结合局部信息活动轮廓模型的含噪图像分割方法
2022-03-25 04:45吕毅斌王樱子唐胜男武德安
软件导刊 2022年3期
黄 征,吕毅斌,王樱子,唐胜男,武德安
(1.昆明理工大学理学院;2.昆明理工大学 计算中心,云南 昆明 650500;3.电子科技大学 数学科学学院,四川 成都 611731)
0 引言
图像分割是将图像分成若干特定的、具有独特性质的区域并提取感兴趣目标的技术与过程[1]。近年来,活动轮廓模型[2]在图像分割领域得到了广泛应用,其通常通过预定义的能量函数区分图像区域,该函数包含图像的灰度和梯度信息。活动轮廓模型一般分为基于边缘的活动轮廓模型[3]和基于区域的活动轮廓模型[4]两种。基于边缘的活动轮廓模型主要通过图像梯度使轮廓曲线向目标边界发展,但不能处理弱边界图像,且对初始轮廓非常敏感[5];基于区域的活动轮廓模型使用图像区域信息(如灰度、纹理和形状特征)引导轮廓运动[6],在不依赖图像梯度信息的情况下,该模型可以克服前者存在的问题[7]。
基于区域的活动轮廓模型可大致分为基于全局区域的活动轮廓模型[8]、基于局部区域的活动轮廓模型[9]和基于混合区域的活动轮廓模型[10]3 类。Chan 和Vese[11]在Mumford-Shah 模 型的基础上提出了C-V(Chan-Vese)模型,是著名的基于全局区域的活动轮廓模型。由于仅使用全局图像信息,该模型无法分割灰度不均匀的图像[12]。之后很多学者在该模型的基础上针对不同待分割图像作出了改进。例如,Li 等[13]提出RSF(Region-Scalable Fitting)模型,该模型是典型的基于局部区域的活动轮廓模型,其通过尺度参数引入局部区域的灰度信息,因此可以精确分割灰度不均的图像,但由于能量函数非凸,若初始轮廓设置不当,会陷入局部极小值。随后,Zhang 等[14]提出局部图像拟合模型,但由于使用了固定参数并假设局部区域灰度均匀,因此无法成功分割严重灰度不均性以及噪声图像。为使活动轮廓模型能处理更多类型的图像,Wang 等[15]引入全局项、局部项和规则化项,提出的LCV(Local Chan-Vese)模型可以快速有效分割灰度不均的图像。该模型是典型的基于混合区域的活动轮廓模型,有效改善了初始轮廓和噪声的鲁棒性,但计算复杂度高,容易陷入局部极小值,不适用于严重灰度不均和复杂噪声图像。随后很多学者结合图像聚类统计信息对模型进行了改进[16-19],不再赘述。
传统活动轮廓模型均未在含噪灰度图像方面作出改进,基于此,本文针对噪声图像,构建一种结合局部信息的活动轮廓模型。首先提出一个结合局部信息的速度函数,使其根据图像局部灰度变化控制曲线的演化速度,提高模型分割效率;然后引入权重描述每个像素与拟合中心的相关性,充分考虑像素点灰度值与拟合中心的差异。为了自适应地调节模型的比例参数,引入自适应权重系数,根据曲线内外部灰度差异自适应调节权重,并针对噪声图像进行实验,对本文提出的模型与C-V 模型、LCV 模型和RSF模型进行比较,验证了本文模型的有效性。
1 相关研究
1.1 C-V 模型
C-V 模型是在Mumford-Shah 模型的基础上提出的一种基于全局信息的水平集模型,其利用轮廓曲线内外的灰度均值引导曲线停止在目标边缘。C-V 模型的能量函数构造为:


为保证活动轮廓演变过程中水平集函数的所有点均为趋于零的正值,对Dirac 函数和Heaviside 函数正则化,分别得到δε(x)和Hε(z),表示为:
固定φ(x),相对于c1和c2最小化ECV得到:
式中,c1和c2分别为轮廓内部和外部的灰度均值。固定c1和c2,相对于φ(x)最小化ECV得到变分水平集公式:

C-V 模型对轮廓初始化的鲁棒性较好,且具有获得较大收敛范围的能力,因此在图像分割领域应用广泛。但如果轮廓内外灰度不均,则常数c1和c2便不能准确描述轮廓内外的平均灰度,可能无法准确分割图像。
1.2 RSF 模型
RSF 模型是针对灰度不均图像提出的一种基于局部灰度信息的模型。该模型引入标准偏差为σ的高斯核函数Gσ,采用两个空间变化的平滑拟合函数f1(x)和f2(x)近似逼近轮廓两侧的局部灰度。RSF 模型的能量函数表示为:
固定水平集函数φ,相对于f1(x)和f2(x)最小化ERSF得到:

式中,f1(x)和f2(x)分别为轮廓内、外的局部灰度均值,*表示卷积。平滑拟合图像F[20]表示为:

固定f1(x)和f2(x),相对于φ最小化ERSF得到梯度下降流,表示为:
由于使用了局部区域信息,RSF 模型可以分割一些灰度不均的图像。但当初始轮廓选择不合适时,很容易陷入全局极小值,表明RSF 模型对初始轮廓敏感,对高噪声图像的分割效果亦较差。
2 新模型建立
2.1 结合局部信息的速度函数
通过引入拟合图像与原图像的灰度差异构造速度函数,新的基于局部信息的速度函数表示为:

利用|I-F|统计拟合图像与原图像的灰度差异,当演化曲线接近目标边界时,拟合图像灰度接近原图像灰度,即|I-F|减小,相应的曲线演化速度V减小。当演化曲线远离目标边界时,拟合图像灰度与原图像灰度差异大,即|I-F|增大,相应的曲线演化速度V增大。选用指数函数是为了使拟合图像灰度接近原图像灰度时,速度提升快。相应的,当拟合图像灰度与原图像灰度偏差大时,速度降低慢。
2.2 改进拟合项构造
新模型的拟合项在C-V 模型的基础上进行改进。由于拟合图像近似于原图像,同时还可以减少噪声干扰,增强边缘特征,因此将拟合项中的原图像I改为拟合图像F。传统C-V 模型计算中认为每个像素点对拟合中心的影响是相同的,这样会导致分割结果不准确[21]。因此,本文引入权重m1和m2描述每个像素与拟合中心的相关性[22],在原有拟合中心c1和c2的基础上增加权重m1和m2,将其改为c11和c22,表示为:

式中,m1和m2分别为c11和c22的权重,表示为:
当区域像素点灰度值I与拟合中心c1越相近时,|I-c1|的值越小,|I-c2|的值越大,则权值m1越大,该像素点对目标区域拟合中心计算的贡献越明显。同理,当I与拟合中心c2越相近时,|I-c2|的值越小,|I-c1|的值越大,则权值m2越大,该像素点对背景区域拟合中心计算的贡献越明显。此外,噪声点与拟合中心灰度值相差越大,对应的权重会越小,通过加权平均计算得到的加权拟合中心越精确,可有效抑制噪声对分割结果的影响。
2.3 自适应权重系数
传统活动轮廓模型权重系数λ1和λ2需要根据具体图像进行调试,不具有普适性,且增加权重的新拟合中心会提高算法复杂度。为加快模型收敛,对权重系数进行改进,提出自适应权重系数A1和A2代替固定权重λ1和λ2,表示为:

式中,D1和D2为区域像素最大灰度中值绝对差,表示为:

式中,d1和d2分别为轮廓内部和外部的灰度中值[23]。
当曲线内部灰度差异大于外部灰度差异时,内部能量大于外部能量,相应的D1>D2,则A1>A2,随后的曲线演化过程中内部能量起主要作用,加快曲线逼近目标边缘。当曲线外部灰度差异大于内部灰度差异时,外部能量大于内部能量,相应的D2>D1,则A2>A1,随后的曲线演化过程中外部能量起主要作用,加快曲线逼近目标边缘。
相较于传统活动轮廓模型中的固定权重设置,自适应的权重系数有更大优势。曲线演化中内外能量是不断变化的,固定的能量系数不仅影响分割速度,还会影响分割结果。
2.4 新模型的水平集表达
新模型能量函数构造为:
引入时间变量t,利用变分法和梯度下降流求解式(21),得到演化方程为:
式(22)右侧第一项的作用为保持演化曲线平滑,第二项和第三项的作用为推动曲线演化。
综上所述,本文模型算法的具体步骤为:①初始化水平集函数φ0;②计算内外区域灰度均值c1和c2;③计算权重m1和m2,进一步计算新拟合中心c11和c22;④更新水平集函数φ;⑤检查方程演化是否稳定,稳定则结束,否则返回至第二步。
3 实验结果与分析
以不同含噪图像为实验对象验证本文模型的有效性,并与C-V 模型、LCV 模型和RSF 模型进行对比实验,以验证本文模型在含噪图像分割上的优势。实验环境:CPU 型号为Intel Core i7-4720HQ,主频为3.60GHz,内存为4GB,仿真软件为MATLAB R2016b,操作系统为Windows10。参数除特别说明外,均设置为:μ=0.01×255×255,ε=1,σ=3,λ1=1,λ2=1,v=0,α=1,β=1。
3.1 初始轮廓的鲁棒性
选择不同的初始轮廓对噪声图像进行分割,结果表明,不论初始轮廓是在分割目标的内部、外部或与目标区域相交,本文模型均能较好地进行分割,验证了该模型对初始轮廓的鲁棒性较好。详见图1。
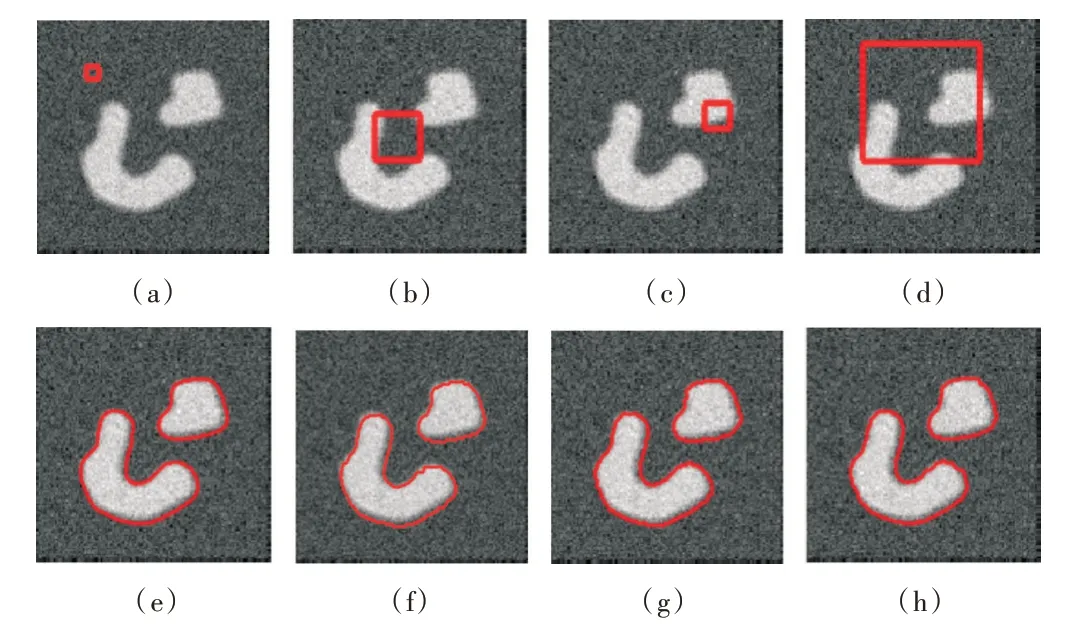
Fig.1 Four different initial contours(a-d)and their corresponding segmentation results(e-h)by the proposed model图1 本文模型对4 种不同初始轮廓(a-d)的分割结果(e-h)
3.2 与其他模型的比较实验
图2 为4 种模型对含噪花图像的分割结果,从左到右依次为模型的初始轮廓、最终分割轮廓和分割效果。可以看出,C-V 模型有少数像素点分割错误且分割结果不完整;LCV 模型有较多像素点分割错误;RSF 模型的参数为λ1=1,λ2=2,μ=0.03×255×255,有较多背景和目标像素的分割错误。本文模型的分割效果明显优于C-V 模型、LCV 模型和RSF 模型,有一定的抗噪性。这是由于该模型采用拟合图像代替原图像和新的拟合中心,可以突出含噪图像的边缘信息,弱化噪声点对分割结果的影响,从而得到较为准确的目标边缘,同时对凹边界和弱边界有较强的提取能力。

Fig.2 Segmentation results of noisy flower image of each model图2 各模型含噪花图像分割结果
图3 为4 种模型对含噪两形状图像的分割结果,从左到右依次为模型的初始轮廓、最终分割轮廓和分割效果。可以看出,C-V 模型对目标区域的分割效果较差,受噪声影响较大,目标区域有较多像素点分割错误;LCV 模型对背景区域的分割效果较差,受噪声影响的背景区域有较多像素点分割错误;RSF 模型的背景区域错误分割较多,目标区域分割不完整,整体分割效果不佳。本文模型对目标区域和背景区域的分割结果准确,没有受噪声影响而产生错误的像素点分割,结果优于C-V 模型、LCV 模型和RSF 模型。


Fig.3 Segmentation results of two shape images with noise of each model图3 各模型含噪两形状图像分割结果
图4 为4 种模型对含噪葫芦图像的分割结果,从左到右依次为模型的初始轮廓、最终分割轮廓和分割效果。可以看出,C-V 模型和LCV 模型的边界分割效果不好,分割轮廓不平滑,边缘有过分割和欠分割现象;RSF 模型在背景区域存在错误分割且边缘不平滑。本文模型分割轮廓平滑,分割效果优于C-V 模型、LCV 模型和RSF 模型。

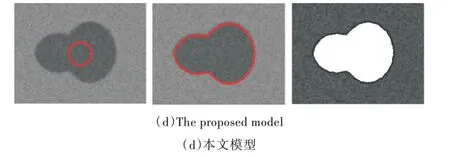
Fig.4 Segmentation results of noisy gourd image of each model图4 各模型含噪葫芦图分割结果
从表1 可以看出,LCV 模型和RSF 模型在分割速度上优于本文模型和C-V 模型,这是由于LCV 模型和RSF 模型中添加了无需重新初始化的惩罚项,不需要每次重新初始化水平集函数,可以缩减运行时间。但本文模型在迭代次数和分割效果方面明显优于C-V 模型、LCV 模型和RSF 模型,且该模型引入了速度函数,在运行时间上优于C-V 模型。针对以上3 个含噪灰度图像,本文模型的分割时间比C-V 模型分别缩短了72.30%、82.95%和75.79%。
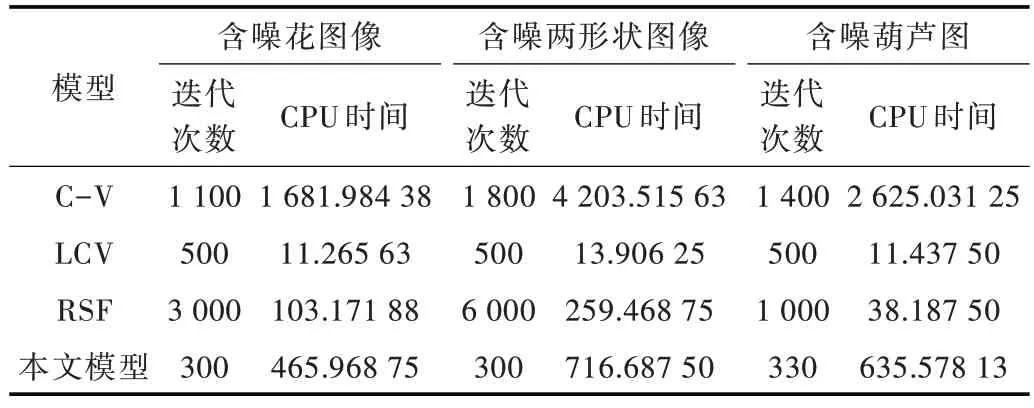
Table 1 Iteration times and CPU time of different models表1 不同模型迭代次数与CPU 时间
4 结论
本文针对传统活动轮廓模型对含噪图像分割效果不佳的问题,提出结合局部信息的活动轮廓模型。该模型通过增加局部信息速度函数提高分割速度,改进拟合项以减少噪声干扰,同时还能增强边缘特征,进一步提高分割精度。此外,该模型采用自适应权重系数代替传统分割模型中的固定系数演化曲线,从而可以根据不同图像自适应调节参数。本文模型具有较好的分割效果,既能够克服噪声的影响,又能较好地提取目标轮廓,轮廓边缘平滑,没有过分割和欠分割现象,对凹边界和弱边界均有较强的提取能力。相较于C-V 模型、LCV 模型和RSF 模型,本文模型得到目标轮廓的分割迭代次数更少,分割效果也更好。但本文模型的分割时间仅优于C-V 模型,而明显长于LCV 模型、RSF 模型的分割时间,在分割速度方面还需要进一步提升。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
高技术通讯(2021年3期)2021-06-09
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年5期)2017-05-14
自动化学报(2017年11期)2017-04-04
光学精密工程(2016年1期)2016-11-07
计算机工程(2015年4期)2015-07-05