岩溶洞穴多源点云数据的获取及融合方法
2022-03-25 04:45夏永华杨明龙龙丽娟
软件导刊 2022年3期
黄 德,夏永华,杨明龙,龙丽娟
(1.昆明理工大学国土资源工程学院;2.云南省高校高原山区空间信息测绘技术应用工程研究中心,云南昆明 650093)
0 引言
在岩溶洞穴的旅游开发中,获取完整的岩溶洞穴内部三维空间信息是前提[1]。运用三维激光扫描技术能快速获取被测物表面的三维点云数据[2],而摄影测量技术通过对获取的影像数据进行处理,也能得到测量对象的三维点云数据[3-5],这为溶洞内三维空间信息的获取和表达提供了有效方法。但是,三维激光扫描技术和摄影测量技术都无法获取被遮挡区域的三维空间信息,而且溶洞内复杂的空间构造极易形成遮挡,如果采用单一数据获取手段采集点云数据,往往存在较大的数据缺失,会给工程设计造成不利影响。
为了尽可能完整地获取到溶洞三维点云数据,本文以地面架站式三维激光扫描仪为主要的数据获取手段,以背包式三维激光扫描仪和近景摄影测量技术作为补充进行多源数据获取。在数据预处理时统一了不同数据采集方式获取点云数据的坐标系,通过改进的ICP 算法[6]进行多源点云数据的精细匹配融合。实现岩溶洞穴多源点云数据的采集、处理和融合,为溶洞的旅游开放设计提供了有效的数据支撑,也为复杂地下空间的多源点云数据采集和处理提供了参考。
1 相关研究
本文主要研究岩溶洞穴多源点云数据的获取及融合。对于岩溶洞穴点云数据的采集和处理,已经有相关研究,如:何林等[7]将三维激光扫描技术运用于大型溶洞扫描,并对采集数据进行拼接和去噪处理,取得了较好的扫描拼接精度;刘兴权等[8]采用三维激光扫描技术对溶洞进行探测,为公路的设计、施工和运营阶段的安全提供了直观依据;何原荣等[9]将三维激光扫描技术运用于溶洞建模与测量,极大降低了数据采集和建模的时间成本和人工成本,提高了生产实践效率;丁朋等[10]利用自主研制的激光扫描仪,对溶洞进行扫描和三维建模,计算出溶洞的空间展布,取得了良好的应用效果;张庆浩[11]基于三维激光扫描技术进行复杂溶洞的三维建模与安全分析;骆林[12]对无标志点溶洞三维激光点云数据拼接进行研究,取得了较好的拼接效果;高莎[13]对溶洞点云的数据配准与滤波处理技术进行深入研究,推动了溶洞点云数据的处理和运用。
以上研究多采用单一的数据采集方式获取点云数据,注重于单一来源点云数据处理。但在实际的数据采集过程中,洞内结构复杂,特别是对于洞内水面覆盖较多的溶洞,数据采集更加困难。采用单一数据采集手段获取的点云数据,数据缺失较为严重。
针对单一数据采集手段无法获取完整数据的问题,许多研究提出了多源数据融合方法,如:徐光禹等[14]将地面激光点云与空地影像相结合对古建筑进行三维重建,取得了较好的三维重建效果;谢云鹏等[15]运用无人机倾斜摄影技术与地面激光雷达技术进行融合建模,有效提升了建模精度,提高了城市三维建模效率;田鸽等[16]则将多源数据融合的三维实景建模技术运用于土地整治,提高了土地整治效率;罗秋等[17]运用多源点云数据融合进行文物三维建模,取得了较好的三维重建效果。
目前,多源点云数据融合建模的研究对象多为地上构筑物,其数据采集条件较好,而且多源点云数据多为地面三维激光扫描仪与摄影测量获取的数据。目前,针对自然地下空间构筑物的多源点云数据采集及融合相关研究还较少,同时关于背包式三维激光扫描仪点云数据获取及处理相关研究也还有待丰富。本文以岩溶洞穴这种典型的自然地下空间构筑物为研究对象,采用地面架站式三维激光扫描仪、背包式三维激光扫描仪和摄影测量技术进行数据采集,其数据采集难度大,采集手段更为丰富。采用改进的ICP 算法也能取得更好的融合效果。
2 技术路线
本文采用的技术路线如图1 所示,踏勘时在洞口两端分别布设了3 个GPS 控制点,用于统一不同数据采集方法获取点云数据的坐标系和尺度。
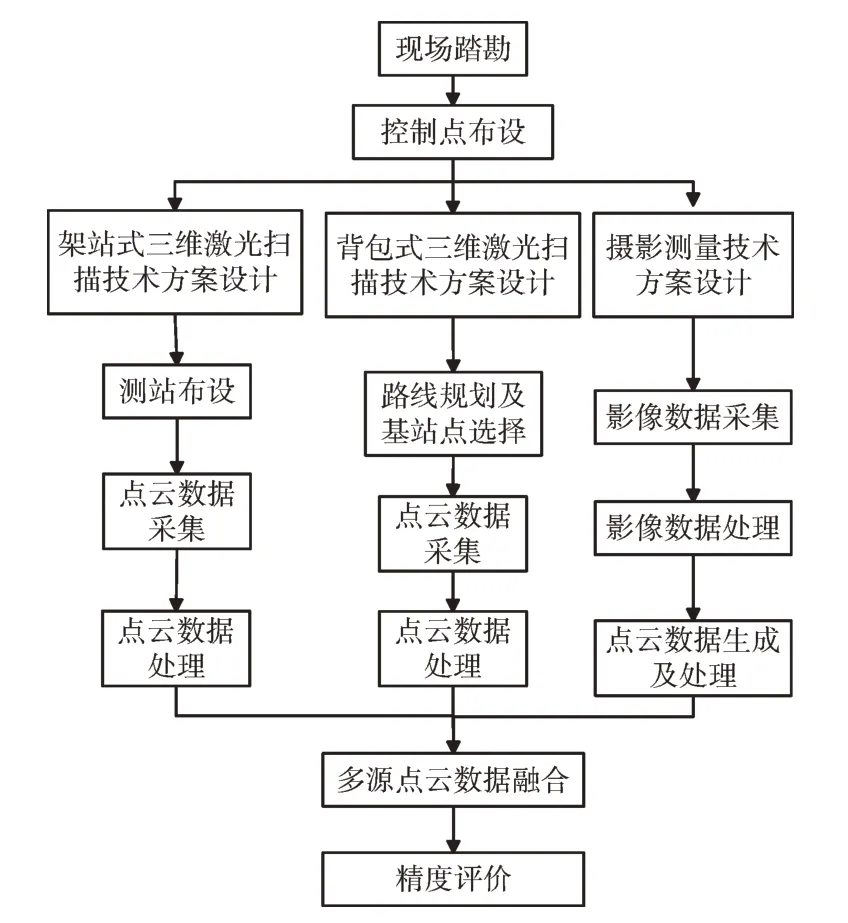
Fig.1 Technology roadmap图1 技术路线图
3 数据采集
3.1 实验区概况
以云南某中型溶洞为实验区,洞体长800m,洞底多为水面,只有小部分区域无水覆盖。洞内较为潮湿,钟乳石分布较为密集,容易形成遮挡。
要想让学生喜欢识字,首先得让学生没有心理负担,敢于在课堂上畅所欲言,因此创设一种民主平等和谐的师生关系是至关重要的。以往的教学中,教师总处于一种凌驾于学生之上的特殊位置,动辄发号施令,指挥学生,这无疑会压制学生的学习主动性,在课堂上造成“这里的黎明静悄悄”的局面。在识字课上,教师要尊重学生的个体差异和独特体验,选择自己喜欢的方式识字。记字形是识字的一个难点,如:“你有什么好办法记住这位生字朋友的样子?”把生字当成朋友,一下子消除了学生对记字的抵触情绪;让学生自己想办法,激发了他们参与的欲望。
3.2 地面架站式三维激光扫描仪数据采集
采用Maptek I-Site 8200 三维激光扫描仪获取点云数据,首先将仪器架设在洞口布设的控制点上进行扫描。因为洞内多为水面,为了有效获取点云数据,将仪器固定在船上,再将船体固定进行数据采集,如图2(a)所示。

Fig.2 Data acquisition of 3D laser scanner图2 三维激光扫描仪数据获取
背包式三维激光扫描仪采用的设备系统为徕卡背包式三维激光扫描系统(Leica Pegasus:Backpack)。数据采集前在测区附近架设了两台GNSS 静态基站,用于轨迹的后差分处理。运用全站仪测出静态基站架设点的坐标,便于与其它采集方式获取的点云一起统一到同一坐标系下。数据采集时让人背负仪器站在船上,通过船体沿事先设计的路线运动并完成数据采集,如图2(b)所示。
摄影测量的数据获取,采用大疆精灵4Pro 无人机和佳能EOS6D2 相机相结合进行小区域的影像数据采集。采集的部分影像数据如图3 所示。

Fig.3 Part of the image data collected by photogrammetry图3 摄影测量采集的部分影像数据
4 数据处理
4.1 三维激光点云数据处理
(1)点云数据拼接。对于地面架站式三维激光扫描仪获取点云数据的拼接,先对GPS 控制点上架站获取的点云数据进行测站设置和拼接,使得洞口两端测站获取的点云数据与布设的控制点坐标处于同一坐标系下;再基于洞口点云将洞内采集的点云进行逐站拼接配准;最终采用全局校正,实现闭合条件下各站点云的误差分配,使得洞内采集的各站点云与两端洞口点云精确拼接,拼接后的点云如图4 所示(彩图扫OSID 码可见,下同)。

Fig.4 Point cloud acquisition by ground-mounted 3D laser scanner图4 地面架站式三维激光扫描仪获取点云
背包式三维激光扫描仪的数据拼接采用仪器配套的数据后处理软件进行。首先,使用Inertial Explorer 软件进行轨迹解算,将GNSS 获得的观测数据与IMU 传感器获得的6 自由度角速度计加速度信息进行融合,得到背包运动过程中的空间位置和姿态信息[18];然后,使用Pegasus Manager 软件进行SLAM 解算,目的是利用IMU 惯性测量单元辅助SLAM 去除因运动引起的点云畸变,在完成SLAM 解算生成轨迹文件后,将轨迹文件和仪器采集的原始点云进行融合解算,完成点云的拼接和输出;最后,在Leica Infinity软件中运用全站仪测出的基站点坐标求取转换参数实现坐标转换。拼接和坐标转换后的点云如图5 所示。

Fig.5 Point cloud data obtained by backpack-type 3D laser scanner图5 背包式三维激光扫描仪获取点云数据
(2)点云数据去噪。由于激光折射会在水面下形成许多噪点,同时采集到的洞内船只和前期活动留下的一些构筑物点云都会对后期的点云数据融合造成不良影响,需要对这些噪点进行去除。在Maptek I-site studio 软件中采用人工交互方式,分别对地面架站式三维激光扫描仪和背包式三维激光扫描仪获取的点云进行去噪。去噪前后的点云如图6 和图7 所示。

Fig.6 Comparison of laser point cloud of ground-mounted scanner before and after denoising图6 地面架站式扫描仪激光点云去噪前后对比
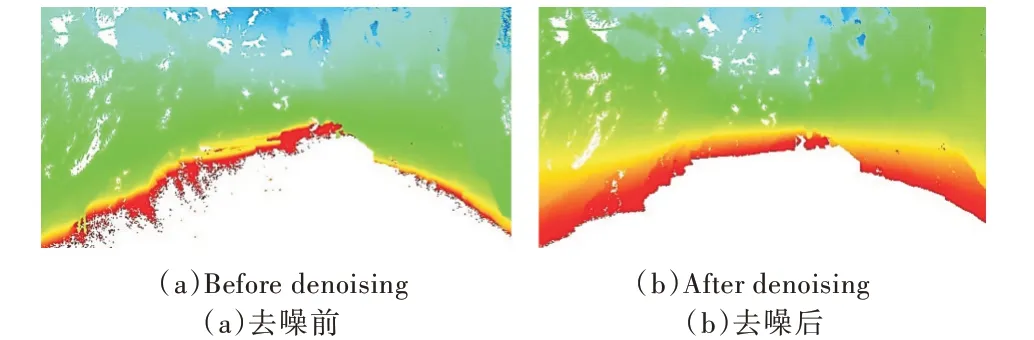
Fig.7 Comparison of laser point cloud of backpack scanner before and after denoising图7 背包式扫描仪激光点云点云去噪前后对比
(3)点云数据过滤。由于进行了多站的数据采集,采集重叠区域和距仪器较近区域点云密度较大,造成了一定的数据冗余,因此需要对过密点云进行过滤。本文采用距离过滤方法,对点云进行过滤。过滤前后的点云如图8 所示。
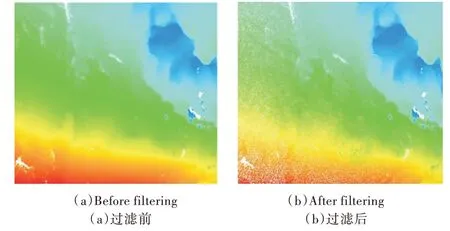
Fig.8 Comparison before and after point cloud filtering图8 点云过滤前后对比
4.2 摄影测量数据处理

Fig.9 Partial stalactite point cloud generated by photogrammetry technology图9 摄影测量技术生成部分钟乳石点云
5 多源点云数据融合
点云融合主要是将不同数据源的点云数据融合成一个点云数据[20]。本文中,不同数据获取方式得到的点云在预处理阶段都进行了坐标系和尺度的统一。但由于洞内不便布设控制点,会导致统一坐标系下的多源点云数据处于不同位置,因此还需对多源点云数据进行精细匹配融合。
本文采用改进ICP 算法对3 种数据采集方式获得的点云数据作进一步融合,在传统ICP 算法的基础上加入旋转角约束和动态迭代系数[6],对于两个待融合的点云Pgt和Ps,算法实现过程如下:
首先计算点云的刚体变换初值:

R0为初始旋转矩阵,t0为初始平移矢量。估计旋转角边界:

θxb、θyb、θzb为旋转角的均值;Δθx、Δθy、Δθz是旋转角的偏差。用ICP 算法建立待融合的两组点云的相关性,并计算旋转矩阵Rk+1和平移矢量tk+1:

计算qk+1的相邻两次迭代的变化量Δqk+1。利用式(4)[6]计算Psk+1,得到新的刚体变换(Rk+1,tk+1)。

通过求取两次均方根误差(RMSE)与设定阈值进行比较,使得融合精度达到阈值要求后停止迭代,RMSE的定义如式(5)[6]。

在实验过程中,先将全部的点云数据格式转换为“.obj”格式。以地面架站式三维激光扫描仪获取的数据作为基准,分别将背包式三维激光扫描仪和摄影测量获取的点云与之融合。图10 展示了数据融合结果,图中红色为架站式三维激光扫描采集点云,黄色为背包式三维激光扫描仪获取点云。从图10(a)中可以看出,数据总体上能够实现较好的融合效果;从图10(b)中可以看出,两种数据融合后能够有效补充单一数据采集方式造成的一些数据缺失。
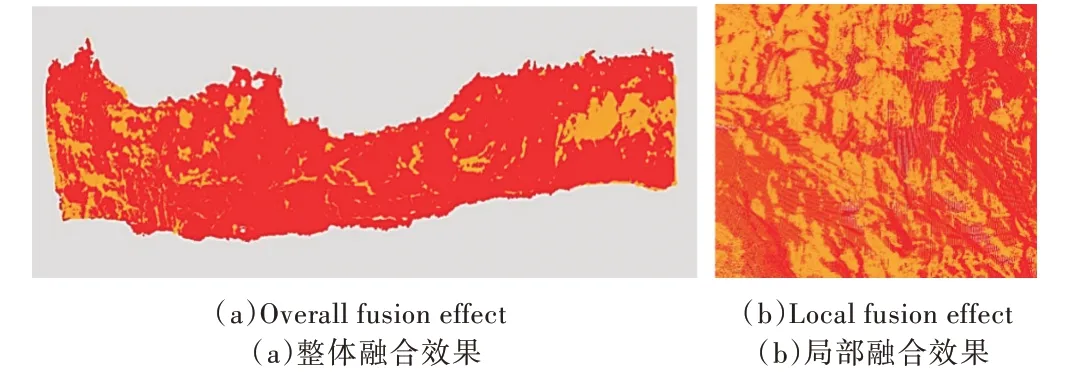
Fig.10 Fusion effect of laser point cloud of ground-mounted scanner and backpack scanner图10 地面架站式扫描仪与背包式扫描仪激光点云的融合效果
在图11 中,(a)和(b)分别代表运用摄影测量技术和地面架站式三维激光扫描仪获取的点云数据,(c)展示了两种数据融合后的结果。可以看出,两种数据的融合效果较好。
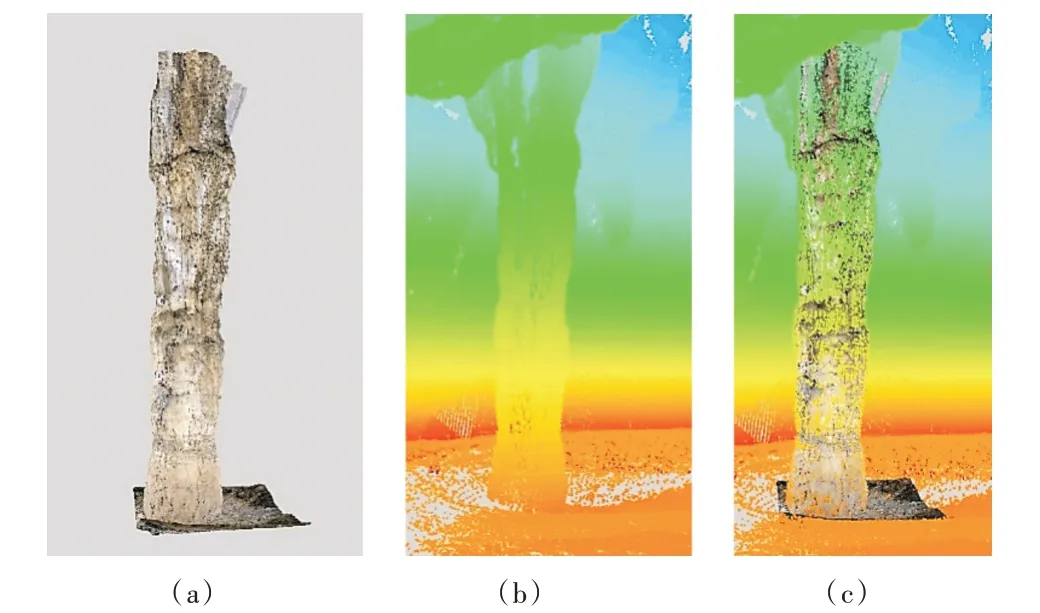
Fig.11 Fusion effect of laser point cloud and photogrammetric point cloud of the ground-mounted scanner图11 地面架站式扫描仪激光点云与摄影测量点云融合效果
为了评定地面架站式三维激光扫描仪获取点云与背包式三维激光扫描仪和摄影测量技术获取点云的融合精度,在配准后的点云上分别采集相应的特征点,对融合效果进行精度评估,运用式(6)求取三维坐标差ΔX、ΔY、ΔZ。
用式(7)分别求取平面点位中误差和高程中误差m。

为了评价地面架站式三维激光扫描仪和背包式三维激光扫描仪的融合精度,本文从融合点云中选取了10 个特征点,求取其三维坐标差,如表1 所示。
可以看出,对于地面架站式激光点云和背包式激光点云的融合,X的最大误差值为-3.7cm,最小误差值为1.5cm;Y的最大误差值为-3.9cm,最小误差值为0.9cm;Z的最大误差值为-3.2cm,最小误差值为-1cm;利用式(7)计算平面点位中误差为4.187cm,高程中误差为2.432cm。
为了评估地面架站式三维激光扫描仪与摄影测量技术获取点云数据的融合精度,从融合区域内选取8 个特征点,通过式(6)计算三维坐标差,结果如表2 所示。
可以看出,对于地面架站式激光点云和摄影测量点云,X的最大误差值为-4.9cm,最小误差值为2.5 cm;Y的最大误差值为5.5 cm,最小误差值为-2.6 cm;Z的最大误差值为-5.1 cm,最小误差值为1.8cm;利用式(7)计算平面点位中误差为6.263cm,高程中误差为4.225cm。
从以上数据可知,采用改进的ICP 算法对3 种点云数据的融合效果较好。其中,地面架站式激光点云和背包式激光点云的融合效果优于与摄影测量点云的融合效果。其原因在于,洞内多为水面摄影测量像控点而无法布设,只能从配准后的地面架站式激光点云中选取特征点坐标作为像控点对影像进行校正;同时摄影测量的精度相较于激光扫描的精度也较低。
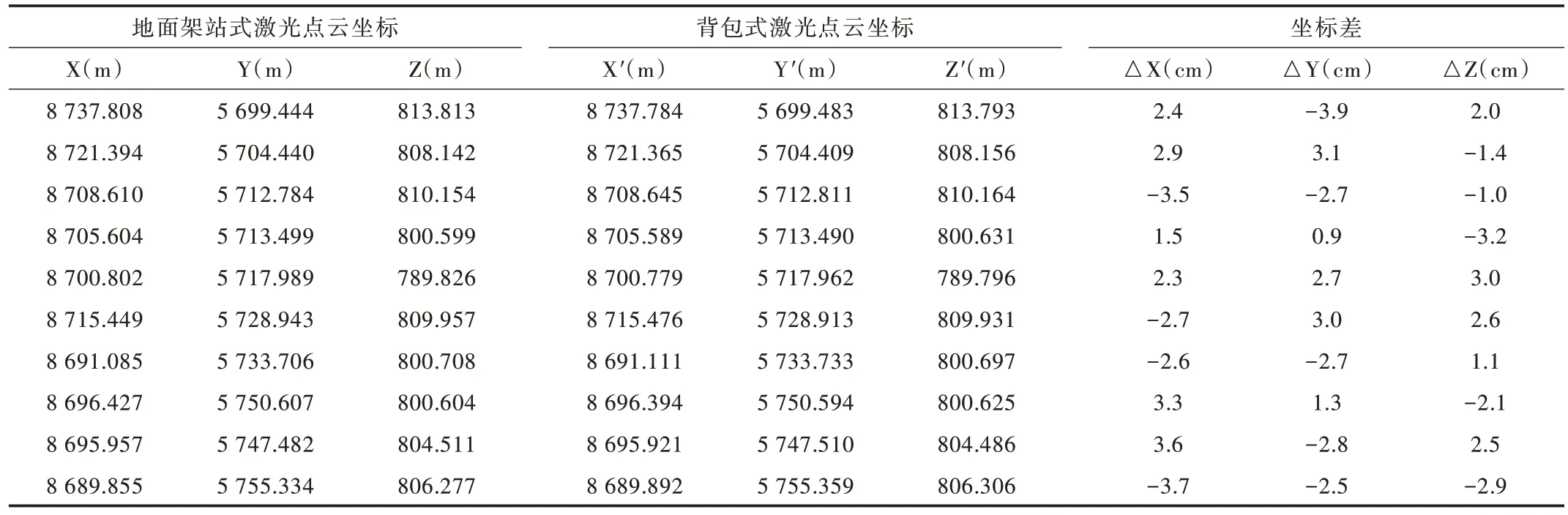
Table 1 Laser point cloud accuracy checklist for ground station scanner and backpack scanner表1 地面架站式扫描仪和背包式扫描仪激光点云精度检查

Table 2 Accuracy checklist of laser point cloud and photogrammetric point cloud of ground-mounted scanner表2 地面架站式扫描仪激光点云和摄影测量点云精度检查
6 结语
利用地面架站式三维激光扫描仪、背包式三维激光扫描仪和摄影测量技术获取岩溶洞穴内的多源点云数据,通过点云数据融合算法实现多源点云数据的融合。通过该方法可以获取到溶洞内更加完整的点云数据,为岩溶洞穴的旅游开发提供了数据支撑,同时也为复杂空间中点云数据的获取方法提供了参考。虽然多源点云数据采集和融合可在一定程度上减少单一获取方式造成的数据缺失,但是想要获取完整的溶洞点云数还是存在一定困难。下一步工作还需探索有效的缺失数据补全方法,对缺失数据进行补全。
猜你喜欢
农民文摘(2019年11期)2019-11-15
外语学刊(2017年3期)2017-12-07
摄影之友(影像视觉)(2017年10期)2017-11-07
作文周刊·小学一年级版(2016年42期)2017-06-06
童话世界(2017年11期)2017-05-17
陕西理工大学学报(社会科学版)(2017年1期)2017-03-02
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
现代营销·经营版(2013年5期)2013-05-14
警察技术(2013年1期)2013-03-20