一种对中定位夹具的机构设计
2022-03-25 04:45伞红军李鹏宇陈久朋徐洋洋
软件导刊 2022年3期
伞红军,陈 佳,李鹏宇,陈久朋,徐洋洋
(昆明理工大学 机电工程学院,云南 昆明 650500)
0 引言
近年来,随着生活水平的提高,人们不断追求更好的视觉体验。其中,液晶显示器(LCD)是基于液晶光电效应的显示器件,目前已逐渐取代传统笨重的CRT 显示器,成为主流显示设备[1]。在其生产装配过程中,显示器定位夹具贯穿整个装配过程,对于显示器的自动化装配生产起到重要作用。采用对中定位方法对传统生产装配线上的定位夹具进行优化设计,不仅能提高生产装配的自动化程度[2],缩短生产时间,而且能提高产量[3],大幅降低生产成本。
1 相关研究
在19 世纪车床问世时就已带有简易的卡盘,用于对工件进行夹紧定位,因此早期的夹具只是机床的延伸物和附件。随着车、钻、刨、铣、磨等各类金属切削机床的出现,虎钳之类的通用夹具产生。早期的机床由于几何精度及运动精度低、功能简单,因此夹具对机床加工产业的发展起到了重要的促进作用。
20 世纪中叶,为适应时代发展以及产品大批量生产的新模式,由前苏联米塔洛范诺夫工程师创造的成组技术迅速在全球推广应用,之后该技术也成功运用于夹具中。在这一时期,夹具系统逐步完善,形成了通用夹具、成组夹具、组合夹具和专用夹具等子系统。
进入21 世纪以来,我国的液晶显示器产业发展较快,规模不断扩大,国产化水平不断提高。随着我国机械加工制造业的持续发展,各种机械设备也被广泛应用于液晶显示器的装配生产线中[3]。目前液晶显示器的生产装配尚无全自动生产线,主要依靠人工配合某些设备来完成,不仅极大地浪费了人力资源,也降低了产品质量。为提高生产效率,以满足不断扩大的市场需求,必须改进传统的液晶显示器生产装配方式,实现自动化生产装配。
基于国内庞大的市场及消费潜能,我国在液晶显示行业的地位日益凸显[4]。夹具设计对于显示器在装配过程中的夹紧定位起到了决定性作用,对于中定位夹具作为机械生产加工过程中的辅助定位设备,对提高零部件的定位精度具有重要意义[5-6]。本文在一种自主设计的对中定位夹具基础上,针对设计的对中定位夹具原理机构进行数学建模,确定各构件具体尺寸。通过MATLAB 求解约束方程,得到最优尺寸参数,从而为实际生产装配提供一定的理论基础。
2 液晶显示器定位过程
液晶显示器在倍速链上流动示意图如图1 所示。LCD先放置在托盘上实现粗定位,然后托盘沿着LCD的显示面方向移动,其宽度方向受托盘两侧的隔挡凸台限制。当显示器随托盘移动到指定位置,然后由定位夹具准确定位并进行夹紧,以便于作下一步组装和检查[7]。

Fig.1 Motion diagram of the display on the multiply chain图1 液晶显示器在倍速链上流动示意图
对显示器定位过程相关夹具进行优化设计,主要针对以下4 种型号的显示器:
(1)215A 型。这一款LCD 是A 型号21 寸,对中定位为504mm,宽度为305mm,长度为504mm,如图2 所示。

Fig.2 215A display 3D modeling schematic图2 215A 型显示器三维建模示意图
(2)215P 型。这一款LCD 是P 型号21 寸,对中定位为504mm,宽度为304mm,长度为504mm。
(3)238A 型。这一款LCD 是Ⅰ型号21 寸,对中定位为564mm,宽度为322mm,长度为564mm。
(4)240A 型。这一款LCD 是Ⅱ型号21 寸,对中定位为504mm,宽度为305mm,长度为504mm。
3 对中定位夹具设计及原理
由上文可知,夹具针对4 种型号的显示器需要对中定位的尺寸在504~566mm 之间,且同在一个生产线上时,因为要对应不同型号的LCD 进行装配与生产[8-9],其对LCD进行重定位时,定位标准会有所改变,因而重定位的精度误差会不断累积增大。为解决上述问题,本文设计的对中定位夹具结构如图3 所示。

Fig.3 Tructural drawing of centering and positioning fixture图3 对中定位夹具结构
该机构中包含两个滑块1,其关于机构中心4 左右对称。铰链A、E 使滑块与连杆2 配合连接,铰链B、D 使曲柄3与连杆配合连接,滑块与导轨5 配合连接,并可以作直线运动。为了让滑块在运动过程中具有良好的稳定性以及平行度,让两组滑块与导轨平行进行安装。其原理图如图4所示。
由图4 可知,该对中定位夹具是由两个曲柄滑块机构组成的关于中心对称的机构[10-11],两个滑块可同时向中间位置靠拢,也可同时向外运动。由于LCD的对中定位是通过两个滑块链接夹持共同完成的,则平面内可夹持LCD的长度范围就是两滑块的距离范围。因为4 种型号LCD的尺寸已经确定,因此生产线中两个曲柄滑块的设计要能对上述4 种型号的LCD 完成夹持定位功能。
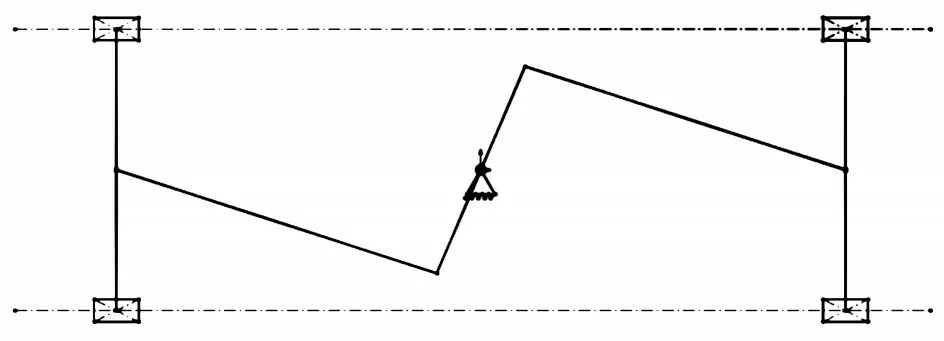
Fig.4 Schematic of centering fixture mechanism图4 对中夹具机构原理
3.1 数学模型建立
根据前文描述,为便于求解机构中每个杆件的参数,根据夹具原理建立数学模型,如图5 所示[12-15]。以机架和曲柄的连接点A0作为坐标原点,滑块的导轨运动方向作为坐标轴。点A 为杆AA0所在平面上的一个圆点,A0为圆心点。

Fig.5 Mathematical model of crank slider mechanism图5 曲柄滑块机构数学模型
连杆与滑块通过铰链连接,即连杆上的P 点。根据上述4 种型号LCD的尺寸,可得到滑块需要到达的坐标点为:P1(252,0),P2(282,0),P3(283,0)。滑块运动夹紧方向与三点坐标方向一致,由此可完成滑块关于对称中心左侧或右侧的数学建模[16-18]。
平面连杆机构在运动过程中,传动角不停地发生改变。为了让每个构件之间的力传递性能具有稳定性,需要其传动角度始终大于40°,与图5 机构位置相结合,连杆所在位置的角度应该大于135°。现令滑块经过点P1、P2、P3时,其连杆对应的位置分别为∑1、∑2、∑3,连杆所在刚体内矢量的角度分别为θ1=(140°)、θ2=(140°)、θ3=(165°),此时滑块的力学传递性能比较稳定。因此,滑块由位置P1→P2时,连杆转过的角度为θ12=θ2-θ1;由位置P1→P3时,连杆转过的角度为θ13=θ3-θ1。
3.2 连杆位置变化矩阵
通过对曲柄滑块机构建立的数学模型可得到连杆的偏角及位置坐标,由此可推得连杆位移变化矩阵。连杆位置由∑1 →∑2 时,连杆对应点由P1→P2,其位移矩阵如下:
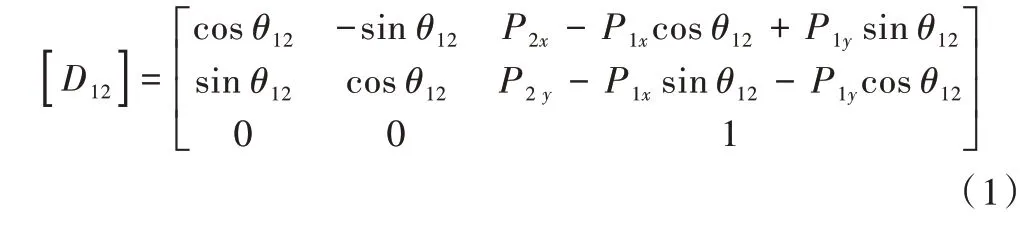
连杆由位置∑1 →∑3 时,对应点由P1→P3,其位移矩阵如下:

式(1)、式(2)所示的位移矩阵可对连杆由位置∑1 到达位置∑2 与∑3的位置转换进行数学表达。
3.3 平面连杆机构位置综合位移约束方程建立
假设当连杆处于位置∑1、∑2、∑3 时,圆点A 分别经过坐标A1(Ax1,Ay1)、A2(Ax2,Ay2)、A3(Ax3,Ay3)3 个点,且A0A长度固定不变,可得平面连杆机构位置方程如下[19-20]:

对式(3)方程组求解,可分别得到曲柄位置P1、P2、P3与连杆位置∑1、∑2、∑3。
3.4 位置方程求解与机构参数确定
在式(3)中,坐标A2(Ax2,Ay2)、A3(Ax3,Ay3)可通过位移矩阵与坐标A1(Ax1,Ay1)建立联系,关系式如下:

将原点坐标A0带入方程组,可得到简化的二元二次方程组。
MATLAB(Matrix Laboratory)是MathWorks 公司推出的用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言与交互式环境的商业数学软件,通过MATLAB 求解计算机构尺度综合流程如图6 所示。
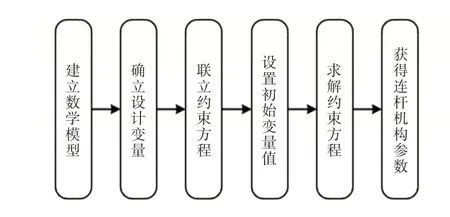
Fig.6 MATLAB solution flow图6 MATLAB 求解流程
将以上坐标参数带入式(4)、式(5)中,并在MATLAB中编写程序求解,即可得到A1坐标。连杆机构尺度综合MATLAB 求解程序如下:


通过上面程序,可得到A1的坐标,并且在A0、A1和P1的位置可通过勾股定理求得连杆位于位置∑1 时曲柄A0A1与连杆A1P1的参数,如表1 所示。

Table 1 The solution result of three position coordinate constraint equation based on MATLAB表1 基于MATLAB的三位置坐标约束方程求解结果
在设计机构时,为了简化其结构,可先对一侧机构进行设计,然后通过中心对称原则将另一边机构补足,即可得到所想要的机构模型。
根据所求参数对连杆在位置∑1 时的机构状态进行数学建模,如图7 所示。
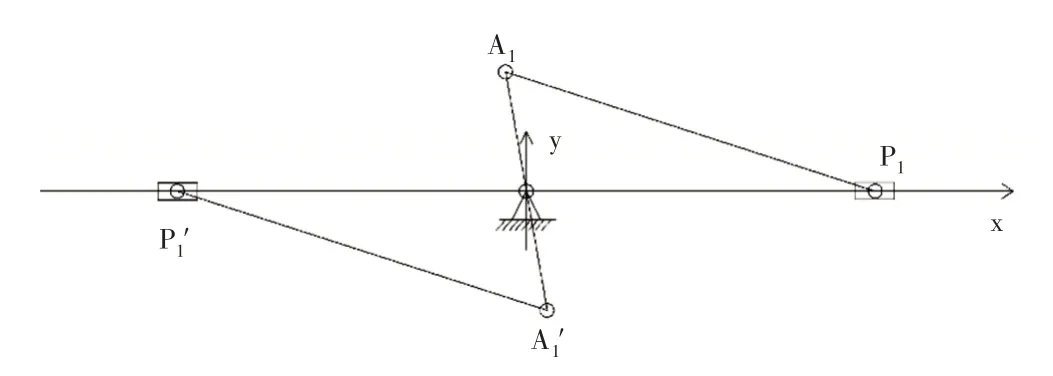
Fig.7 Principle mechanism of connecting rod at ∑1图7 连杆在∑1 时对应原理机构
图7 为连杆机构在位置∑1 时的姿态,该姿态满足滑块位于点P1的位置要求。然后当滑块经过点P2和P3时,对连杆在∑2 和∑3的位置参数进行求解。A2、A3的位置坐标可通过位移方程式(4)、式(5)求得,如表2 所示。

Table 2 The corresponding mechanism component parameters of the connecting rod at positions ∑2 and ∑3表2 连杆在位置∑2 与∑3 处对应机构构件参数
根据表2 参数,可对连杆位于∑2 和∑3 位置时的机构状态分别进行数学建模,如图8、图9 所示。
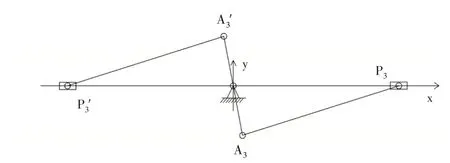
Fig.9 Corresponding mechanism state of the connecting rod at ∑3图9 连杆在∑3 时对应机构状态
通过MATLAB 求得对称曲柄连杆机构的曲柄长为85.604 7mm,连杆长为279.986 0mm。
4 结语
为了对4 种显示器型号的3 个长度尺寸进行对中夹紧定位,本文通过MATLAB 求解约束方程,得到对中定位夹具中对称曲柄连杆机构的曲柄长为85.604 7mm,连杆长为279.986 0mm,为实际生产装配提供了一定理论依据。但对连杆机构设计求解时,只进行了机构的尺度综合,而没有进行机构的型综合设计分析,今后可针对这一问题对该连杆机构继续进行优化设计。
猜你喜欢
数学物理学报(2021年6期)2021-12-21
机械工业标准化与质量(2021年10期)2021-11-19
机械工程师(2021年4期)2021-04-19
航天工业管理(2020年11期)2021-01-04
航天工业管理(2020年9期)2020-12-28
液晶与显示(2020年8期)2020-08-08
设备管理与维修(2019年22期)2019-12-19
机械研究与应用(2018年5期)2018-11-05
铁道通信信号(2016年8期)2016-06-01
液晶与显示(2015年1期)2015-02-28