model
5.2 4足机器人步态规划
为了满足4足机器人在不同环境下能稳定移动,需要采用不同的步态。常用的步态有三角步态、对角步态、溜蹄步态和跑跳步态等[11]。在较为平坦的路面上行走时,对角步态较为常用,可以提高机器人的行进速度,并且具有良好的稳定性。在对角步态中,机器人的迈腿顺序为:右前腿和左后腿同时迈出1步,落地之后,左前腿和右后腿再同时迈出,同样的迈腿方式循环下去,就构成了对角步态。
4足机器人对角步态示意图如图6所示,箭头所指为机器人运动方向,L1,L2,R1和R2分别为左前腿、左后腿、右前腿和右后腿,虚线为前一步的动作,从图6(a)到图6(b)为L2和R1向前运动,L1和R2此时为支撑腿;从图6(b)到图6(c)为L1和R2向前运动,L2和R1此时又为支撑腿。在对角步态中,由于运动时误差的出现,以及环境的影响,整个机器人的质心无法始终处于机身的对角线上[12],需要仿真分析来验证其稳定性。
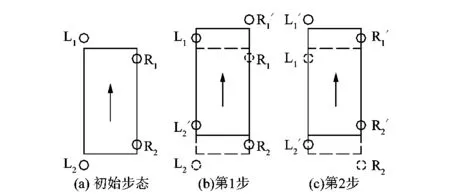
图6 4足机器人对角步态示意图Figure 6 Diagonal gait of quadruped robot
为了使足端在与地面接触时不产生滑动,以及具有较小的反作用力,抬腿和落地时的速度应为0,因此在Y轴方向(即机器人运动方向)上采用复合摆线进行足尖步态规划[13],4足机器人摆动腿的足端轨迹为:
x(t)=S(t/T-1/(2π)*sin (2πt/T))-20;
(11)
z(t)=H(1/2-1/2*cos (2πt/T))-70。
(12)
式中:S为4足机器人的步长,H为抬腿高度,t为采样时间,T为步态周期。
根据求得的机器人单足工作空间,设S=35 cm,H=20 cm,T=0.4,在MATLAB中画出摆动腿的轨迹,如图7所示。支撑腿与地面无滑动的前提下,推动机器人身体向前移动,此时支撑腿足端轨迹反向水平后移,因此其在Z轴方向上的位移始终为0,可利用机器人逆运动学获得各驱动的驱动函数。
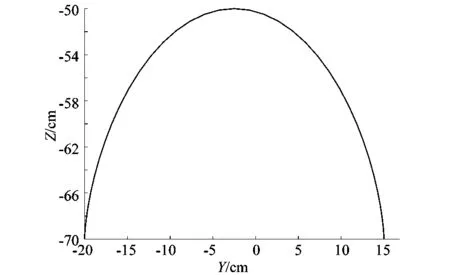
图7 并联腿机构足端轨迹规划Figure 7 Foot trajectory planning of parallel leg mechanism
5.3 虚拟样机仿真与分析
将5.1节所述的4足机器人模型导入ADAMS,建立虚拟样机模型,如图8所示。根据机构的运动关系,添加53个运动副和约束,以及12个驱动,4足机器人在环境中受到重力和与地面的相互作用力,因此设置每1 kg物体重力大小为9.8 N,方向沿Z轴正方向,在足端和地面之间建立接触力,接触力参数设置如图9所示。
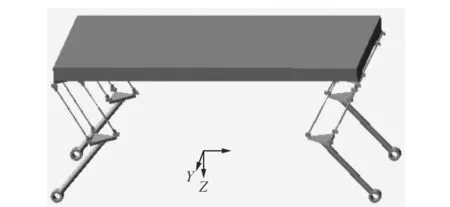
图8 4足机器人虚拟样机模型Figure 8 ADAMS model of quadruped robot
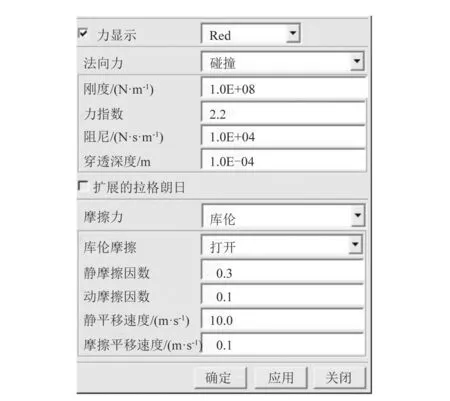
图9 接触力参数设置Figure 9 Contact force parameter setting
在每条腿动平台上的U副以及移动副上添加驱动以及驱动函数,开始进行仿真。仿真结束后,在后处理模块中可以获得仿真结果并输出仿真曲线。4足机器人的质心在X轴、Y轴和Z轴3个方向的位移曲线分别如图10所示。X轴方向为机器人的前进方向,可以看出前进位移轨迹增长比较平稳,质心在Y轴和Z轴方向有一定的波动,波动幅度较小,说明整个运动过程机器人可以稳定行走。

图10 机器人整体质心位移仿真曲线Figure 10 Displacement simulation of global centroid of quadruped robot
6 结论
课题组设计了一种基于2UU-UPU并联腿结构的新型4足机器人,通过对2转动1移动自由度的驱动,使腿部具有较高的灵活度,控制也较为方便。通过运动学逆解,以及单腿结构工作空间的分析,证明了该机构作为4足机器人腿部结构具有理想的工作空间,为进一步进行步态设计及优化奠定了基础。利用ADAMS对所设计的新型4足机器人进行动力学仿真,结果表明驱动函数以及步态规划合理,可以达到稳定行走的目的。
后续可针对多模式步态以及控制函数的优化进行研究,以应用于资源探测、危险环境采样等多种环境工作。因此利用2UU-UPU结构作为腿部的4足机器人具有进一步研究的价值。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
包装工程(2022年10期)2022-05-27
今传媒(2020年5期)2020-06-08
软件(2020年3期)2020-04-20
电子制作(2019年23期)2019-02-23
科学之谜(2018年4期)2018-09-17
消费导刊(2018年8期)2018-05-25
健康女性(2017年7期)2017-08-02
燕山大学学报(2015年4期)2015-12-25
科学生活(2015年2期)2015-04-09
