基于同期光学与微波遥感的茅尾海及其入海口水体悬浮物反演
2022-03-24 09:05丁波李伟胡克
自然资源遥感 2022年1期
丁波, 李伟, 胡克
(1.中国地质大学(北京)海洋学院,北京 100083; 2.中国地质调查局烟台海岸带地质调查中心,烟台 264011; 3.新玛科技(北京)有限公司,北京 100085)
0 引言
悬浮物是指悬浮于海水中的固态物质,包括有机成分(如碳水化合物、蛋白质、生物残骸、排泄物和分解物等)和无机组分(如陆源矿物颗粒、悬浮泥沙、黏土以及人类活动产生的颗粒和溶解物等)[1-2]。悬浮物浓度是衡量近海海水清澈度和其他成分的重要参数,尤其是位于海湾、河流入海口、近海等区域,受陆源物质、人类活动和海洋动力等因素的影响[3],较高的悬浮物浓度极大地降低了光线的穿透能力,不仅直接影响了水体生态条件比如浮游生物繁育[4-5]、生蚝养殖、鱼类生长,以及污染物扩散等[6],同时也影响着河口变化及海岸带冲淤过程。悬浮物浓度高低,在光学遥感上表现为光谱反射率、水体清澈度和水色等光学特性[7-8]; 而在微波遥感上反映为后向散射系数、粗糙程度和介电常数等特征。
悬浮物的监测方法主要包括常规实地调查和遥感反演。常规方法是乘船逐点采样-化验成分-分析数据[9],这种方法调查速度慢、周期长,费用高,且只能获得在时间、空间分布上都很离散的少量点数据。遥感反演得益于卫星技术的发展,传感器具有快速、高效且重访周期短等优势,能够快速获取任一区域内水体遥感影像,实时监测其悬浮物的空间分布和动态变化,克服了常规方法的不足,因此受到广泛关注。
光学遥感悬浮物反演理论依据是水体的光谱反射率,不同物质成分的水体拥有不同的光谱反射率,一般来说,纯水的光谱反射率较低,而悬浮物的光谱反射率较高[10-12]。过去的20 a里,众多的学者在悬浮物浓度反演方面开展了大量的研究工作并取得了可观的研究成果,反演算法涵盖从单波段[7,13]到多波段[2, 13-17],从低分辨率[2, 14-16, 18-20]到高分辨率[8,12,17,21]。而微波遥感反演悬浮物的理论核心是SAR图像的后向散射系数,一个包含物质微观结构(也包含浑浊水体或悬浮物)表面细节(粗糙度、几何形态、复介电常数等)的基本量[22-23]。根据大量学者的研究,近海悬浮物浓度影响了海水的组分、粒径以及海水浑浊度等物理属性,而海水的组分和粒径跟水体的后向散射系数有密切的关系并对其产生着影响,这一特征最终在雷达影像上得到一定的反映[24-28]。
近些年来,学者更多利用多光谱遥感开展各类水体的悬浮物浓度反演,而较少利用微波遥感开展相关研究。本文针对同一目标海域,利用2种同时期获取的不同类型的国产数据源(GF-1C和GF-3)开展悬浮物遥感反演分析,并结合野外采样数据进行对比,讨论并分析了2种反演结果的可靠性和准确性。
1 研究区概况及数据源
1.1 研究区概况
茅尾海地处广西钦州湾,是一个半封闭内海(N21°30′~21° 55′,E108°25′~108°45′),由一条狭窄的水道与北部湾相连(图1)。潟湖海岸线长约120 km,东西宽约14 km,南北纵深约17 km,面积约134 km2。平均水深为0.1~5 m,最深处可达29 m。
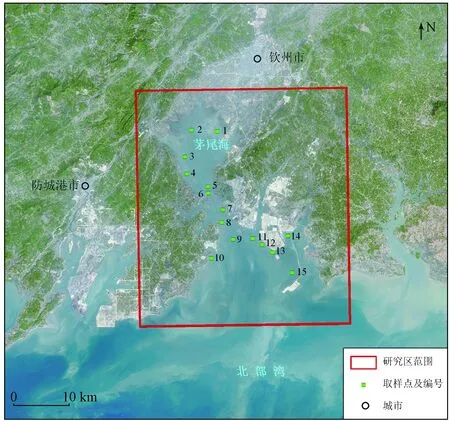
图1 研究区域与野外采样点分布
茅尾海上游汇集大榄江、钦江和茅岭江等3条常年性河流,均发源于上游山区,地质构造复杂,地层主要包括: 下层为下古生界志留系,表层为覆盖较厚的第四系,3条主要河流每年通过径流为茅尾海输入大量陆源泥沙。茅尾海内海常年海面平静,泥沙充沛,饵料丰富,是广西重要的海洋牧场,也是中国著名的生蚝养殖基地,同时兼有对虾、青蟹、鱼类及贝类养殖; 因其内海海域开阔,岛屿众多,也是风景优美的旅游胜地。茅尾海入海口两侧分布着2处重要的基础设施: 东侧为钦州港,包含多个人工岛和防护堤,西侧为防城港核电站,修建了2条短的平行防沙堤和进水通道,以及2条狭长的排水通道。
1.2 采样数据
水样采集严格按照海岸带综合地质调查技术规范要求执行[29]。研究区内水样采集点共计15处,具体分布如图1。样品采集时间为2019年9月18—20日上午8: 00~10: 00,潮汐资料显示该时间段处于高潮期。每个采样点均采集3份样品,采样深度(水面向下)分别为0~0.5 m,5 m,10 m,样品经由专门的样品箱封存,然后带回实验室进行浓度测试。最终共计45份样品按计划进行了送检并测试分析,具体分析结果见表1。
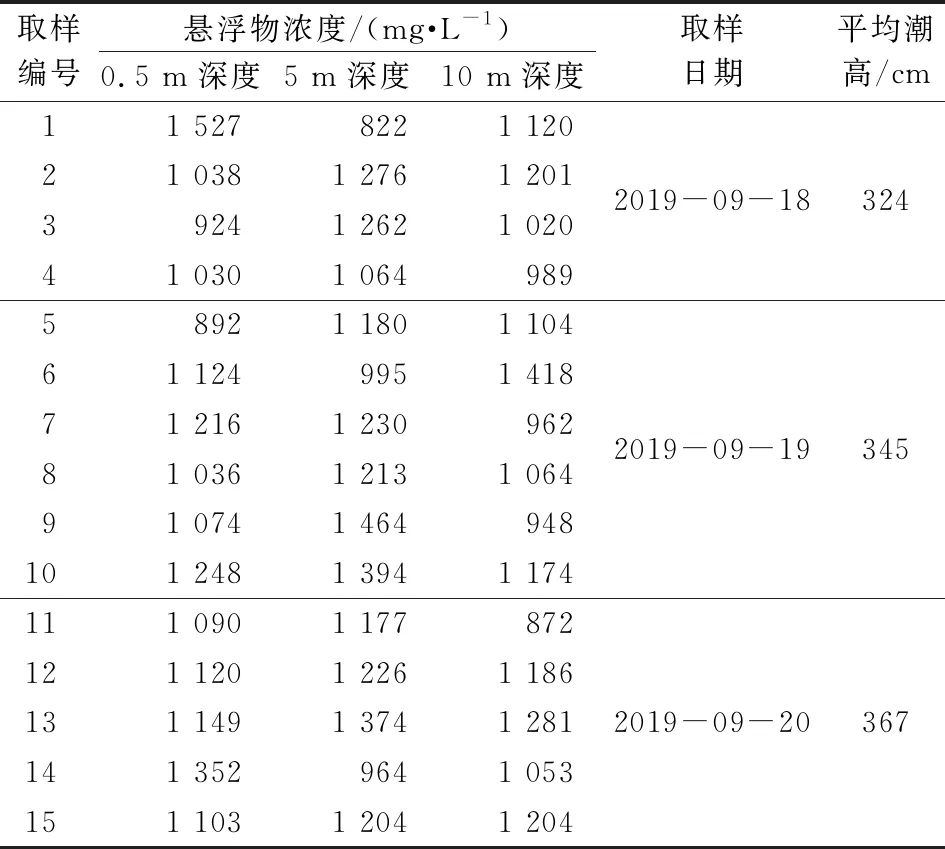
表1 研究区悬浮物浓度野外采样数据
1.3 遥感数据集
高分专项是我国于2010年5月经由国务院审议并批准实施的高分辨率对地观测系统重大专项之一[30],目前已发射了14个卫星系列(GF-1—GF-14),传感器类型从光学到雷达,轨道从太阳同步到地球同步,拍摄能力从全色、多光谱到高光谱等,构成了一个具有高空间分辨率、高时间分辨率和高光谱分辨率能力的对地观测系统,其中7个卫星系列已投入民用。
GF-1是高分专项的首发光学遥感卫星,包括后续发射的姊妹星GF-1B,C,D,全色影像空间分辨率为2 m; 多光谱影像空间分辨率为8 m,光谱范围包括蓝光波段(0.45~0.52 μm)、绿光波段(0.52~0.59 μm)、红光波段(0.63~0.69 μm)以及近红外波段(0.77~0.89 μm)。GF-3是我国首颗C频段多极化合成孔径雷达(synthetic aperture Radar,SAR)卫星,传感器包括12种成像模式,能够高时效地实现不同应用模式下获取1~500 m空间分辨率、10~650 km幅宽的微波遥感数据。本文所用数据具体参数见表2。
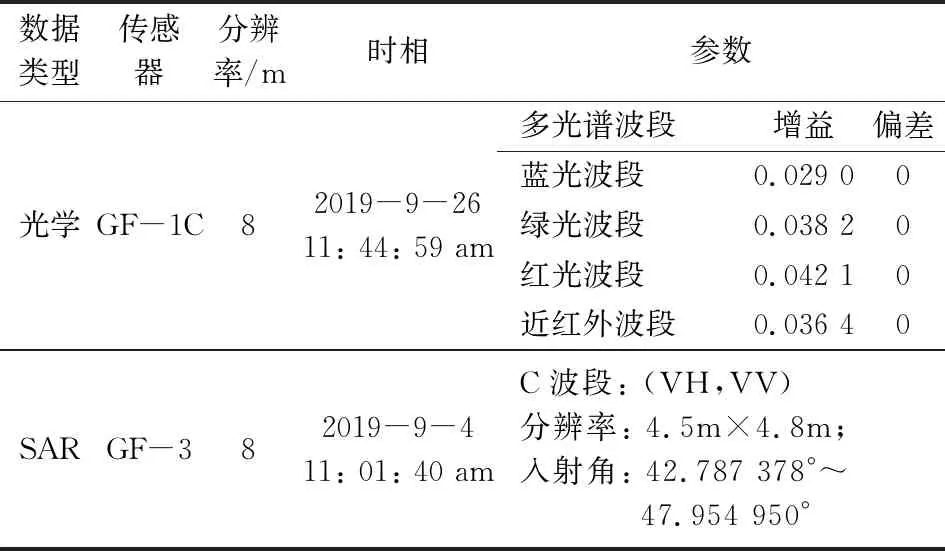
表2 研究区遥感影像详细信息
上述2类数据均可用于悬浮物浓度反演。根据GF-1和GF-3的数据覆盖同步性,最终选取时相为2019年9月份的GF-1多光谱影像和GF-3 SAR影像各1景作为研究区悬浮物反演遥感源数据。同时收集了区内的地形数据及卫星参数信息作为辅助数据,为影像预处理提供基础参考。
2 研究方法
2.1 光学遥感悬浮物水体提取
一般来说,悬浮物浓度与其光学属性在不同水域有着较大的差异,但在光谱特征上表现出一致的“双峰”特性[26, 31-32]。图2表明,悬浮物光谱“双峰”敏感波段范围主要集中在620~720 nm和790~840 nm光谱范围,这与GF-1多光谱波段的红光波段和近红外波段光谱范围高度契合。
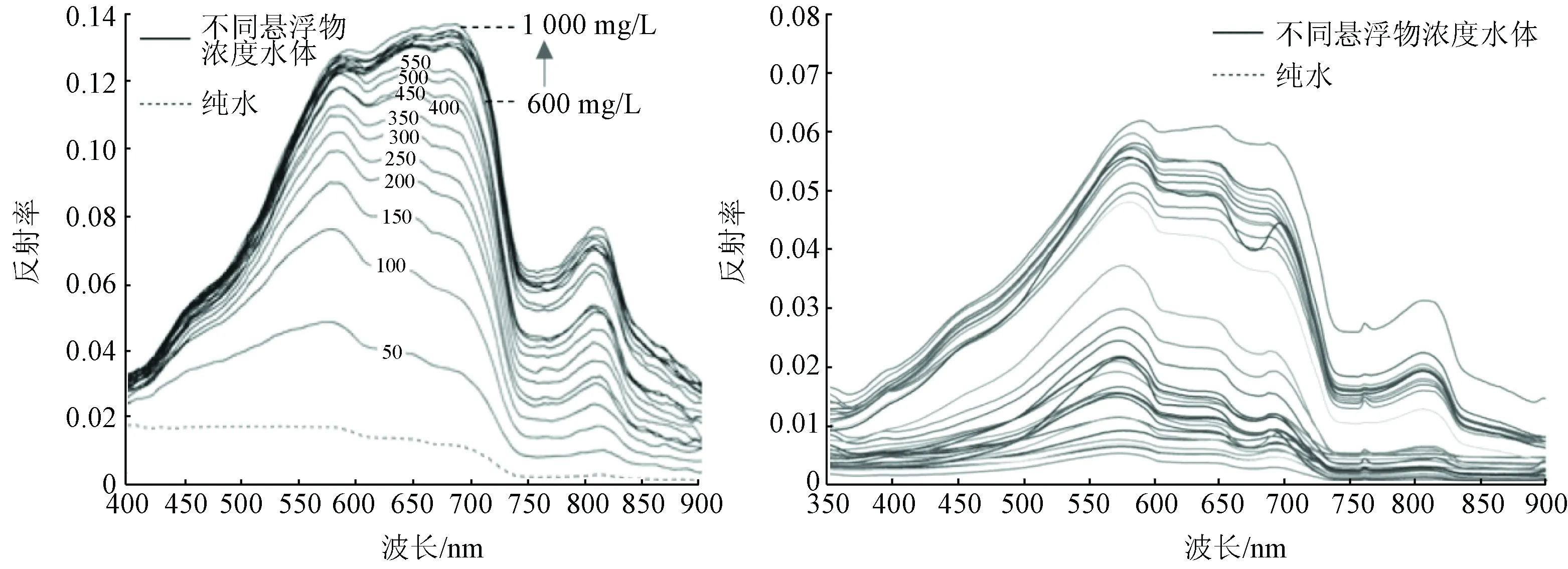

(a) 实测光谱曲线(b) GF-1光谱曲线
悬浮物浓度CTSM与多光谱反射率Rrs存在较好的相关性[17,32-33],本文基于已有成熟的理论算法,利用影像上的水体红光波段和近红外波段的光谱反射率采用双波段比值,进而等效获得Rrs,并求取相关系数,在此基础上利用统计回归模型开展光学遥感悬浮物反演。计算公式为:
(1)
ρi=GainDNi+Bias,
(2)
式中:ρR和ρNIR分别为GF-1的红光波段和近红外波段反射率;Gain和Bias分别为增益和偏差。
2.2 微波遥感悬浮物水体提取
根据雷达工作原理,自然界大多数地物均可以视为粗糙程度不同的粗糙表面,在雷达上表现为地物的后向散射回波强度,图像上呈现出不同的灰度值,常用后向散射截面积σ或后向散射系数σ0来表达,其公式为:
σ0=f(λ,θ,P,φ,ε,Γ1,Γ2,V),
(3)
式中:λ为波长;θ为入射角;Ρ为极化方式;φ为方位角;ε为复介电常数;Γ1为表面粗糙度;Γ2为次表面粗糙度;V为体散射系数。
1)降噪处理(多视与滤波)。斑点噪声是SAR系统的固有缺陷,对SAR图像在实际应用过程中的目标识别、信息提取和分类等产生了严重影响和干扰。地距分辨率是指方位向和距离向相同的地面分辨率。为了得到地距分辨率同时减少SAR图像的噪声干扰,需要对原始SAR图像进行多视和滤波处理。计算公式为:
(4)
式中:Rgrr为地距分辨率;r为斜距分辨率。由于距离分辨率随入射角的变化而变化,多视处理尽管提升了数据的辐射分辨率,但降低了SAR数据的空间分辨率。
SAR滤波的方法有多种,且均形成了较为成熟的算法,比如SIGMA滤波[34-35]、LEE滤波[36-37]、Gamma-map 滤波[38]和小波分析[39-40]等。本文采用Gamma-map 滤波算法,对研究区内GF-3 SAR图像进行滤波处理。
2)SAR图像水体提取。研究表明,Cloude-Pottier 算法[41]是当前一种极为有效的极化信息提取方法。根据特征向量原理,利用Cloude-Pottier 分解算法可得到极化熵Hpe、散射角α和各向异性度或反熵A这3个特征参数值[42-43],其计算公式分别为:
(5)
α=P1α1+P2α2+P3α3,
(6)
(7)
(8)
式中:αi为第i个散射机制类型;Pi为第i个散射机制发生概率;χi为极化相干矩阵的特征值。
基于VH+VV增强后向散射强度图反映出的水体悬浮物浓度微弱信息,再利用已有现状海岸线进行海陆分割,提取目标水体的基础上,采用Hpe-α对目标水体进行空间重分类[44],最终获取了目标海域悬浮物浓度灰度图。
3 结果与分析
3.1 回归模型建立
将2019年9月实测的15组采样数据按悬浮物浓度值大小进行重排并编号,偶数序号(7组数据)分为一组用于建模; 奇数序号(8组数据)分为另一组进行精度验证。利用本文方法将获得的等效光谱反射率作为自变量,实测悬浮物浓度作为因变量进行回归分析。对比发现,三次多项式拟合效果最好(图3)。图3(a)为基于GF-1C光学遥感数据与实测悬浮物浓度建立的回归模型,相关系数R2为0.88,图3(b)为GF-3微波遥感数据与实测悬浮物浓度建立的回归模型,其相关系数R2相对偏低,仅为0.61。
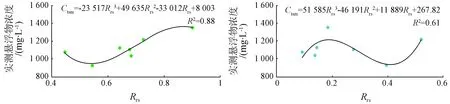

(a) 光学遥感拟合三次多项式 (b) 微波遥感拟合三次多项式
3.2 模型验证
为了检验反演模型的精确度,采用均方根误差Δrmse和平均相对误差Δmrpe这2个评价指标分别对已建立的2种回归模型进行评价[14, 20],其数学表达式分别为:
(9)
(10)
式中:xr,i为第i点悬浮物浓度反演值;xm,i为第i点悬浮物浓度测量值。
基于已建立的评价指标,将2种反演模型分析得到的悬浮物浓度与另外8组采样点实测数据进行精度验证与评估,如表3所示。精度结果表明,GF-1C悬浮物反演精度(均方根误差为130.25 mg/L,平均相对误差为9.65%)明显好于GF-3悬浮物反演结果(均方根误差为230.87 mg/L,平均相对误差高达15.13%)。由于与10号验证点对应的GF-3反演值出现异常,原始数据发现该处存在坏点,故该异常点在对GF-3反演悬浮物精度评价时不参与验证。
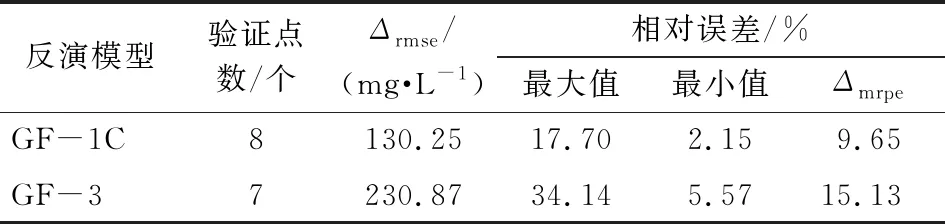
表3 反演模型精度验证
3.3 结果分析
3.3.1 研究区悬浮物分布规律
根据已建立的悬浮物反演理论模型,分别对研究区内2种数据源的悬浮物分布进行了反演。图4结果表明,2种方法反演出的结果具有高度的相似性和一致性: 茅尾海内海及入海口两侧悬浮物浓度总体较高,均超过1 000 mg/L,其分布规律呈现由东北向西南依次递减。结合研究区同季节历史资料[45]分析其原因: 在茅尾海内海上游3条主要河流每年向其注入泥沙量高达60万t,而在连接外海通道处分布着大量的天然岛屿和人工养殖蚝排蚝桩,严重阻碍了内海水体与北部湾海域的水体交换; 而在茅尾海入海口,悬浮物浓度分布表现为两侧偏高,中间偏低,原因在于入海口中部海域每年都进行人工航道清淤,但两侧人为活动和船只进出对水体扰动频繁,泥沙沉积过程和海洋动力作用如洋流、潮汐等在该区域的影响微弱。
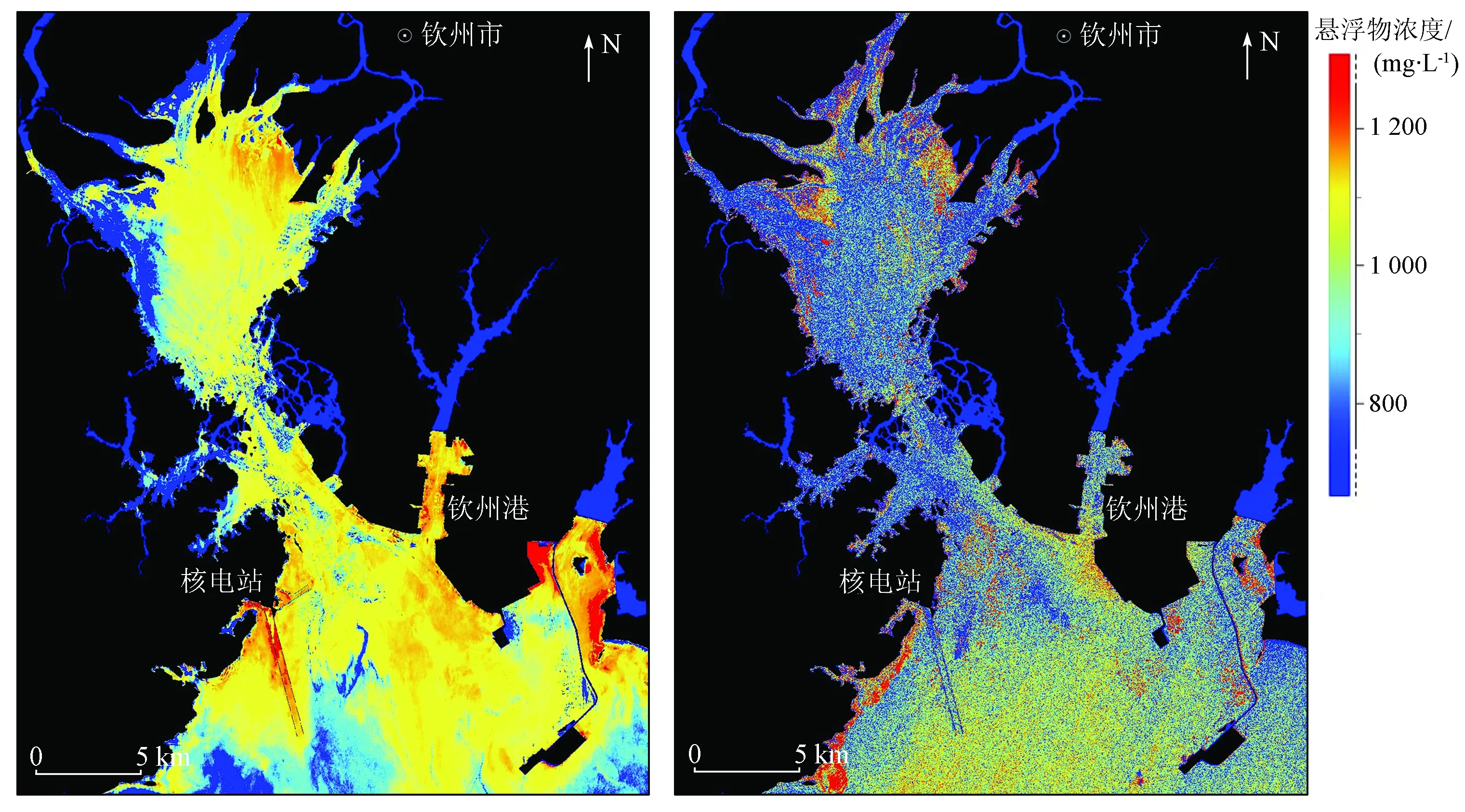

(a) 光学遥感提取结果 (b) 微波遥感提取结果
3.3.2 反演结果对比
根据反演结果,将悬浮物浓度进一步划分为3个区间: <1 100 mg/L,[1 100,1 200) mg/L,≥1 200 mg/L,分别代表悬浮物浓度低、中、高3个等级,再将实测点分布与悬浮物浓度等级区间进行相对位置关系讨论,如图5所示。
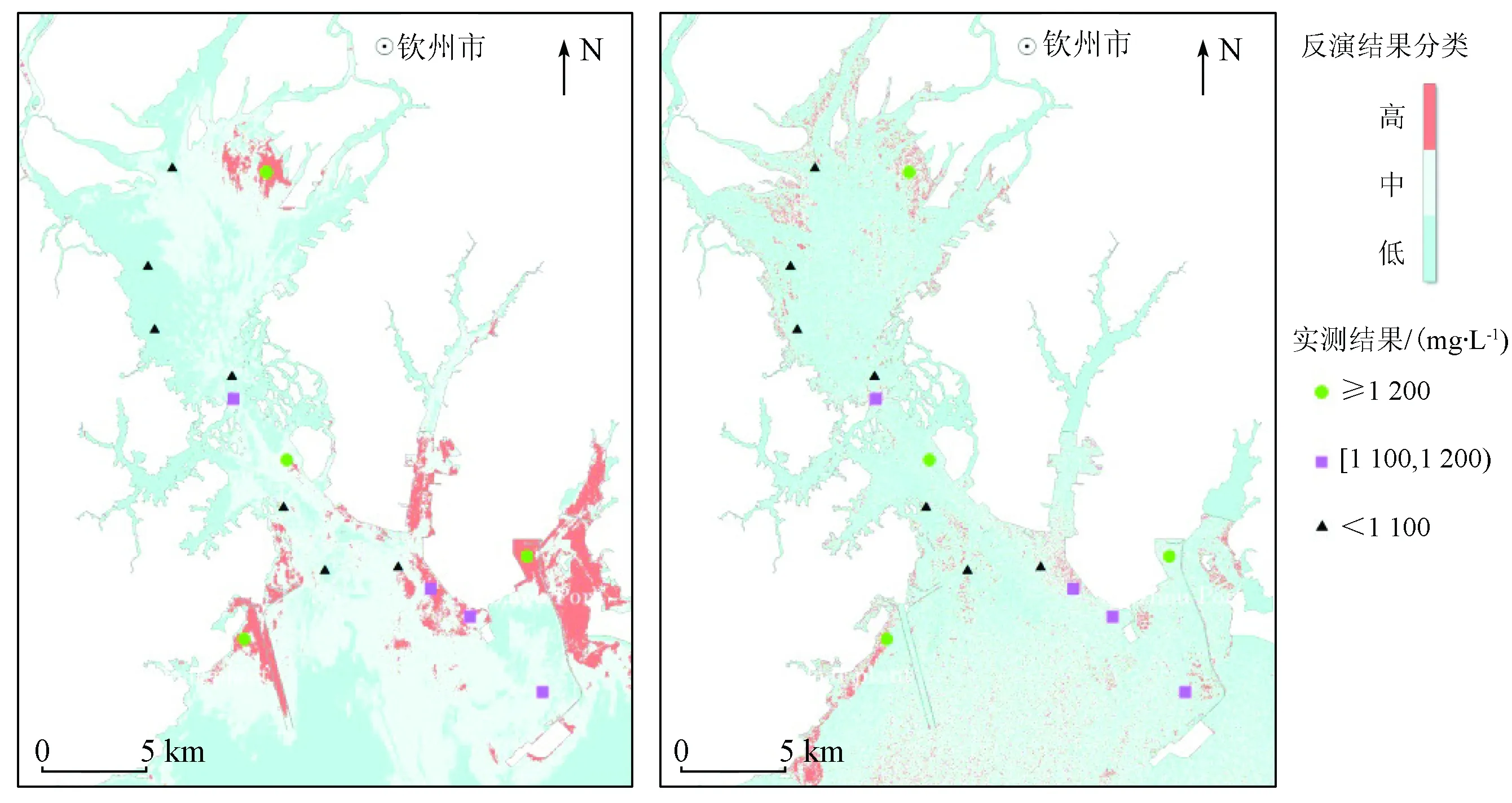
(a) 光学遥感结果对比 (b) 微波遥感结果对比
从精度评价结果看,研究区悬浮物浓度光学遥感反演结果精度(90.35%)明显高于微波遥感反演结果(84.87%),表明光学遥感反演结果要明显好于微波遥感反演结果。
1)从反演效果(图4)看,光学遥感反演结果灰度值过渡均匀,噪声点较少,效果明显好于微波遥感反演结果。
2)从反演结果分区和实测点相对位置(图5)看,光学遥感反演结果高值区和低值区与对应的实测数据完全吻合,仅在悬浮物浓度中值区,存在1处错误; 而微波遥感反演结果各个浓度分区与实测点均存在偏差,其中反演结果中值区和低值区各有1处错误,而在高值区有2处错误。
3)从取样时间和卫星数据获取时间节点看,由于不同传感器对同一区域数据获取时间以及野外取样时间三者无法保证高度一致,光学遥感反演结果精度要高于微波遥感反演结果,这与取样时间和光学遥感影像获取时间间隔(6~8 d)要小于和微波影像获取时间间隔(14~16 d)存在一定的相关性。
4 结论
近海及海湾地区悬浮物浓度的分布对于海岸带综合地质研究和生态环境保护具有重要的意义。利用遥感技术能够快速准确地反演其分布特征,本文利用2种不同的遥感数据源,采用不同的提取算法,并结合同期实地采样数据,准确地反演了茅尾海及其入海口悬浮物的分布。从技术方法看,2种手段均能准确地反演茅尾海悬浮物的分布特征,且反演结果表现出了高度的一致性; 从反演结果看,光学遥感反演结果要优于微波遥感反演结果,但微波遥感反演突破了光学遥感反演诸多的干扰因素,是光学遥感反演的有力技术补充。
另外,需要指出的是,由于野外取样数据有限,反演结果的准确性需要更多野外采样数据进行实验验证。
猜你喜欢
化工管理(2022年14期)2022-12-02
中等数学(2022年5期)2022-08-29
航天返回与遥感(2022年2期)2022-05-12
能源工程(2021年6期)2022-01-06
成都信息工程大学学报(2021年5期)2021-12-30
空间科学学报(2021年4期)2021-08-30
区域治理(2021年7期)2021-01-02
中等数学(2020年2期)2020-08-24
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02