
基于门控循环神经网络的光伏阵列 故障识别与定位研究
2022-03-25 08:47高天龙刘卫亮张文军
热力发电 2022年3期
高天龙,刘卫亮,张文军
(1.西北工业大学微电子学院,陕西 西安 710129;2.华北电力大学自动化系,河北 保定 071003)
近年来,随着社会的快速发展,能源需要日益增加。太阳能作为一种新能源,以其清洁、可再生等优势得到广泛应用。同时光伏电站大多修建在沙漠、荒地等环境比较恶劣地区,光伏组件长期裸露在外,容易受到高温暴晒、风沙和雨雪侵蚀,从而发生故障,影响光伏板的使用寿命以及光伏电站的发电效益。
针对光伏电站故障识别与定位,国内外学者开展了一些相关研究。国外学者中,M.S Iqbal等[1]提出了一种基于学生t检验的光伏电站故障检测方法,该方法只针对电站的并网直流侧,通过比较光伏电站实际与理论参数来识别不同故障类型;Liang等人[2]采用极限学习机和k均值聚类算法识别光伏电站异常情况,该方法未对光伏故障类型进行详 细区分;Liu等人[3]通过动态时间归整测量多个电 压和电流的时间子序列,然后利用k均值聚类算法对相似性进行分类,进而识别光伏故障,该方法未对光伏故障进行定位;Dhimish等人[4]提出一种基 于径向基和模糊控制检测光伏故障的方法,采用光伏系统电压和功率作为模型的输入,进行光伏故障识别与定位,该方法故障类型设置单一且识别精度相对较低。
国内学者中,于航等[5]提出了一种基于3倍标准差准则与模糊c均值聚类相结合的光伏故障定位方法,该方法能够准确定位光伏电站直流侧故障,但其未对光伏故障类型进行区分;李光辉等[6]利用光伏阵列电压与电流,通过半监督机器学习算法识别故障类型,该方法只针对老化和开路故障。马纪梅等[7]提出一种基于改进径向基(RBF)神经网络的光伏组件故障识别策略,能够对击穿、开路和短路故障进行准确识别与定位,但该方法训练样本较少存在偶然性;叶进等[8]提出一种基于级联随机森林的光伏组件故障诊断策略,通过气象监测数据与光伏电站监测数据,对是否正常、老化、遮掩、热斑和其他异常情况进行识别,但未对故障进行定位。
上述光伏故障识别算法针对多类型故障识别率均较低,且故障定位误判率较高。因此,本文提出一种基于门控循环(GRU)神经网络的光伏电站故障识别与定位策略:依据光伏组件工程模型,结合扰动观测法和并网PQ控制,搭建光伏电站仿真模型;模拟光伏电站典型故障,获取直流测串联光伏板电压、电流和交流测电流、输出功率以及光伏电站特征参数;采用GRU神经网络与BP神经网络进行故障识别与定位。最后通过光伏实验平台验证模型的准确性和有效性。
1 光伏电站仿真模型搭建
1.1 光伏组件数学模型
光伏组件为光伏阵列的最小发电单元,由众多P-N结构成,结合材料物理和电子学理论,可得光伏组件数学模型为[9]:

式中:V和I分别为光伏组件输出电压与电流;IPV为光生电流;I0为反向饱和电流;q为电量电荷;n为理想因子;k为玻尔兹曼常数;RSh和RS分别为并联电阻和串联电阻;T为光伏板温度。
依据光伏组件的数学模型和标准工况下的电气特性,可推导出光伏组件的工程模型为:
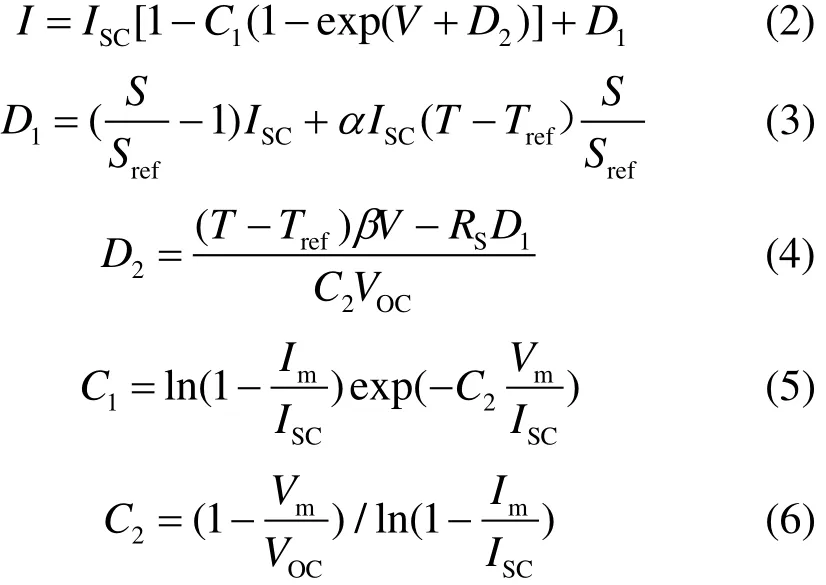
式中:ISC和Voc分别为光伏组件短路电流与开路电压;Tref为工作温度;S为辐射强度;Vm和Im分别为最大功率点下的电压与电流;α、β为温度系数。
1.2 光伏电站仿真模型
光伏阵列一般由多个光伏光伏板串联或并联组成,无论串联还是并联都不会改变单个光伏板的特性。因此依据光伏组件工程模型,在标准测试条件下(辐射强度1 000 W/m2,温度25 ℃)搭建光伏组件的仿真模型,如图1所示。将光伏板模型进行封装,给每块光伏板后都配备1个最大功率点跟踪(maximum power point tracking,MPPT)控制器,并采用扰动观测法实现光伏组件的最大功率跟踪。 在Simulink环境下,采用封装后的光伏组件模型,搭建3×4光伏阵列,其中每列由4块光伏板串联而成。然后结合采用扰动观测法的MPPT控制器和基于并网PQ控制的三相逆变器,构成光伏电站仿真模型。其中采样时间设置为0.000 1 μs,逆变器设置为平均VSC模型,整个光伏发电系统的主电路仿真如图2所示。
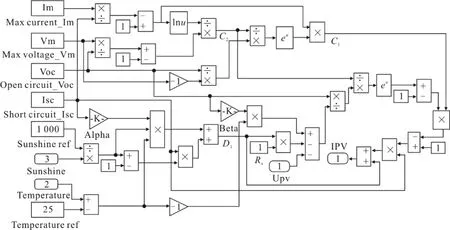
图1 光伏组件仿真模型 Fig.1 The photovoltaic module engineering model
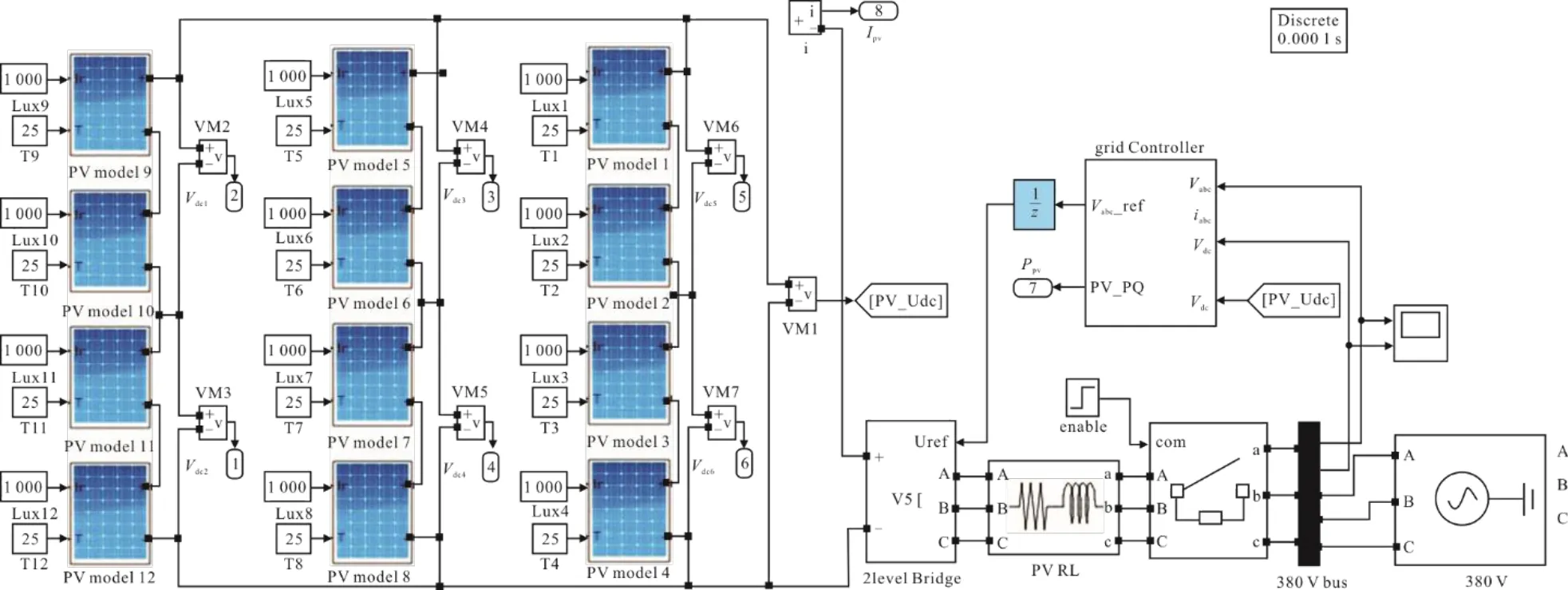
图2 光伏发电系统的主电路仿真 Fig.2 Simulation diagram of main circuit of the photovoltaic system
两级式三相逆变器采用PQ控制策略,将三相电压Vabc和电流Iabc经dq变换,转换成不存在耦合关系的d轴分量vd、id和q轴分量iq。利用光伏电站并网无功功率Q和vd计算参考电流iq*。引入电网电压前馈信号Vdc和参考电压Vref,经过PI控制器计算得参考电流id*。通过功率解耦控制,分别计算q轴和d轴的参考电压,经dq/abc坐标变换,转换成电压Uabc,从而控制三相逆变器,其Simulink控制模型如图3所示。
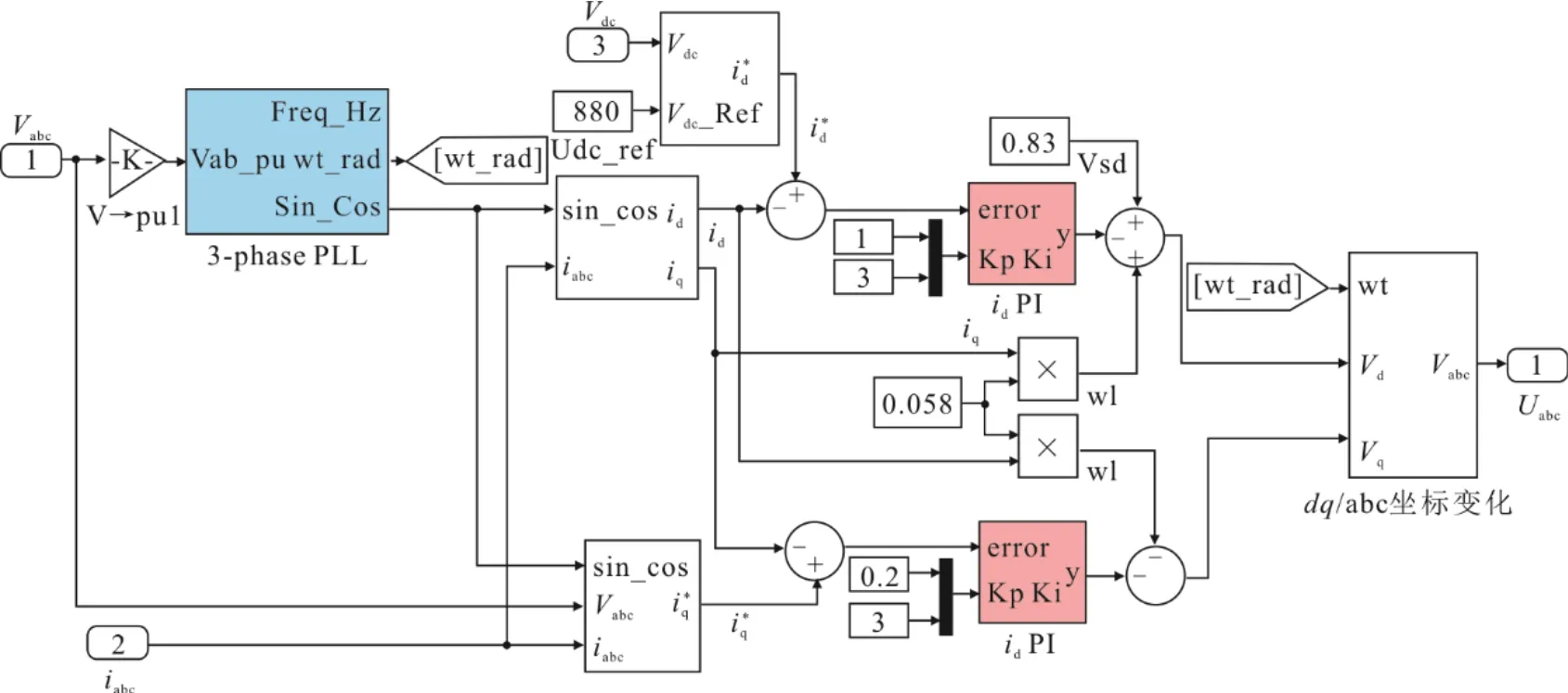
图3 三相逆变器PQ控制模型 Fig.3 The PQ control model of three-phase inverter
2 光伏电站故障特征模拟
本文选取光伏阵列中常见的6种故障进行分析,利用光伏电站仿真模型模拟光伏故障,获取不同故障下光伏电站输出参数,通过分析对比选定光伏故障识别特征参数。
2.1 光伏电站输出参数选取
选取光伏阵列输出电压、电流和功率来识别与定位光伏故障,考虑到光伏电站减少传感器数量会降低运营成本,于是在光伏阵列每一列的每2块光伏板并联1个电压传感器,共需要6个电压传感器。为确保光伏故障能够精确识别与定位,并验证系统的稳定性,引入光伏电站交流侧电流。运行仿真模型,测试系统的动态响应性能,将光照强度设置为阶跃信号,初始值为1 000 W/m2,在0.04 s时光照强度下降至500 W/m2,绘制三相并网电流响应曲线,结果如图4所示。由图4可见,并网电流能够快速响应,经0.01 s暂态过程后趋于稳定。且随着光照强度降低,交流电流的有效值也随之减小。
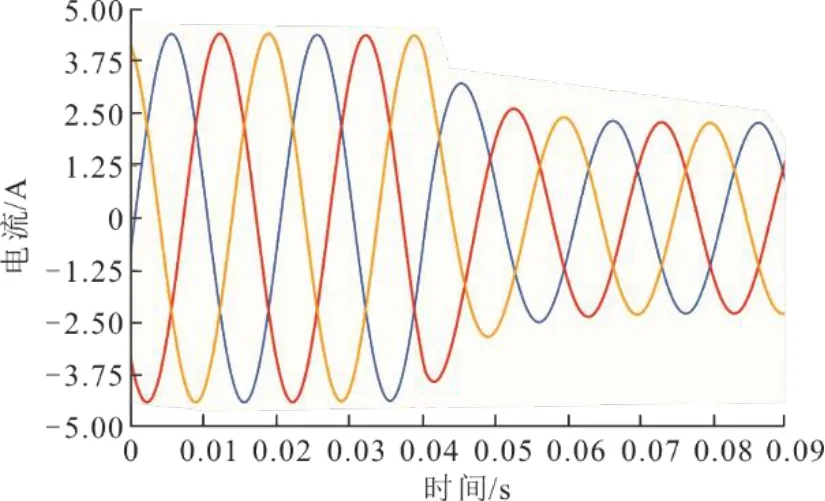
图4 三相并网电流响应曲线 Fig.4 Response curves of three-phase grid-connected current
因此,选取每2块光伏板对应的输出电压Vdc1—Vdc6、直流电流IPV、交流电流Iabc、输出功率PPV以及辐射强度G作为光伏电站的特征参数。
2.2 光伏电站故障工况设置
图5为光伏阵列不同故障模拟。首先,在标准状况下将第1列中的1块光伏板从光伏阵列中断开,来模拟光伏阵列断路故障。同样,通过导线将光伏板两端短接,来模拟光伏阵列短路故障。通过改变光伏阵列区域光照强度来模拟阴影遮挡,不同阴影遮挡系数不同[10]。经仿真测试,发现遮挡系数小于0.95时模型可以正确区分,于是将第2列2块光伏板光强设置为正常光强的0.9倍,来模拟局部遮挡。将后2块光伏板光强设置为正常光强0.3倍,来模拟阴影遮挡。同样的情况下,将2块光伏组件遮挡系数调整为0.9,且将光伏板温度设置为80 ℃,来模拟光伏热斑[11]。
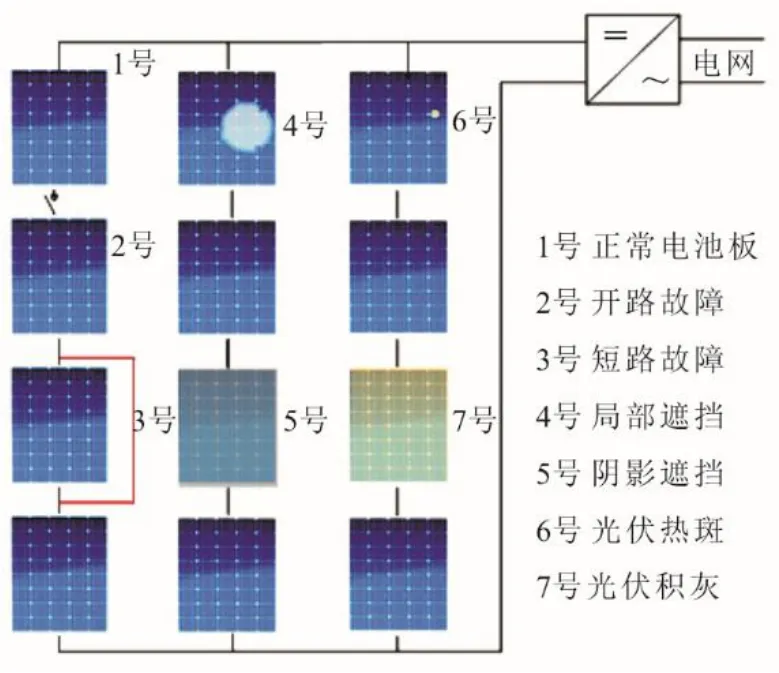
图5 光伏阵列不同故障 Fig.5 Different faults of the photovoltaic array
光伏组件暴露在室外一段时间,会在表面附着一层积灰,从而影响光伏组件的输出功率。李练兵等[12]在天津开展一项实验表明,光伏组件在室外静置6天,其表面积灰密度达到1 g/m2,输出功率相应衰减8%。表1[13]为黄土积灰下光伏组件发电效率,拟合积灰密度R与相对发电效率η函数,可得:

表1 黄土积灰下光伏组件发电效率 Tab.1 The power generation efficiency of photovoltaic panels under loess ash accumulation

根据式(6),在Simulink环境搭建积灰模块,模拟密度为5 g/m2的积灰故障。
2.3 光伏电站故障模拟结果
采用光伏电站仿真模型验证所选参数能否满足光伏阵列故障的识别与定位。在标准工况下,采集光伏阵列逆变后的输出功率,并绘制曲线,结果如图6所示。
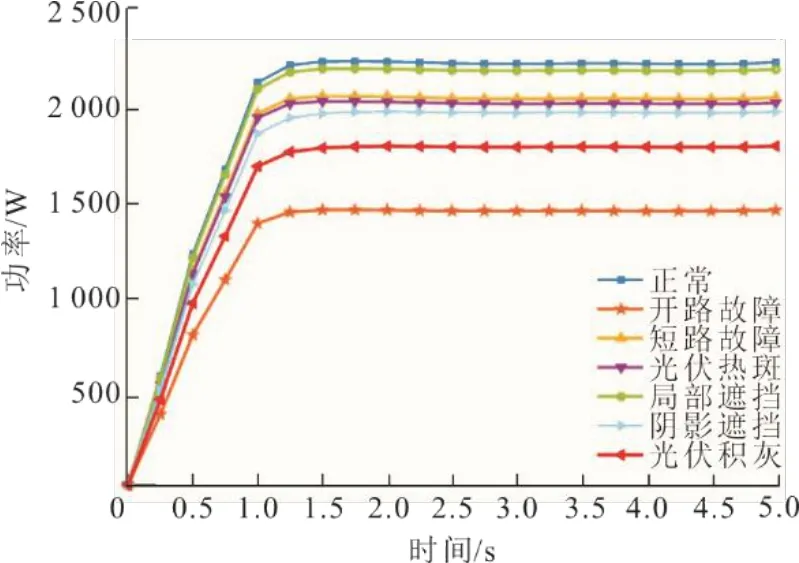
图6 不同故障情况下光伏电站的输出功率曲线 Fig.6 The grid-connected power curves of photovoltaic power stations under different fault conditions
由图6可见,光伏阵列在不同故障状态下输出功率区分明显,故所选输出参数合理。
模拟不同光伏故障时,采集不同辐射强度(400~1 000 W/m2)下的光伏阵列输出数据,对应故障分别记录280组,构建1 960组训练样本集,表2为光伏电站在不同故障下的输出参数。
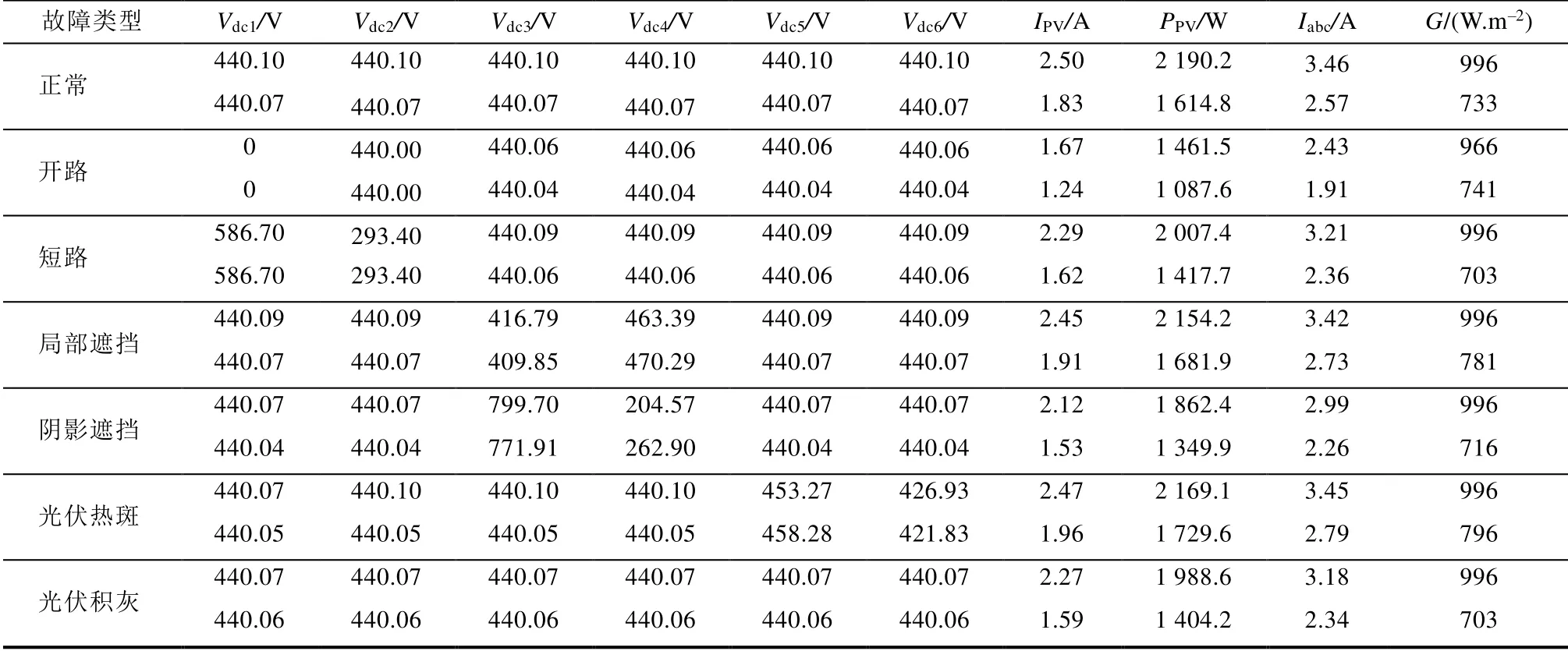
表2 光伏电站在不同故障下输出参数 Tab.2 The output parameters of photovoltaic power station with different faults
3 光伏电站故障诊断模型
基于GRU神经网络的光伏电站故障诊断流程如图7所示。
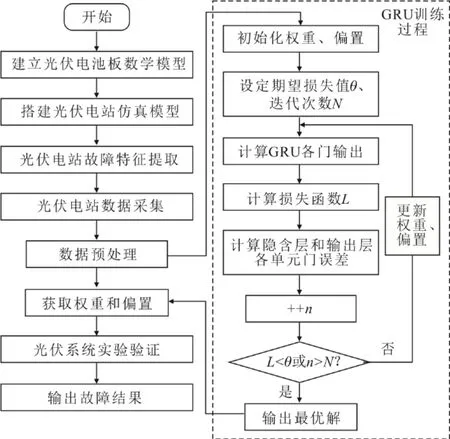
图7 光伏电站故障诊断流程 Fig.7 The fault diagnosis flow chart of photovoltaic power station
由图7可见,将预处理后的数据输入GRU神经网络进行训练,设定初始权重、偏置、迭代次数N、期望损失值θ,计算GRU神经网络各个输出门和损失值L。每次通过比较L与θ的大小,得到迭代N次数后的最优权重和偏置,最后利用光伏实验平台对故障诊断模型进行验证。
3.1 GRU神经网络学习算法
GRU神经网络在2014年由Kyunghyun Cho提出,解决了标准循环神经网络(RNN)的梯度消失问题。GRU神经网络基于长短时记忆(LSTM)神经网络进行改进,简化门结构为更新门与重置门,其原理如图8所示。
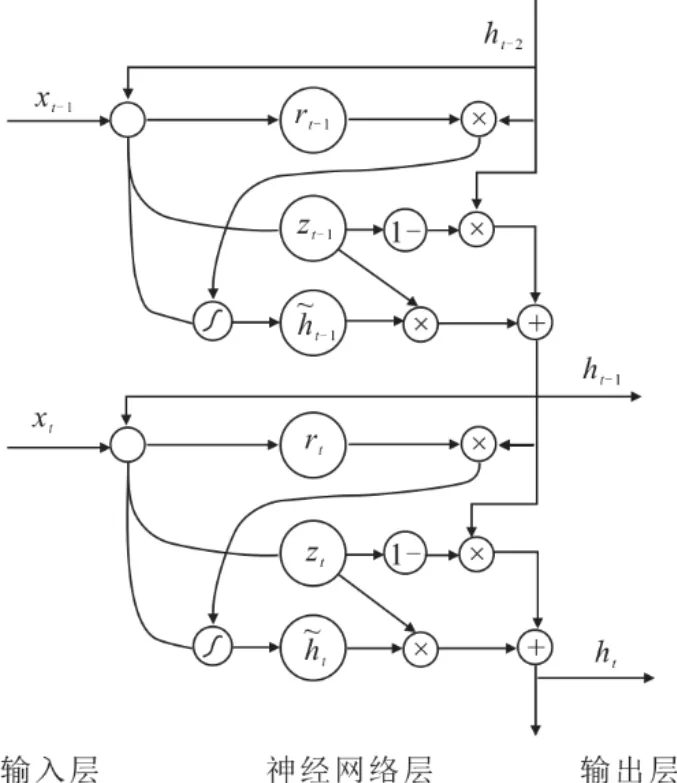
图8 GRU神经网络原理 Fig.8 Principle diagram of cellular structure of the GRU neural network
由图8可见,GRU神经网络中输入层沿网络正向传播,其中包括更新门rt、重置门zt、当前存储状态单元、当前时刻输出状态ht4个变量,各变量计算公式为:
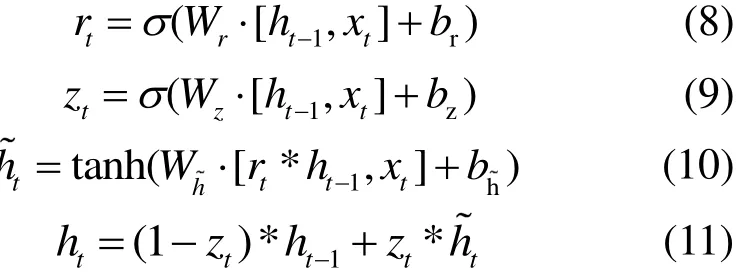
式中:σ为sigmod激励函数;Wr、Wz、分别为更新门、重置门和当前存储状态单元的权重;ht-1、xt分别为上一时刻输出和当前时刻输入;br、bz、分别为更新门、重置门和当前存储状态单元的偏置。
3.2 数据预处理与模型评估
采用上述光伏电站故障模拟获取的1 960组样本集,来训练故障诊断模型。为确保诊断模型能够快速进行迭代训练且训练结果真实有效,对训练样本进行数据清洗和归一化处理。通过归一化后的盒形图能更直观地区分正常光伏板与不同故障下光伏板的特征参数,图9为正常光伏板与故障光伏板归一化后的特征参数。图9中样本集辐射强度范围400~1 000 W/m2,组成训练样本时取后20个辐射强度对应的490组样本集作为测试样本。
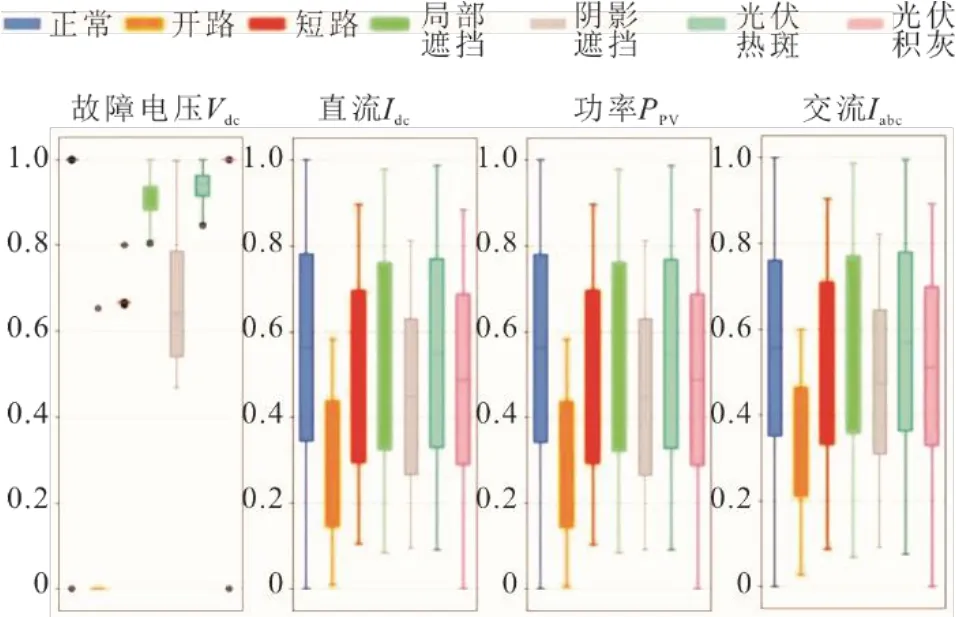
图9 正常光伏板与故障光伏板归一化后的特征参数 Fig.9 The normalized characteristic parameters of normal and fault panels
本文选用准确率和交叉熵损失函数(L)作为模型评估指标,对光伏故障分类效果进行评估。损失函数值越小,模型分类结果越好。其计算公式为:

式中:L(θ)和hθ分别为实际和预测光伏故障识别结果;n为时间序列。
3.3 模型训练
将预处理后的数据作为GRU神经网络的输入,依据第2节选取的光伏电站故障特征参数,设置GRU神经网络模型输入层为10维(对应光伏电站10个故障特征参数),将隐藏状态和输出状态进行全链接,设置32个隐藏节点、输出层为3维,即输出故障类型(对应故障类型1—6)和故障定位(对应3×4阵列)。然后对GRU神经网络进行迭代训练,其训练过程模型损失值如图10a)所示。
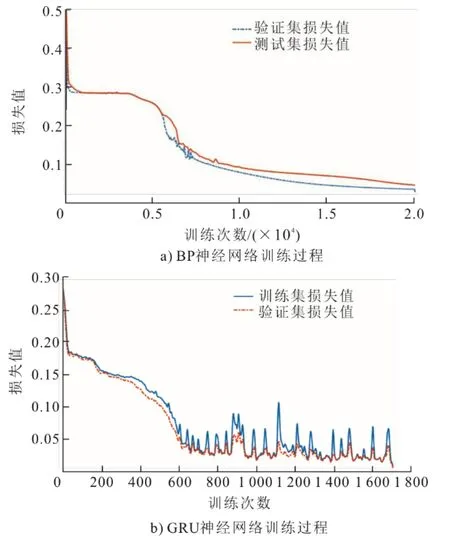
图10 BP神经网络与GRU神经网络迭代过程的损失值 Fig.10 Loss values of iterative process of the BP and GRU neural network
同样,将预处理后的数据输入BP神经网络,BP神经网络包含输入层、隐含层、输出层,并由权值互相连接,分别设置输入层为10维,隐含层节点为20,输出层为3维,学习率为0.01,迭代次数为20 000,构建10-20-3的BP神经网络。其训练过程损失值如图10b)所示。
由图10可见,刚开始训练损失值快速下降,随着迭代次数增加,损失值曲线逐渐趋于平缓。BP神经网络迭代18 000次后损失值降为0.035 7,而GRU神经网络迭代1 750次后损失值降为0.009 1。故障分类和定位已达到精度要求,故停止模型迭代训练。
采用490组测试样本进一步对比BP神经网络和GRU神经网络故障分类和定位的准确性,训练结果见表3。由表3可见,GRU神经网络模型训练结果均优于BP神经网络,GRU神经网络模型的验证集损失值为0.006 1,测试正确率为99.59%,相对BP神经网络提高0.41百分点。

表3 BP神经网络和GRU神经网络模型训练结果 Tab.3 Training results of the BP and GRU neural network model
将GRU神经网络故障诊断模型的测试集结果进行反归一化处理,输出光伏电站故障分类和定位,结果如图11所示。由图11可见,GRU神经网络模型只有1次将局部遮挡故障误认为短路故障,且对应位置误定位为(1, 2),其余测试样本均能准确识别和定位。

图11 GRU神经网络故障识别与定位结果 Fig.11 The fault identification and location results based on GRU neural network
4 实验分析
基于保定某地的光伏实验平台(图12)进行验证,光伏实验平台由32个光伏组件、MPPT控制器和负载构成。其中光伏组件的额定功率为50 W,倾角为48°,每块光伏板都配备MPPT控制和负载,选取4块光伏板进行编号(PV1—PV4)。
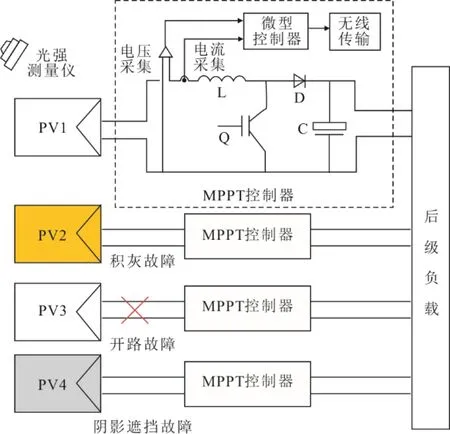
图12 光伏实验平台设备连接示意 Fig.12 Schematic diagram of the equipment connection of photovoltaic experimental platform
实验中创建4类常见故障:开路、局部遮挡、阴影遮挡和积灰故障。人为断开PV1光伏板模拟光伏阵列开路故障,由树叶、鸟粪等附着在光伏板表面形成局部遮挡故障。本文于2021年4月27日12:00—16:30晴天工况下进行光伏板局部遮挡实验,将遮挡物在PV2光伏板表面放置20 min,测量光伏阵列输出功率。
然后在2021年4月28日12:00—17:00晴天工况下进行光伏积灰实验,首先将光伏板清洗干净,人为在PV3光伏板上均匀涂抹密度为5 g/m2的黄土,采集光伏组件的运行参数。在同样工况下,于2021年5月2日12:00—17:00开展阴影遮挡实验,测量光伏阵列输出功率。
绘制不同故障下测量的光伏阵列输出功率曲线,结果如图13所示。由图13可见,当PV4支路从光伏阵列中断开模拟光伏阵列开路故障,出现输出功率整体下降。局部遮挡故障在放置遮挡物后,光伏阵列输出功率突然下降,移除后功率恢复正常。当PV2发生积灰故障时,光伏阵列输出功率与正常工况下有明显区分。在15:30时PV4光伏板被建筑物所遮挡,形成阴影遮挡故障,其输出功率呈断崖式下降。
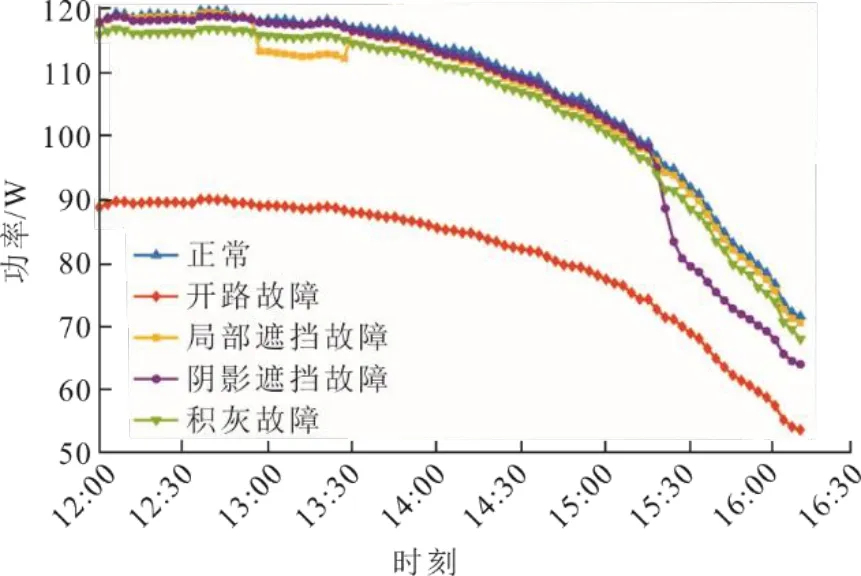
图13 不同故障状态下光伏阵列的输出功率对比 Fig.13 Comparison of output power of the photovoltaic array under different fault conditions
光伏实验平台每隔5 min保存一次数据,分别采集5 h不同故障下的光伏阵列输出参数,构建了420个测试样本集。将测试样本输入训练好的GRU神经网络中,其部分输出结果见表4。由表4可见,本文GRU神经网络模型的故障诊断准确率为100%,能准确识别和定位故障。
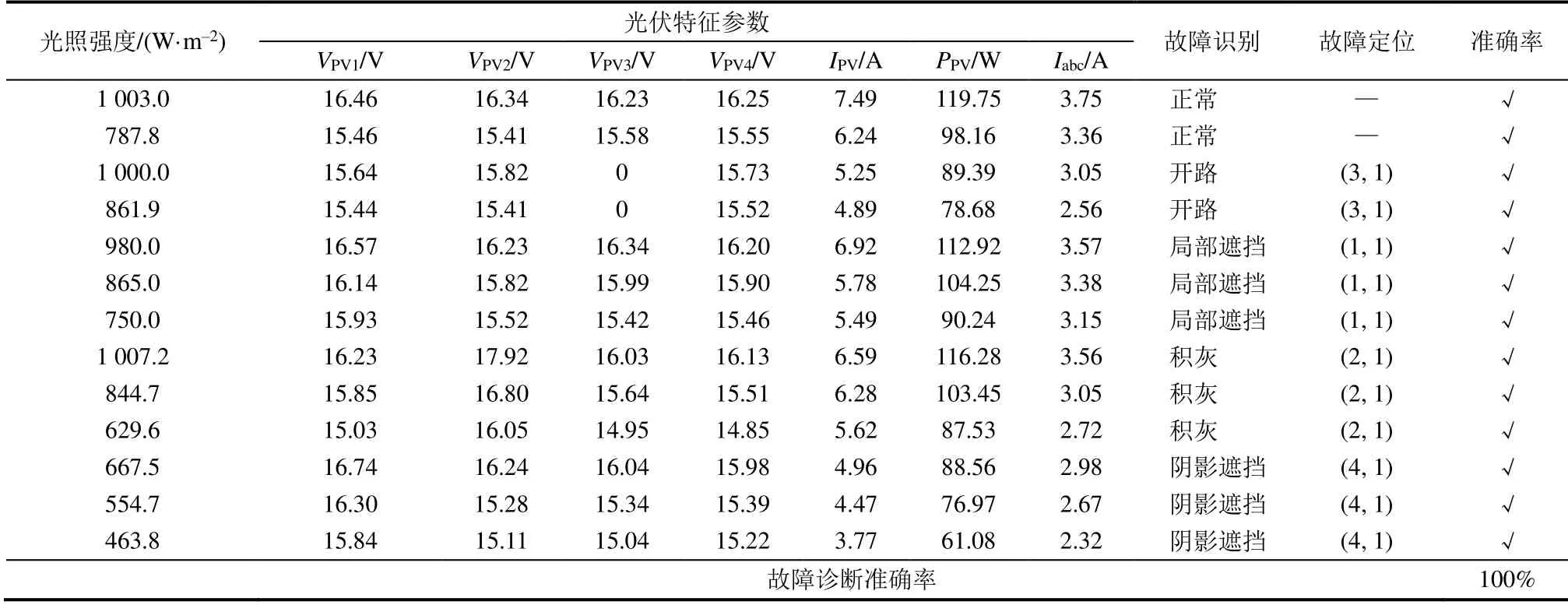
表4 不同故障下光伏4×1阵列的识别与定位结果 Tab.4 Identification and location results of photovoltaic 4×1 array with different faults
5 结 论
1)将GRU神经网络应用于光伏电站故障诊断与识别中,搭建光伏电站仿真模型。模拟光伏阵列典型故障,采集光伏电站输出参数,作为GRU神经网络故障识别与定位的训练样本。
2)提出一种基于GRU神经网络的光伏电站故障识别与定位策略,可以准确识别与定位光伏电站典型故障,便于发生故障时,能够快速对光伏板进行维护,也可以提前预警,避免永久损坏光伏板。
3)通过仿真和实验,GRU神经网络故障诊断方法的损失值为0.006 1,其正确率相较于BP神经网络提高了2.75百分点,且测试集准确率达到99.95%;证明GRU神经网络故障诊断方法在实际工况下能正确识别与定位光伏阵列故障,可用于指导光伏电站日常维护,提高电站的经济效益。
猜你喜欢
能源工程(2022年2期)2022-05-23
太阳能(2022年2期)2022-03-07
上海节能(2021年12期)2021-12-29
汽车维修与保养(2020年11期)2020-11-23
科技创新与应用(2017年25期)2017-09-09
中华建设科技(2017年6期)2017-07-21
科技视界(2016年18期)2016-11-03
新媒体研究(2014年11期)2014-09-01
