
基于实时数据采集和识别的平衡光学锁相环研究
2022-03-24 09:12王恒,张荣,孔梅
科技创新与应用 2022年6期
王 恒,张 荣,孔 梅
(长春理工大学理学院,吉林 长春 130022)
窄线宽、高稳定度光源在高速率相干通信[1-5]、高精度光谱学[6]、引力波探测[7]等领域有大量需求。在实际的使用中,外界环境中的温度变化和振动,以及自身驱动电流的不稳定都会使激光器输出频率产生波动,降低激光器的频率稳定度[8]。激光稳频技术可分为主动稳频和被动稳频2 种,被动稳频技术如温度控制、机械隔振等对激光器频率稳定度提升有限[9]。主动稳频技术将激光器频率稳定到另一稳定参考频率上,如原子或分子跃迁谱线、高Q 值光学谐振腔透射峰中心或者另一稳定激光器等[10],能有效提高激光器的频率稳定性。光学锁相环是一种有效的主动激光稳频技术。
在各种光学锁相环中,平衡锁相环结构简单。在锁相过程中,传统平衡锁相环需要传输一个残余载波,以确保当信号光与本振光相位差为零时,仍能进行相位锁定,因此在平衡环中需要进行二次解调[11],且对激光器线宽和环路延迟有严格要求[12-13]。本文基于光学平衡锁相环基本原理对其进行了改进,使用高速数据采集卡和高速数字频率解调处理单元完成两路激光器间相位和频率误差信号的识别及本振激光器的反馈控制。通过对2 台窄线宽光纤激光器的锁定实验,实现环路锁定时间超过2 h,396 s稳定锁定时间内单个激光器频率波动小于20 kHz,比自由运行状态提高约300 倍。如果主激光器频率稳定性好,则本振激光器频率稳定度可至少提高3 个量级。
1 外差平衡光学锁相环设计
设计外差平衡光学锁相环路结构如图1 所示,主激光器和本振激光器输出光通过3 dB 光纤耦合器分为上下2 路并进入平衡探测器,平衡探测器对这2 路光进行光电转换和共模噪声抑制处理,输出包含两激光器相位和频率误差信息的电压信号VBD,该信号与参考信号fr(角频率为ωr)经混频处理输出混频信号Vmix。通过采用高速数据采集卡(DAQ)对信号进行模数转换,高速数字频率解调单元将采集的数字信号进行频率解调,得到混频信号Vmix的频率值,该值即激光器拍频输出信号与参考信号的频率差值。为了得到与参考信号同频的光拍频信号,我们将该频率差值作为本振激光器闭环比例积分微分(PID,Proportion Integration Differentiation)控制的误差输入值,控制软件通过闭环PID 反馈调节本振激光器的输出频率,达到实时控制本振激光器稳定输出的目的。
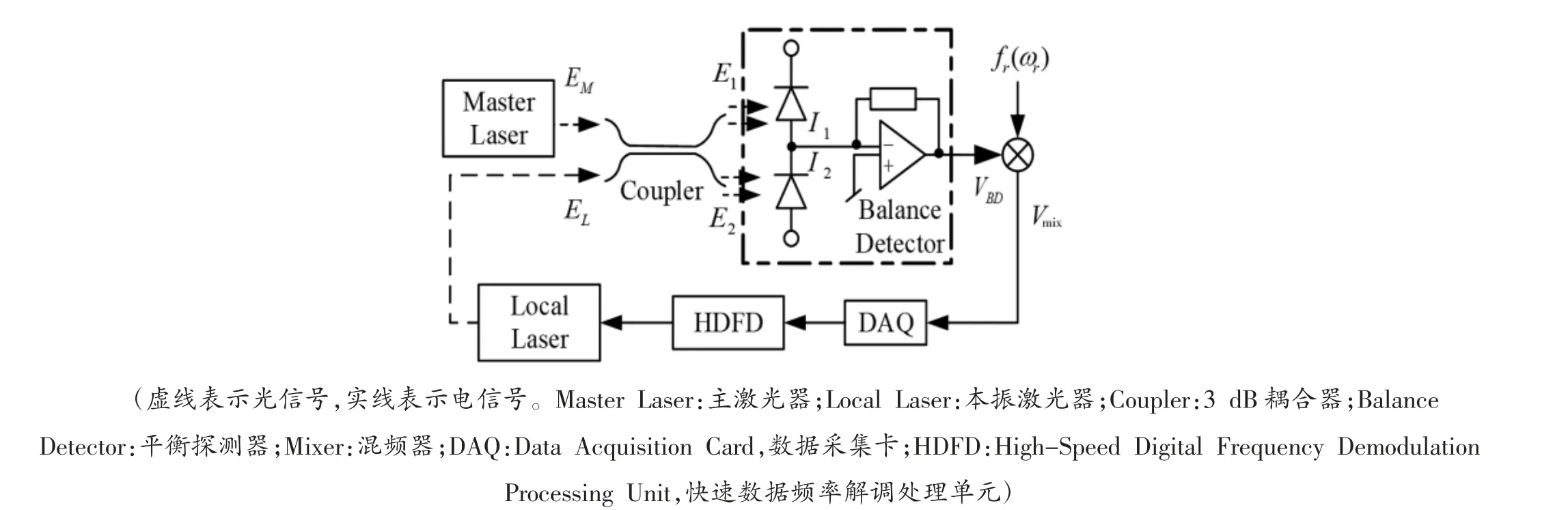
图1 光纤激光器外差平衡光学锁相环结构图
设本振激光器和主激光器输出光复电场分别为EL和EM,其表达式:

其中,n1(t)和n2(t)分别为两光电二极管的噪声且互不相关,Δφ=φM-φL为两激光器初始相位差。光电流经过跨阻放大器转化为电压信号V1(t)和V1(t),对2 个信号求差得到平衡探测器输出电压信号VBD(t),设跨阻放大器增益为R,则:

其中,n(t)=n1(t)-n2(t),为平衡探测器总噪声。平衡探测器输出信号频率中包含两激光器差频ωM-ωL,该信号与参考频率信号fr在混频器内混合鉴相。由混频器输出特性可知,若将输出其分解为多个信号叠加形式,则含两输入信号频率和相位差值的信号幅值最大,其表达式:

其中ωe=ωr-|ωM-ωL|,Kmix为混频器传输系数,nmix(t)为混频器噪声。使用高速数据采集卡对混频器输出信号进行模数转换,高速数字频率解调单元将采集的数字信号进行频率解调,其中幅值最大的频率信号,即频率为ωe的信号,将该频率信号作为闭环数字PID 调节输出信号,控制软件通过闭环PID 反馈调节本振激光器的输出频率。
2 实验测试
2.1 自由运行激光器频率稳定度的实验测试
激光器频率稳定度定义为在一段稳定运行时间内激光器频率漂移量Δυ 和激光器振荡频率υ 之比:

本文实验中主激光器、本振激光器均为NKT-Photonics 公司的E15 窄线宽光纤激光器。我们通过测量本振激光器和主激光器之间的拍频频差显示本振激光器相对于主激光器的稳定情况。首先测量自由运行时激光器的频率稳定度,图2 为其中3 次的测量结果,两激光器拍频在1 min 内波动标准差为5.76 MHz。由于2 个激光器性能基本相同,所以认为频率波动由二者共同引起,则单只激光器频率波动是测得标准差的一半,根据公式得自由运行时单个激光器的频率稳定度为1.49×10-8。
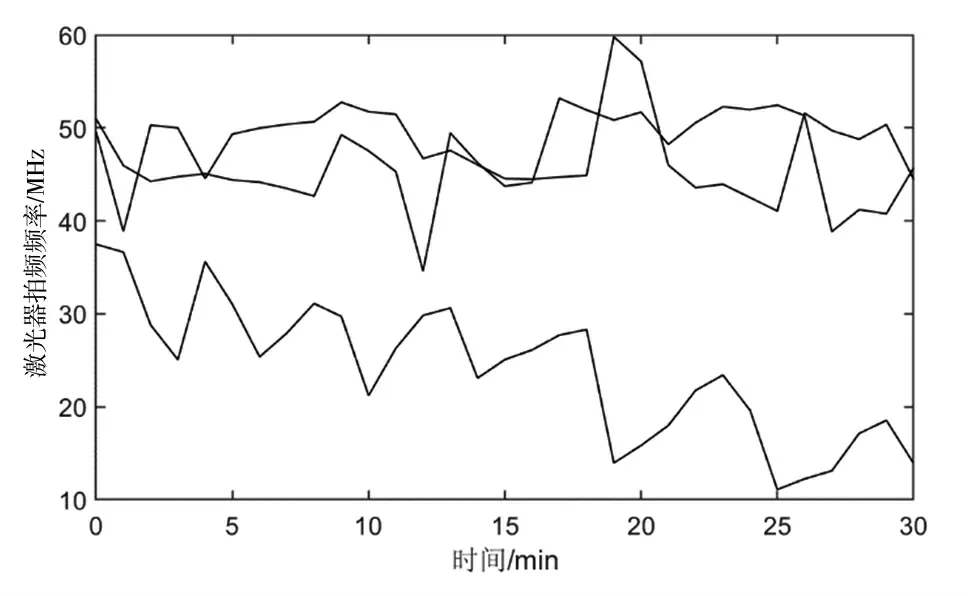
图2 自由运行时两激光器拍频随时间波动的3 次测量结果
2.2 锁定状态激光器频率稳定度实验测试
设置参考信号为36 MHz,数据采集卡采集频率期望值为2 MHz,调节数字PID 控制参数,设置合适反馈调节步长,当数据采集卡采集到的频率值稳定在2 MHz 附近时,环路达到锁定状态,此时两激光器频差为38 MHz。锁定状态下数据采集卡采集频率随时间波动如图3 所示,本振激光器的频率能与主激光器保持稳定的预设频差,虽然偶尔频差较大,但能较快地被拉回到预设频差附近时,实验中环路保持锁定状态超过2 h。

图3 环路长锁定状态DAQ 采集频率随时间变化
考虑到使用主激光器和本振激光器频率稳定度一致,实验实际上是将本振激光器的频率锁定到了主激光器上,使二者之间保持固定的频差。如果主激光器有更高的频率稳定度,则通过光锁相环锁定后的本振激光器的频率稳定度会接近主激光器。因此,这里我们可以用本振激光器与主激光器之间频差的稳定性反映锁相环的锁定效果。截取图3 中312 s-708 s 时间段内的数据,如图4 所示,计算得两激光器频差的标准差为20 kHz,相对于自由运行状态提高了近300 倍。如果主激光器有更好的频率稳定度,则锁相误差信号会更加稳定,锁定效果会更好,本振激光器频率稳定度保守估计也会提高3 个数量级。
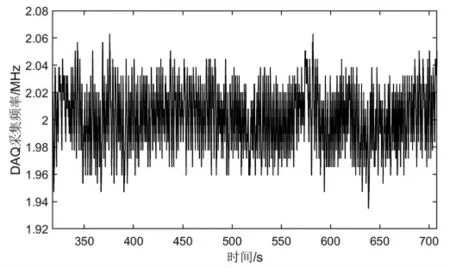
图4 稳定锁定状态下数据采集卡采集频率随时间变化
3 结论
我们利用高速数据采集卡配合高速数字频率解调处理单元设计了外差平衡光学锁相环,完成了两光纤激光器锁相环实验研究,取得了很好的锁定效果。本方案中数据采集卡对频率和相位误差进行模数转换,然后通过数据频率解调处理单元完成频率解调,有效避免了系统时域噪声对误差信号的影响。本方案的主要特点是能实现高精度频率稳定,理论上,本方案可使本振激光器与参考信号(目前能到μHz 量级)的频率稳定度一致,当然实际中稳定精度会受到频率解调精度和反馈调整精度的影响。此外,数字PID 的使用使得环路参数,如两激光器锁定频率、反馈调节步长等调节便捷,环路入锁容易。
猜你喜欢
无线互联科技(2022年4期)2022-05-11
智慧电力(2022年1期)2022-03-02
城市道桥与防洪(2022年1期)2022-02-25
河北工业大学学报(2021年4期)2021-09-23
宇航计测技术(2021年3期)2021-08-17
电子技术与软件工程(2019年10期)2019-07-20
电子产品世界(2016年1期)2016-03-07
电脑知识与技术(2015年23期)2015-11-13
科技创新导报(2014年11期)2014-11-05
现代电子技术(2009年14期)2009-09-05
